Принципиальная схема компьютерного блока питания (рис. 6.) разработана таким образом, что в задачи блока питания входит и приостановка функционирования системы до тех пор, пока величина входного напряжения не достигнет значения, достаточного для нормальной работы компьютера. В каждом блоке питания перед получением разрешения на запуск системы выполняется внутренняя проверка и тестирование выходного напряжения. После этого на системную плату посылается специальный сигнал Power Good. Если этот сигнал не поступил, компьютер работать не будет.
Разделим созданную в среде Micro-Cap схему (рис. 6.) на составные части и рассмотрим, что конкретно представляет каждая часть, и из каких элементов она состоит.
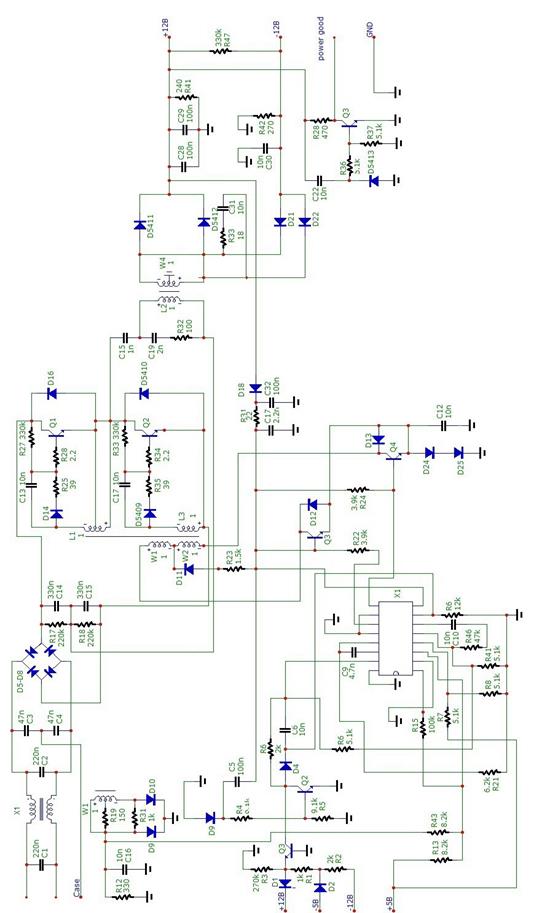
Рис. 6. Принципиальная схема исследуемого компьютерного блока питания
Назначение и состав цепей схемы представлены в таблице 5.
Таблица 5
| Функциональное назначение | Состав |
| Заградительный фильтр | С1, C2, C3, C4, X1 |
| Сетевой выпрямитель с фильтром | D5, D6, D7, D8, C10, C11, R17, R18 |
| Полумостовой преобразователь | Q5, Q6, R27, R28, R29, R30, D16, D17, C15, D14, R25, C13, D15, C14, R26 |
| Каскад управления | Q3, Q4, D12, D13, D24, D25, C12, R22, R24 |
| ШИМ-контроллер | R21, C9, C10, R11 |
| Цепь «медленного запуска» | C6, R16 |
| Питание ШИМ-контроллера | D18, C18, R31, C17 |
| Элементы цепи защиты от короткого замыкания на выходе выпрямителя | D2, D4, R1, R2, Q1, Q2, R6 |
| Элементы цепи защиты от превышения напряжения на выходе выпрямителя | D1, R3, Q1 |
| Формирователь сигнала Power Good | C22, D23, R36, R37, R26, Q7 |
| Выпрямитель +12 В | L1, L2, C28, C29, R41, R35, C21 |
| Выпрямитель -12 В | D19, D20, L1, L3, C22, R40 |
Схема имеет входную цепь, преобразователь напряжения, составной блок выходных выпрямителей, также включает в себя схему формирования сигнала Power Good и цепи стабилизации и защиты.
Рассмотрим подробнее составные части схемы.
Входная цепь состоит из предохранителя, терморезистора, входного фильтра синфазных и дифференциальных помех. Напряжение первичной электросети через заградительный фильтр T1, C1, C2, C3, С4 поступает на двухполупериодный мостовой выпрямитель, выполненный на диодах D5, D6, D7, D8. Элементы С10, С11, R17, R18 представляют собой фильтр сетевого выпрямителя.
Преобразователь напряжения. Нагрузкой фильтра является полумостовой регулируемый автогенераторый преобразователь, в состав которого входят: трансформатор Х1, переключающие транзисторы Q5, Q6, элементы С13, R25, D14, характеризующие свойства Q5, а также элементы С14, R26, D15, характеризующие свойства транзистора Q6. Следует заметить, что транзисторы Q5 и Q6 открываются попеременно.
Схема формирования сигнала Power Good организована на ключе Q7. Задержка сигнала осуществляется цепью С28, R36 и R37 на 0,3 … 0,8 с после появления напряжения +12 В.
Выходные выпрямители. В схеме (Рис. 6.) используются двухполупериодные схемы выпрямления. Элементы R33, C19 и R34, С20 представляют собой цепи, уменьшающие импульсные помехи, создаваемые источником при работе. Сглаживание пульсаций на выходе выпрямителей обеспечивается элементами L1, L2, L3, L4,С22–С30. Резисторы R39–R42 являются нагрузочными для режима холостого хода.
Цепи стабилизации и защиты. Транзисторы Q3, Q4, работающие в ключевом режиме, обеспечивают эффективное управление преобразователем на транзисторах Q5 и Q6. С помощью диодов D12, D13 осуществляется их защита Q3 и Q4 от режима «сквозных токов». Удержание выключенного состояния транзисторов осуществляется цепью D24, D25, С12. Узел, организованный на D2, R2, является датчиком коротких замыканий, D1 - защита от перенапряжения. Если одна из рассматриваемых ситуаций происходит, то транзистор Q1 закрывается, что приводит к увеличению тока через диод D4 и R16. Увеличение падения напряжения на R16 вызовет срабатывание компаратора «мертвой зоны», уменьшающего длительность выходных импульсов, а соответственно, и выходное напряжение. Защита от чрезмерных токов в преобразователе организована на элементах Т3, D9, D10, R12, С7. При подаче питания на микросхему, включается задающий генератор. Времязадающая цепь этого генератора образована элементами С9, R21. Пилообразное напряжение задающего генератора поступает на компаратор широтно-импульсного модулятора, устанавливая его в единичное состояние. При этом образуется передний фронт управляющих преобразователем сигналов.
Задание на моделирование в среде Micro - Cap
В работе исследуются технические характеристики схемы компьютерного блока питания. По согласованию с преподавателем выбирается один из пяти вариантов принципиальной схемы компьютерного блока питания: ±12В; ±5В; +3,3В. Для примера зададимся случаем, когда в схеме будет присутствовать только напряжение питания +12 В. Данное напряжение предназначено для питания двигателей дисковых накопителей и вентиляторов (отрицательное напряжение -12 В в данном случае в десять раз меньше основного, поэтому в схеме используются простые двухамперные диоды).
Перечень элементов общей схемы представлен в таблице 6.
Таблица 6
| Наименование элементов | Выбранный тип элементов | Номиналы | Количество в схеме |
| C1,C2 | К10–17 | 220 нФ | 2 |
| С3, C4, С23, С24 | $GENERIC | 47 нФ | 4 |
| C5, C7, C8, С11 C28, C29, С32 | $GENERIC | 100 нФ | 7 |
| C6, C10, С12, C13, C14, C16, С22, C30, C31 | $GENERIC | 10 нФ | 9 |
| С9, С18, С20, С21 | $GENERIC | 4,7 нФ | 4 |
| С17, С26, С27 | $GENERIC | 2,2 нФ | 3 |
| С15, С25 | $GENERIC | 1 нФ | 2 |
| С19 | $GENERIC | 2 нФ | 1 |
| D1 | 1N458A | ––––––– | 1 |
| D2, D3, D4 | 1N5194 | ––––––– | 3 |
| D5–D8 | GSIB1580 | ––––––– | 4 |
| D9, D13, D14, D18, D21-D24 | BZX585-B2V7 | ––––––– | 8 |
| D10, D11, D15, D16 | UF5400 | ––––––– | 4 |
| D12, D17, D19, D20 | FR102 | ––––––– | 4 |
| L1–L4 | $GENERIC | ––––––– | 4 |
| Q1–Q6 | $GENERIC | ––––––– | 6 |
| R1, R31, R11 | МЛТ±5% | 1 кОм | 3 |
| R2, R3, R10, R30 | МЛТ±5% | 2 кОм | 4 |
| R3, R9, R31 | МЛТ±5% | 270 кОм | 3 |
| R4, R5 | МЛТ±5% | 9,1 кОм | 2 |
| R6, R7, R8, R20, R36, R37, R41, | МЛТ±5% | 5,1 кОм | 7 |
| R12, R13, R47 | МЛТ±5% | 330 Ом | 2 |
| R14–R15 | МЛТ±5% | 100 кОм | 4 |
| R16–R19, | МЛТ±5% | 220 кОм | 4 |
| R21 | МЛТ±5% | 6,2 кОм | 1 |
| R22, R40 | МЛТ±5% | 3,9 кОм | 2 |
| R23, R24, R26, R44 | МЛТ±5% | 1,5 кОм | 4 |
| R25, R36 | МЛТ±10% | 39 Ом | 2 |
| R27, R33, R43 | МЛТ±5% | 330 кОм | 4 |
| R28, R29, R34 | МЛТ±5% | 2,2 кОм | 3 |
| R32, R35, R39 | МЛТ±5% | 100 Ом | 3 |
| R33, R38, R42, R45 | МЛТ±5% | 18 кОм | 4 |
| R46 | МЛТ±5% | 47 кОм | 1 |
| W1–W3 | $GENERIC | 1 Гн | 3 |
Анализ по постоянному току
Для анализа схемы, исследуемой в среде Micro-Cap, выбираем вкладку Анализ по постоянному току ( DC) в данной программе. В появившемся окне Установки анализа по постоянному току выбираем требуемые параметры, при которых значения выбранного анализа задаются с учетом характеристик схемы. Для этого в строке Variable 1 устанавливаем следующие параметры: Method=Auto, Name=Vl, Range=10,0,.5. В нижней части окна задать параметры графика АПХ: Выражение по оси X=V(l), Выражение по оси Y =V(2), Масштаб оси X–AutoAlways, Масштаб по оси Y –AutoAlways. Для выполнения анализа следует нажать на кнопку Запустить. Окно анализа по постоянному току и результат анализа представлен на рис. 7. и рис. 8. соответственно.
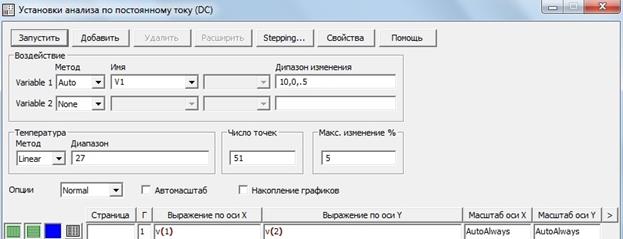
Рис. 7. Окно установки анализа по постоянному току (DC)
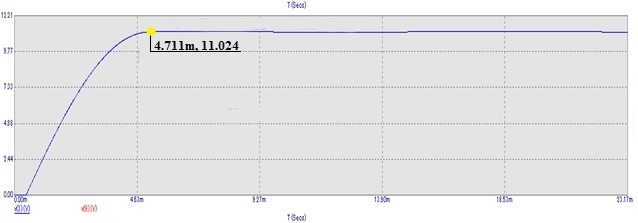
Рис. 8. Результат анализа по постоянному току (V(2)=f(V(1)) зависимость)
Определим и обозначим параметры точки излома АПХ, используя кнопку Точка перегиба на панели инструментов. Первое значение (по горизонтали) является искомой величиной, второй параметр соответствует координате по вертикали.
Расчет коэффициента стабилизации
Найдем коэффициент стабилизации схемы, определяемый по формуле:
где по формуле (2) определяется наклон АПХ:
Наклон АПХ определяется в окне результатов моделирования (Рис. 9.) при использовании двух перемещаемых курсоров в виде перекрестий линий, сопровождающихся показаниями координат их местоположения на графике. Курсоры могут быть точно установлены в заданные точки как по оси Y, так и по оси X. На панели инструментов выбираем Переход по X. И на экране появляется дополнительное окно Перейти к X, где нужно указать координату левого или правого курсора и нажать соответствующую кнопку (Left или Right).
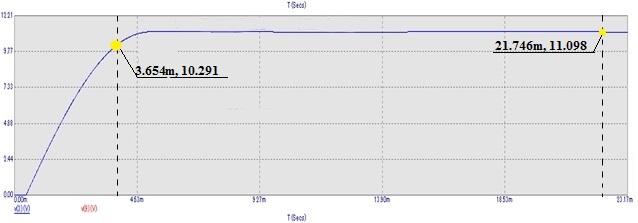
Рис. 9. Определение значений для расчета коэффициента стабилизации
По представленным параметрам рассчитаем коэффициент стабилизации схемы:

Далее по формуле определим КПД блока питания для шины +12 В:

Чтобы не перепутать значение Uвх со значением Uп, следует уточнить, что Uвх– это входное напряжение, подаваемое на шину +12В, а Uп– это напряжение питания, равное 220 В.
Анализ переходных процессов
Коэффициент сглаживания пульсаций можем определить по формуле:
где Uвх и Uвых – амплитуды пульсаций входного и выходного напряжений соответственно. Для определения амплитуд используем анализ переходных процессов. Для этого во вкладке Анализ выбираем Анализ переходных процессов. В настройках анализа выберем диапазон времени 100 мкс. В нижней части окна задать параметры графика: Выражение по оси X=Т, Выражение по оси Y =V(1);Выражение по оси X=Т, Выражение по оси Y =V(8) ;Масштаб оси X =AutoAlways, Масштаб по оси Y = AutoAlways. Для начала анализа нажать кнопку Запустить (Рис. 10.).
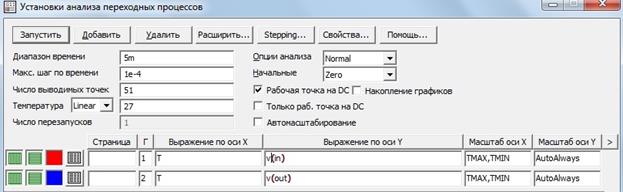
Рис. 10. Окно установки анализа переходных процессов (Transient)
В результате появятся графики зависимости v(in)=f(t) и v(out)=f(t). Чтобы определить амплитуды входного и выходного сигналов следует воспользоваться функцией определения глобального максимума и минимума.
Полученная характеристика представлена на рис. 11. По данным осциллограммам определим амплитуды сигналов:
Uвх=10,034–0=10,034;
Uвых=9,731–2,317=7,414;
Подставив значения в формулу (4), получаем результат:
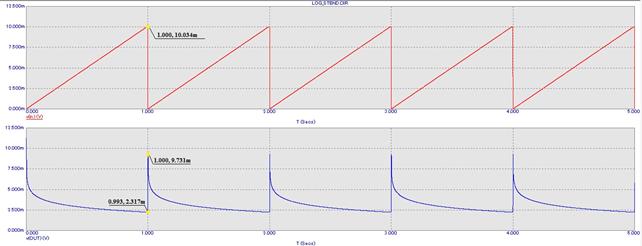
Рис. 11. Осциллограммы входных и выходных напряжений
Дата: 2019-11-01, просмотров: 365.