В соответствии с концепцией распределенной системы терминального управления робототехнического комплекса, изложенной в разделе 4, в состав РСТУ входит специализированное программное обеспечение пульта управления РСТУ, выполняющее управление всем комплексом.
Выбор среды разработки
Язык программирования, на котором будет реализовываться специализированное ПО пульта управления РСТУ должен отвечать следующим требованиям [14, 15]:
- давать возможность работать с массивами данных;
- выполнять различные математические функции;
- возможность визуализации расчетных данных
- давать достаточно простой способ для создания приложений под Windows.
Поэтому в качестве языкового средства выбираем продукт фирмы Borland язык программирования высокого уровня Borland C++, который является одной из самых популярных систем разработки математического обеспечения. Система предоставляет в распоряжение программиста высокопродуктивные средства разработки 16- и 32-разрядных приложений для операционных систем Windows 95/98, Windows NT и DOS. Модифицированные библиотеки Object Windows Library (OWL) и Microsoft Foundation Classes (MFC), а также инструменты Visual Database Tools (VDBT) для визуальной разработки эффективных приложений баз данных выводят Borland C++ на новый качественный уровень систем объектно-ориентированного программирования.
При создании приложения для Windows на языке C++, значительное количество времени приходится уделять созданию пользовательского интерфейса, что затрудняет работу и мешает решению основной математической задачи. Чтобы устранить этот недостаток, в качестве среды программирования предлагается использовать систему визуальной разработки приложений Rapid Application Development (RAD) C++ Builder.
Данный продукт вышел на рынок в 1997 году и уже успел завоевать огромную популярность среди программистов. Перечислим наиболее важные достоинства С++ Builder [15]:
- система имеет удобную визуальную среду, которая обеспечивает разработку приложений из компонентов и поддерживает двунаправленное проектирование (изменения, сделанные в визуальной среде, отражаются на исходном коде программы, а изменение кода отражается в визуальной среде);
- в состав системы входит библиотека визуальных компонентов – Visual Component Library (VCL), ставшую стандартом при создании Windows приложений; существует возможность расширения этой библиотеки компонентами, разрабатываемыми программистом, а также готовыми ActiveX-компонентами сторонних разработчиков;
- С++ Builder содержит в своей основе мощный объектно-ориентированный язык C++, обогащенный новыми синтаксическими конструкциями и понятиями;
- быстрый и надежный компилятор позволяет получать максимально оптимизированные программы;
- интегрированный отладчик с возможностью трассировки программы на уровне машинных команд дает возможность быстро находить ошибки в тексте программы;
- поддержка работы с базами данных, поддерживающих архитектуру клиент-сервер.
Перечисленные выше возможности среды дают основание полагать, что C++ Builder может быть эффективно использован при создании программного обеспечения для РСТУ робототехническим комплексом.
Функциональные возможности ПО РСТУ
Разрабатываемое ПО должно обеспечивать выполнение следующих функций:
- расчет коэффициентов терминального управления;
- отправку информационных объектов роботу манипулятору;
- ведения файла протокола работы РСТУ;
- выполнять визуализацию расчетных данных.
Требования к персональной ЭВМ
Для оптимальной работы разрабатываемого программного обеспечения к ПЭВМ предъявляются следующие требования:
- процессор класса Intel Pentium/Celeron с тактовой частотой не менее 1 ГГц;
- объем оперативной памяти не менее 256 Мб;
- объем жесткого диска не менее 20 Гб;
- объем видеопамяти не менее 32 Мб;
- наличие сетевой платы, обеспечивающей пропускную способность 100 Мбит в секунду.
Для возможности модифицирования программы необходимо наличие установленной системы визуального программирования Borland C++ Builder 6.0.
Руководство пользователя
Программное обеспечение РСТУ представляет собой исполняемый файл RSTUPult.exe. Компиляция программы осуществлена таким образом, что для нормальной работы программы не требуется никаких дополнительных библиотек, достаточно стандартного набора библиотечных функций, входящий в стандартную поставку операционной системы Windows. После запуска программы на выполнение, открывается главное окно приложения, внешний вид которого представлен на рисунке 6.1.
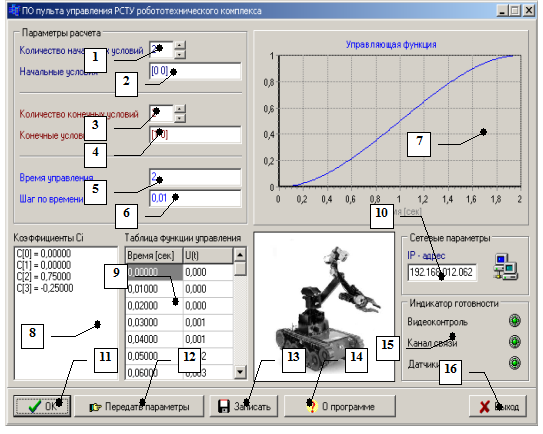
Рисунок 6.1 – Главное окно приложения RSTUPult
Далее описывается элементов управления, расположенных на главной форме приложения.
1 – Инкрементное поле для ввода количества начальных условий.
2 – Поле для ввода начальных условий.
3 – Инкрементное поле для ввода количества конечных условий.
4 – Поле для ввода конечных условий.
5 – Поле ввода времени, за которое объект управления должен перейти из заданного начального в заданное конечное положение.
6 – Поле ввода шага по оси времени для расчета управляющей функции.
7 – Поле для графического представления управляющей функции.
8 – Поле списка с значением коэффициентов терминального управления.
9 – Поле для табличного представления интегральной функции.
10 – Поле ввода IP-адреса получателя информационной посылки.
11 – Кнопка ввода исходных параметров для синтеза управления, расчета терминальных коэффициентов, заполнения таблиц данными.
12 – Кнопка формирования и передачи информационного пакета по заданному IP адресу.
13 – Кнопка формирования и записи файла протокола.
14 – Кнопка вывода вспомогательной информации о создателях программы.
15 – Индикатор готовности подсистем мониторинга и передачи информации.
16 – Кнопка закрытия программы.
Первое, что необходимо сделать оператору РСТУ, это ввести все необходимые параметры для расчета коэффициентов терминального управления. Необходимо следить за тем, чтобы введенное число параметров соответствовало их действительному наличию в поле ввода. В противном случае программа генерирует сообщение об ошибке и просит повторить ввод информации. Также необходимо задать время переход из одного граничного состояния в другое и шаг по временной шкале, для построения управляющей функции. После того как введены указанные выше параметры, можно осуществить нажатие на кнопку Ок. После этого происходит вызов соответствующих функций и вывод расчетных значений пользователю. Рассчитанные коэффициенты терминального управления должны быть переданы в микропроцессорную систему робота манипулятора. Это осуществляется нажатием на кнопку «Передать параметры». Однако при этом следует иметь в виду, что поле «IP-адрес» главного окна приложения должно содержать адрес робота манипулятора, а ПЭВМ пульта управления подключено к сети. В противном случае будет сгенерировано окно сообщения вида
Рисунок 6.2 – Окно сообщения об ошибке
Если окно, изображенное на рисунке 6.2 не появилось, значит, пакет успешно доставлен на борт робота. Вся расчетная информация может быть записана в файл протокола, по желанию пользователя. Для этого нужно нажать на кнопку «Записать». Пользователю будет предложено ввести имя файла, в который будет записан протокол команд. После ввода имени файла протокола программа автоматически генерирует протокол и записывает его в файл. Пример файла протокола приведен ниже:
Файл протокола от 05.06.2005
C[0] = C[0] = 0,00000
C[1] = C[1] = 0,00000
C[2] = C[2] = 0,75000
C[3] = C[3] = -0,25000
Время [сек] U(t)
0,00000 0,000
0,01000 0,000
0,02000 0,000
0,03000 0,001
0,04000 0,001
0,05000 0,002
0,06000 0,003
0,07000 0,004
0,08000 0,005
0,09000 0,006
0,10000 0,007
0,11000 0,009
0,12000 0,010
0,13000 0,012
0,14000 0,014
0,15000 0,016
Рисунок 6.3 – Диалоговое окно ввода имени файла протокола
Для вывода информации о разработчика данного программного обеспечения необходимо нажать кнопку «О программе». В результате появляется окно с краткой информацией об авторах.
Рисунок 6.4 – Диалоговое окно информации о программе
Описание основных функций
Схема алгоритмов, описывающих поведения каждой из приведенных ниже функций, приведены на чертежах. Исходные тексты функций представлены в приложении А
void __fastcall TForm1::bOkClick(TObject *Sender) – Функция-обработчик нажатия на кнопку Ок.
void __fastcall TForm1::FormCreate(TObject *Sender) – Функция инициализирующая вспомогательные параметры при создании приложения.
void __fastcall TForm1::bbSaveClick(TObject *Sender) – Функция-обработчик нажатия на кнопку «Сохранить».
void __fastcall TForm1::bbSendClick(TObject *Sender) – Функция-обработчик нажатия на кнопку «Передать параметры».
double Factorial(int n) – Функция вычисления факториала. Входной парамет n – порядок факториала. Выходное значение – n!
double *CoeffC(double Xo[], int r, double Xk[], int n, double Tk) – Функция расчета коэффициентов терминального управления. Входные параметры: Xo – указатель на вещественный массив начальных условий, r – количество начальных условий, Xk – указатель на вещественный массив конечных условий, n – количество конечных условий, Tk – значение времени опережения. Выходной параметр функции – указатель на массив коэффициентов терминального управления.
Дата: 2019-12-10, просмотров: 344.