Составим функциональную схему стабилизации температурных режимов рис. 1, состоящую из релейного регулятора и схемы управления шаговым электродвигателем ШД-200-3. Информация о положении заготовки поступает от лазерного датчика фирмы «ВЕТА». По каналу информация о температуре в зоне нагрева поступает в виде аналогового сигнала, принимающего либо положительное, либо отрицательное значение в зависимости от направления рассогласования. Этот сигнал поступает на вход релейного регулятора, выполненного в виде триггера Шмита, обеспечивающего статическую характеристику реального реле с зоной нечувствительности и с гистерезисом. Шаговый двигатель работает в реверсивном режиме, обеспечивая подачу газа с помощью клапана, который при необходимости открывается и подаёт инертную среду.
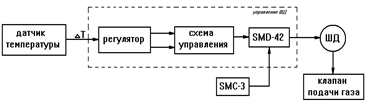
Рис. 1. Функциональная схема стабилизации температурных режимов.
В процессе вытяжки фторидных волокон недостаточно только поддерживать температуру на заданном уровне, необходимо также одновременно центрировать заготовку. С этой целью используется координатный стол, жёстко скреплённый с трубой, в которой находится заготовка.
Для реализации перемещения координатного стола составим функциональную схему системы управления, рис. 2. Она состоит из двух идентичных каналов, состоящих из релейного регулятора и схемы управления шаговым электродвигателем ШД-200-3. Информация о положении заготовки поступает от лазерного датчика фирмы «ВЕТА».
По каждому из двух каналов информация о положении заготовки поступает в виде аналогового сигнала, принимающего либо положительное, либо отрицательное значение в зависимости от направления рассогласования. Этот сигнал поступает на вход релейного регулятора, выполненного в виде триггера Шмита, обеспечивающего статическую характеристику реального реле с зоной нечувствительности и с гистерезисом. Шаговые двигатели работают в реверсивном режиме, обеспечивая перемещение координатного стола в направлении уменьшения величины рассогласования положения заготовки, относительно центра нагревательного устройства.
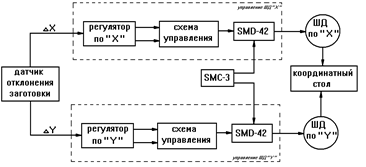
Рис. 2. Функциональная схема системы управления координатным столом.
Регулятор, реализованный на операционных усилителях, обеспечивает следующую статическую характеристику:
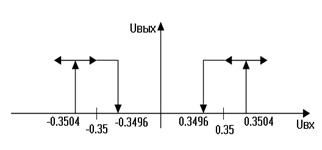
Рис. 3. Статическая характеристика регулятора
ширина петли 
Реализуем выше приведённые функциональные схемы, а именно схему стабилизации температурных режимов рис. 4 и схему системы управления координатным столом рис. 5.
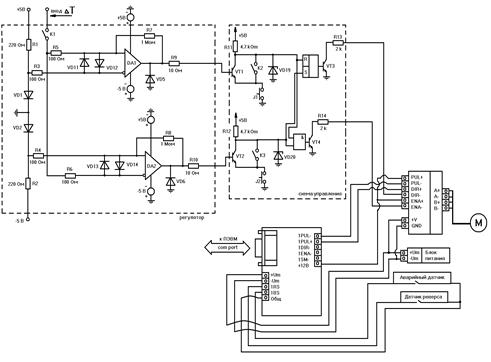
Рис. 4. Схема системы управления стабилизации температуры.
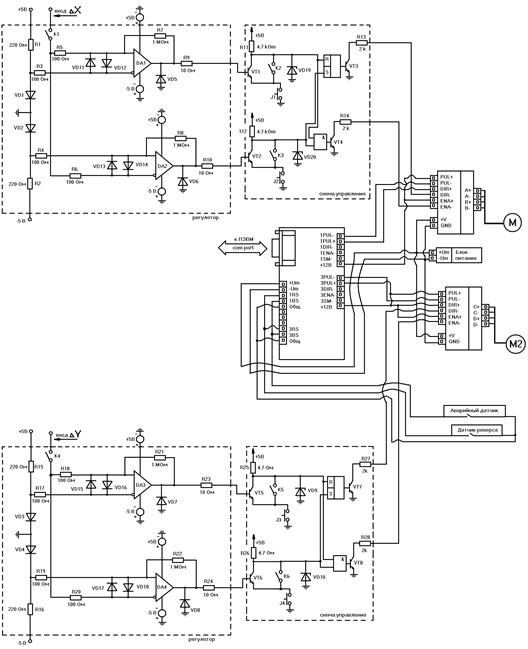
Рис. 5. Схема системы управления координатным столом.
Ток, протекающий по цепи с диодами VD1 – VD2, равен:
 mA
mA
 Ом = 1000 Ом = 1 kОм
Ом = 1000 Ом = 1 kОм
 Ом = 0.5 kОм, соответственно
Ом = 0.5 kОм, соответственно  kОм, так как это максимальное значение сопротивлений для этого участка цепи, то выберем значения меньшие полученного, чтобы резисторы во время работы не нагревались:
kОм, так как это максимальное значение сопротивлений для этого участка цепи, то выберем значения меньшие полученного, чтобы резисторы во время работы не нагревались:

 Ом
Ом
Выберем сопротивления:

 Ом и
Ом и  МОм,
МОм,
соответственно:
 =100 Ом и
=100 Ом и  МОм.
МОм.
Транзисторы VT1 - VT8 возьмём серии КТ3102Г.
На выходе операционного усилителя (ОУ серии К140УД7) имеем сигнал U=4В, сопротивления:
 Ом.
Ом.
Ток, протекающий по цепи с транзисторами VT1, VT2, VT5 и VT6 I = 1mA (при таком токе транзистор полностью открыт), следовательно  Ом = 5 kОм. Опять же это максимальные номиналы резисторов, при них они будут нагреваться, поэтому возьмём значения немного меньшие:
Ом = 5 kОм. Опять же это максимальные номиналы резисторов, при них они будут нагреваться, поэтому возьмём значения немного меньшие:
 kОм.
kОм.
Блок SMD-42 работает при токе I  mA, выберем значение I = 6 mA.
mA, выберем значение I = 6 mA.
 Ом = 2 kОм.
Ом = 2 kОм.
У стабилитронов VD19, VD20, VD9 и VD10 напряжение стабилизации должно быть в диапазоне 2.4 – 3.6 В, возьмём серии 2С101А.
Операционный усилитель не терпит большой разницы напряжения между входами. Для защиты входов от перенапряжения используются диоды, включенные между входами встречно - параллельно VD1-VD8 и VD11-VD18 типа КД503А.
Дата: 2019-12-10, просмотров: 441.