Электропитание радиоэлектронных и телекоммуникационных средств
Методические указания к лабораторным работам по дисциплинам
«Электропреобразовательные устройства РЭС», «Устройства питания РЭС», «Электропитание устройств и систем телекоммуникаций»
для студентов, обучающихся по направлениям 11.03.01 «Радиотехника»,
11.03.02 «Инфокоммуникационные технологии и системы связи» и студентов специальности 11.05.01 «Радиоэлектронные системы и комплексы»
2018
Ижевск
УДК 621.391
Составитель
Ю.К. Шелковников, докт. техн. наук, профессор
Рекомендовано Ученым советом Приборостроительного факультета к использованию в качестве учебно-методических материалов для использования в учебном процессе для направлений 11.03.01 «Радиотехника», 11.03.02 «Инфокоммуникационные технологии и системы связи» и студентов специальности 11.05.01 «Радиоэлектронные системы и комплексы» (протокол № ____ от _________2018г.).
Электропитание радиоэлектронных и телекоммуникационных средств: методические указания к лабораторным занятиям / сост. Ю.К. Шелковников. – Ижевск: ИжГТУ имени М.Т. Калашникова, 2018. – 65с.
Методические указания предназначены для организации подготовки студентов по направлениям 11.03.01 «Радиотехника», 11.03.02 «Инфокоммуникационные технологии и системы связи» и студентов специальности 11.05.01 «Радиоэлектронные системы и комплексы» при проведении лабораторных занятий по дисциплинам «Электропреобразовательные устройства РЭС», «Устройства питания РЭС», «Электропитание устройств и систем телекоммуникаций». Приведены контрольные вопросы, предлагаемые для проверки знаний о работе транзисторных схем стабилизаторов постоянного напряжения.
УДК 621.391
Содержание
Введение.............................................................................................................. 4
1. Компенсационные стабилизаторы напряжения............................................. 5
1.1. Цель работы.......................................................................................... 5
1.2. Краткие теоретические сведения.......................................................... 5
1.3. Задание на моделирование в среде Micro-Cap.................................... 6
1.4. Порядок выполнения работы............................................................ 17
1.5. Содержание отчета............................................................................. 18
1.6. Контрольные вопросы....................................................................... 18
2. Импульсные стабилизаторы напряжения.................................................... 19
2.1. Цель работы........................................................................................ 19
2.2. Краткие теоретические сведения........................................................ 19
2.3. Задание на моделирование в среде Micro-Cap.................................. 20
2.4. Порядок выполнения работы............................................................ 28
2.5. Содержание отчета............................................................................. 28
2.6. Контрольные вопросы....................................................................... 29
3. Тиристорные стабилизаторы напряжения................................................... 30
3.1. Цель работы........................................................................................ 30
3.2. Краткие теоретические сведения........................................................ 30
3.3. Задание на моделирование в среде Micro-Cap.................................. 32
3.4. Порядок выполнения работы............................................................ 39
3.5. Содержание отчета............................................................................. 39
3.6. Контрольные вопросы....................................................................... 39
4. Компьютерный блок питания....................................................................... 40
4.1. Цель работы........................................................................................ 40
4.2. Краткие теоретические сведения........................................................ 40
4.3. Задание на моделирование в среде Micro-Cap.................................. 52
4.4. Порядок выполнения работы............................................................ 61
4.5. Содержание отчета............................................................................. 61
4.6. Контрольные вопросы....................................................................... 61
Список литературы........................................................................................... 62
Введение
Методические указания предназначены для студентов направлений подготовки 11.03.01 «Радиотехника», 11.03.02 «Инфокоммуникационные технологии и системы связи» и студентов специальности 11.05.01 «Радиоэлектронные системы и комплексы» Приборостроительного факультета. Методические указания составлены в соответствии с программами курсов «Электропреобразовательные устройства РЭС», «Устройства питания РЭС», «Электропитание устройств и систем телекоммуникаций».
Целью лабораторного практикума является изучение работы различных схем компенсационных, импульсных и тиристорных стабилизаторов напряжения, закрепление и углубление теоретических знаний по их устройству и принципам действия, получение практических навыков расчетного исследования и схемотехнического моделирования источников вторичного электропитания.
Для проведения виртуальных лабораторных работ целесообразно использовать пакет схемотехнического моделирования Micro-Cap по следующим причинам.
1. В случае, если физическое моделирование невозможно из-за высокой сложности исследуемых устройств (например, при изучении интегральных схем и др.).
2. Физическое моделирование или макетирование связано с большими материальными затратами (например, ряд исследований можно провести однократно, после чего схема выходит из строя и др.).
3. С помощью пакета схемотехнического моделирования можно подключить виртуальные приборы к любой точке исследуемой схемы (в том числе, к внутренним точкам интегральных микросхем) и проанализировать эпюры сигналов (чего нельзя сделать в реальных интегральных схемах).
При задании схемы стабилизатора напряжения любым способом (графическим, текстовым) программа Micrо-Сap составляет собственную систему уравнений (полную математическую модель цепи), на основе которой и производится последующий анализ. Основные приемы работы с программой включают в себя следующие этапы: построение схемы в графическом редакторе; проведение анализа; представление результатов анализа.
В ходе выполнения лабораторных работ студенту необходимо в оболочке программы Micrо-Сap смоделировать схемы стабилизаторов напряжения, при этом значения элементов каждой из схем заранее рассчитаны и сведены в таблицы для более удобного использования.
Цель работы
Целью работы являются исследование принципа работы компенсационного стабилизатора, а также его моделирование в среде Micro-Cap.
Задание на моделирование в среде Micro-Cap
Определение параметров КСН
В ходе выполнения работы необходимо рассчитать коэффициент стабилизации, КПД, коэффициент сглаживания пульсаций, температурный коэффициент стабилизатора, внутреннее сопротивление стабилизатора по графикам смоделированных схем. Воспользовавшись пакетом программ Micro-Cap, получить графики зависимости выходного и входного сигналов от времени и температуры.
Задание на моделирование.
1. Создать схему КСН с дифференциальным усилителем постоянного тока в программе Micro-Cap с заранее известными параметрами ее элементов.
2. Построить график АПХ.
Использовать анализ по постоянному току DC. В окне DC Analysis Limits необходимо указать диапазон изменения входного напряжения. Для этого в строке Variable 1 установить: Method=Auto, Name=Vl, Range=40,0,0.1. В нижней части окна задать параметры графика АПХ: P=l, X Expression=V(l), Y Expression=V(2), X Range=Auto, Y Range=Auto. Запустить анализ кнопкой Run.
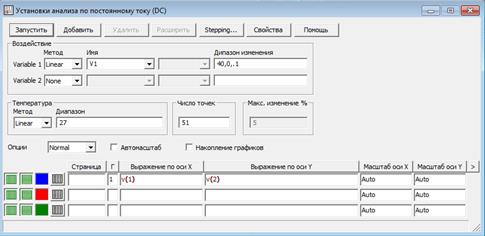
Рис. 2. Установки анализа по постоянному току
На экране появляется график зависимости V(2)=f(V(l)). Для определения минимального допустимого входного напряжения стабилизатора найдем и обозначим параметры точки излома АПХ, используя кнопку Tag Mode на панели инструментов. Первое значение соответствует координате по горизонтали и принимается как искомая величина, второе значение соответствует координате по вертикали и является выходным напряжением стабилизатора в рабочем режиме.
Коэффициент стабилизации.
Найти коэффициент стабилизации схемы, определяемый в виде
|
|
где  – наклон АПХ.
– наклон АПХ.
Наклон АПХ определяется в окне результатов моделирования при использовании двух перемещаемых курсоров в виде перекрестий линий, сопровождающихся показаниями координат их местоположения на графике. Курсоры могут быть точно установлены в заданные точки как по оси Y, так и по оси X. Воспользуемся управлением по оси X. Для этого нажимается кнопка Go to X (Идти в точку X) и на экране появляется дополнительное окно Go to X, где нужно указать координату левого или правого курсора и нажать соответствующую кнопку (Left или Right). По окончании перемещения курсоров экрана окно закрыть кнопкой Close. При этом в нижней части экрана выводятся координаты точек по осям в колонках Left (Левая) и Right (Правая). В колонке Delta (Разность) приводится разница координат точек по осям, а в колонке Slope (Наклон) в первой строке указывается наклон АПХ, рассчитанный по точкам пересечения, а во второй строке - единичное значение.
Для перемещения курсоров в рабочую часть АПХ можно использовать мышь. Курсор мыши выводится в точку АПХ, где должен находиться, например, левый курсор экрана, затем нажимается левая кнопка мыши, и курсор экрана занимает положение курсора мыши. Для перемещения правого курсора экрана необходимо использовать правую кнопку мыши. После считывания показания Slope выполняется расчет коэффициента стабилизации.
Метод Монте-Карло.
Реальные компоненты электронных схем всегда имеют определенный разброс параметров. Поэтому важной задачей автоматизированного анализа электронных схем является исследование поведения схемы в случае, когда ее параметры имеют разброс, а не жестко заданы. Как правило, это заключительный этап анализа, выполняемый после того, как расчеты при фиксированных (номинальных) значениях параметров уже проведены. Для проведения анализа методом Монте-Карло необходимо задать разброс параметров пассивных элементов схемы. Реализуем это на примере резистора R1. Дважды щелкнем на резисторе левой кнопкой мыши и вызовем тем самым окно настройки компонента. В пункте MODEL пропишем RES1 и щелкнем клавишу Enter.
Рис. 7. Окно настройки компонента
Далее перейдем в меню Models в нижней левой части экрана. В поле пропишем команду RES1 RES (R=1 DEV=5%) – варьировать случайным разбросом сопротивление модели RES1 в пределах 5 % относительно номинала. Выполним аналогичную операцию для всех пассивных элементов цепи.
Рис. 8. Рабочее поле вкладки Models
Следующим шагом алгоритма является проведение анализа DC. В верхнем рабочем поле появится вкладка Monte-Carlo. Далее вызываем меню настройки анализа методом Монте-Карло, нажав на кнопку Options. Выбираем в нем распределение Гаусса (Gauss), количество опытов установим равным 100 (Number of). В окне Status выберем On. Нажав кнопку Get, вызовем меню функций, по которым будет проводиться анализ. В графе Function выберем параметр Slope. Нажимаем кнопку Ок.
Рис. 9. Окно настройки анализа методом Монте-Карло
Затем необходимо повторить DC анализ. На графике отобразятся итоги всех ста выборок. В меню настройки выбираем пункт Histograms  Add Histogram. На экране появится гистограмма распределений Slope.
Add Histogram. На экране появится гистограмма распределений Slope.
8. Построим графики АЧХ и ФЧХ.
Для запуска анализа необходимо войти в окно Analisis и запустить анализ частотных характеристик АС.В окне АС Analisis Limits необходимо установить диапазон частот Frequecy Range=1E8,1 (формат: максимальная частота, минимальная частота в Гц) и внизу указать в первой строке параметры графиков: P=l, X Expression=F, Y Expression=db(V(2)), X Range=Auto, Y Range=Auto; P=2, X Expression=F, Y Expression=ph(V(2)), X Range=Auto, Y Range=Auto. После запуска анализа на экране появится график АЧХ и ФЧХ.
9.Определяем выходное сопротивление стабилизатора.
Подключим к выходу вместо резистора нагрузки источник тока в направлении выходного тока стабилизатора и смоделируем выходную ВАХ. Используем анализ по постоянному току DC. В окне DC Analysis Limits необходимо указать диапазон изменения тока источника. Для этого в строке Variable 1 установить: Method=Auto, Name=Il, Range=40,0,.5. В нижней части окна задать параметры графика ВАХ: P=l, X Expression=I(Il), Y Expression=V(2), X Range=Auto, Y Range=Auto. Запустить анализ кнопкой Run.
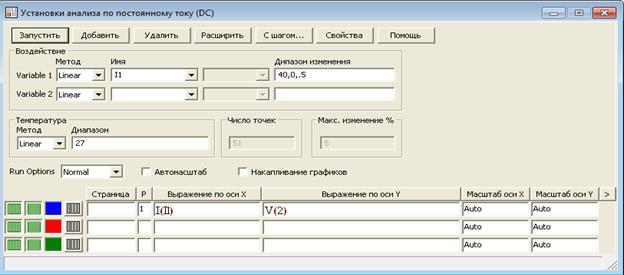
Рис.10. Установки анализа по постоянному току
Используя кнопку Go to X (идти в точку Х), указать координату левого или правого курсора, которая находится в рабочей зоне ВАХ стабилизатора. Регистрируем показания Slope. Модуль этого значения представляет собой выходное сопротивление стабилизатора Rвых.
Пример моделирования КСН в среде Micro-Cap
Исследуемая схема должна обеспечивать:
Работу в пределах заданного диапазона температуры окружающей среды -10 – 50 °С;
Заданный коэффициент пульсаций не более 1%;
Нестабильность выходного напряжения менее 3%;
Uн = (25 +5)В;
Iн = (4+0,5)А;
Нагрузка в пределах от 100 Ом до 2 кОм;
КПД не менее 50%;
Напряжение питания меняется не более чем на 10%;
Температурный коэффициент стабилизатора γ = 5 мВ/°С.
Порядок выполнения работы
1. Ознакомиться с целью работы, изучить теоретические сведения о программном пакете схемотехнического моделирования Micro-Cap и типовых стабилизаторах постоянного напряжения.
2. Получить задание у преподавателя на исследование конкретной схемы КСН.
3. Включить компьютер, войти в программную среду Micro-Cap и создать заданную схему.
4. Провести необходимый анализ схемы с помощью средств Micro-Cap, получить соответствующие графики (например, входного и выходного напряжений и др.), определить параметры схемы, сделать выводы.
5. Подготовить отчет о работе.
Содержание отчета
1. Введение.
2. Цель работы.
3. Задание на моделирование.
4. Краткие теоретические сведения о полученных в задании схемах.
5. Анализ схем с помощью пакета Micro-Cap и интерпретация полученных результатов.
6. Заключение.
7. Список литературы.
1.6. Контрольные вопросы
1. Каковы преимущества схемотехнического моделирования с применением программных средств по сравнению с физическим экспериментом?
2. Что представляют собой математические модели радиоэлектронного объекта и его компонентов?
3. Основные характеристики программного пакета Micro-Cap.
4. Общие сведения о программе расчета параметров моделей аналоговых компонентов Model в пакете Micro-Cap.
5. Как создается схема в среде Micro-Cap?
6. Какие виды анализа схемотехнических устройств можно провести с помощью программы Micro-Cap.
7. Что представляют собой параметры источников вторичного электропитания?
8. Каковы достоинства и недостатки источников электропитания с непрерывным и импульсным регулированием?
9.Нарисуйте структурную схему КСН и объясните принцип ее работы?
10.Напишите формулу коэффициента стабилизации, поясните его назначение.
Цель работы
Целью работы являются исследование принципа работы импульсного стабилизатора, а также его моделирование в среде Micro-Cap.
Задание на моделирование в среде Micro-Cap
Порядок выполнения работы
1. Ознакомиться с целью работы, изучить теоретические сведения о программном пакете схемотехнического моделирования Micro-Cap и типовых стабилизаторах постоянного напряжения.
2. Получить задание у преподавателя на исследование конкретной схемы ИСН.
3. Включить компьютер, войти в программную среду Micro-Cap и создать заданную схему.
4. Провести необходимый анализ схемы с помощью средств Micro-Cap, получить соответствующие графики (например, входного и выходного напряжений и др.), определить параметры схемы, сделать выводы.
5. Подготовить отчет о работе.
Содержание отчета
1. Введение.
2. Цель работы.
3. Задание на моделирование.
4. Краткие теоретические сведения о полученных в задании схемах.
5. Анализ схем с помощью пакета Micro-Cap и интерпретация полученных результатов.
6. Заключение.
7. Список литературы.
2.6. Контрольные вопросы
1. Каковы преимущества схемотехнического моделирования с помощью программных средств по сравнению с физическим экспериментом?
2. Что представляют собой математические модели радиоэлектронного объекта и его компонентов?
3. Основные характеристики программного пакета Micro-Cap.
4. Общие сведения о программе расчета параметров моделей аналоговых компонентов Model в пакете Micro-Cap.
5. Как создается схема в среде Micro-Cap?
6. Какие виды анализа схемотехнических устройств можно провести с помощью программы Micro-Cap.
7. Что представляют собой параметры источников вторичного электропитания?
8. Каковы достоинства и недостатки источников электропитания с непрерывным и импульсным регулированием?
9. Понятие об импульсном стабилизаторе напряжения. Поясните принцип его действия.
10. Что представляют собой основные параметры ИСН?
Тиристорные стабилизаторы
Цель работы
Целью работы являются исследование принципа работы тиристорного стабилизатора, а также его моделирование в среде Micro-Cap.
Задание на моделирование в среде Micro-Cap
В ходе лабораторной работы требуется провести исследования тиристорного стабилизатора напряжения с представленными в таблице 1 параметрами.
Таблица 1
| Напряжение питания сети | 220 В |
| Частота сети | 50 Гц |
| Номинальное значение выходного напряжения | Uн = 35 В |
| Ток нагрузки | Iн = 11 А |
| Нестабильность выходного напряжения при изменении питающего напряжения и температуры окружающей среды | δUн < ± 10% |
| Амплитуда пульсаций на выходе сглаживающего фильтра | Uн~ = 1 В |
| Максимальная температура окружающей среды | Tc = 50 ºC |
Моделирование принципиальной схемы тиристорного стабилизатора (рис.2) осуществляется в среде MicroСap. Составные элементы схемы их наименования, выбранные типы, номиналы и количества представлены в перечне элементов (таблица 2).
Рис. 2. Принципиальная схема ТСН
Перечень элементов схемы Таблица 2
 № варианта
Компоненты № варианта
Компоненты
| 1 | 2 | 3 | 4 | 5 |
| Uн | 29 В | 32 В | 35 В | 38 В | 41 В |
| Iн | 15 А | 13 А | 11 А | 9 А | 7 А |
| С1,С3,С5 | 1 мФ | 1 мФ | 1 мФ | 1 мФ | 1 мФ |
| С2,С4,С6 | 3,9 мФ | 3,9 мФ | 3,9 мФ | 3,9 мФ | 3,9 мФ |
| R2,R5,R9 | 1,5 кОм | 1,5 кОм | 1,5 кОм | 1,5 кОм | 1,5 кОм |
| R1,R6,R10 | 100 Ом | 100 Ом | 100 Ом | 100 Ом | 100 Ом |
| R3,R7,R11 | 83 Ом | 87 Ом | 91 Ом | 95 Ом | 100 Ом |
| R4,R8,R12 | 610 Ом | 629 Ом | 640 Ом | 680 Ом | 700 Ом |
| R13 | 489 Ом | 503 Ом | 510 Ом | 530 Ом | 540 Ом |
| R14 | 2,05 кОм | 2,12 кОм | 2,2 кОм | 2,33 кОм | 2,4 кОм |
| R15 | 13 Ом | 14,7 Ом | 16 Ом | 18,3 Ом | 19,5 Ом |
| R16 | 1,2 кОм | 1,31 кОм | 1,5 кОм | 2 кОм | 2,3 кОм |
| R17 | 11,8 Ом | 12,5 Ом | 13,3 Ом | 16 Ом | 17,9 Ом |
| R18 | 465 Ом | 472 Ом | 490 Ом | 586 Ом | 598 Ом |
| R19 | 920 Ом | 970 Ом | 1 кОм | 1.2 кОм | 1,31 кОм |
| R20 | 980 Ом | 1 кОм | 1,1 кОм | 1,5 кОм | 1,6кОм |
| R21 | 376 Ом | 385 Ом | 390 Ом | 397 Ом | 399 Ом |
| R22 | 78 Ом | 80 Ом | 82 Ом | 90 Ом | 95 Ом |
| R23 | 1 кОм | 1,05 кОм | 1,1 кОм | 1,3 кОм | 1,5 кОм |
| R24 | 1,9 кОм | 2,3 к Ом | 2,7 кОм | 3,2 кОм | 3,7 кОм |
| L | 0,03 Гн | 0,03 Гн | 0,03 Гн | 0,03 Гн | 0,03 Гн |
| VD1,VD3,VD5 | КД2989А | КД2989А | КД2989А | КД2989А | КД2989А |
| VD2,VD4,VD6 | Д226А | Д226А | Д226А | Д226А | Д226А |
| VD7 | КД202Д | КД202Д | КД202Д | КД202Д | КД202Д |
| VD8 | Д226 | Д226 | Д226 | Д226 | Д226 |
| VD9 | КД206А | КД206А | КД206А | КД206А | КД206А |
| VD10 | Д814А | Д814А | Д814А | Д814А | Д814А |
| VT1,VT2,VT3 | КП303 | КП303 | КП303 | КП303 | КП303 |
| VT4 | КТ808А | КТ808А | КТ808А | КТ808А | КТ808А |
| VT5 | КТ630А | КТ630А | КТ630А | КТ630А | КТ630А |
| VT6 | КТ208А | КТ208А | КТ208А | КТ208А | КТ208А |
| VT7 | КТ208Г | КТ208Г | КТ208Г | КТ208Г | КТ208Г |
| VS1,VS2,VS3 | 2N6506 | 2N6506 | 2N6506 | 2N6506 | 2N6506 |
По согласованию с преподавателем выбирается номер варианта исследуемой схемы, осуществляется ее создание в среде Micro-Cap. Для исследования тиристорного стабилизатора напряжения выполняется анализ по постоянному току, анализ переходных процессов и динамический анализ по постоянному току (по результатам анализа строятся характеристики и рассчитываются основные параметры ТСН).
1. Анализ по постоянному току (график АПХ, расчет Кст, КПД).
Построение графика АПХ.
Используется анализ по постоянному току DC. В окне Micro-Cap выбирается вкладка Анализ-Анализ по постоянному току. В появившемся окне необходимо указать диапазон изменения входного напряжения. Для этого в строке Variable1 установить: Method= Auto, Name= Vl, Range=16,0,0.1. В нижней части окна задать параметры графика АПХ: P=l, (выражение по оси Х) X Expression=V(l), (выражение по оси Y) YExpression=V(26), (масштаб оси) X Range= AutoAlways, (Масштаб по оси Y) YRange= AutoAlways. Запустить анализ кнопкой Run (рис. 3).
Рис. 3. Установки анализа по постоянному току
На экране появляется график зависимости V(26)= f( V( l)) (Рис.4). Для того, чтобы определить минимальное допустимое входное напряжения стабилизатора, найдем и обозначим параметры точки излома АПХ, используя кнопку TagMode (Точка перегиба) на панели инструментов. Первое значение соответствует координате по горизонтали и принимается как искомая величина, второе значение соответствует координате по вертикали и является выходным напряжением стабилизатора в рабочем режиме.

|

Рис 4. Точка перелома графика
Коэффициент стабилизации схемы определяется в виде:
 , (1)
, (1)
где  – наклон АПХ.
– наклон АПХ.
Наклон АПХ определяется в окне результатов моделирования при использовании двух перемещаемых курсоров в виде перекрестий линий, сопровождающихся показаниями координат их местоположения на графике. Курсоры могут быть точно установлены в заданные точки как по оси Y, так и по оси X. На панели инструментов выбираем Goto X (Перейти в точку X). На экране появляется дополнительное окно Goto X, где нужно указать координату левого или правого курсора и нажать соответствующую кнопку (Left или Right). По окончании перемещения курсоров экрана окно закрыть кнопкой Close. При этом в нижней части экрана выводятся координаты точек по осям в колонках Левая и Правая. В колонке Delta (Разность) приводится разница координат точек по осям, а в колонке Slope (Наклон) в первой строке указывается наклон АПХ, рассчитанный по точкам пересечения, а во второй строке - единичное значение.
Для перемещения курсоров в рабочую часть АПХ можно использовать мышь. Курсор мыши выводится в точку АПХ, где должен находиться, затем нажимается левая кнопка мыши, и курсор экрана занимает положение курсора мыши. Для перемещения правого курсора экрана необходимо использовать правую кнопку мыши.
Установим левый курсор экрана в точку Х=12, а правый - в точку Х=16. Регистрируем показания Slope и выполняем расчет коэффициента стабилизации.
2. Анализ переходных процессов ( коэффициент сглаживания пульсаций).
Коэффициент сглаживания пульсаций определяется по формуле:
 , (2)
, (2)
где Uвх, Uвых – амплитуды пульсаций входного и выходного напряжений стабилизатора соответственно. Для определения амплитуд воспользуемся Анализом переходных процессов ( Transient Analysis). В настройках анализа выберем диапазон времени 100мкс. В нижней части окна задаем параметры графика: P=l, X Expression=Т (выражение по оси Х), Y Expression=V(1) (выражение по оси Y), X Range=AutoAlways (масштаб по оси Х), Y Range=AutoAlways (масштаб по оси Y); P=2, X Expression=Т, Y Expression=V(2), X Range=Auto, Y Range=Auto. Запустить анализ кнопкой Run.
Рис 5. Установки анализа переходных процессов
3. Динамический анализ по постоянному току (температурный коэффициент стабилизатора; внутреннее сопротивление стабилизатора).
Температурный коэффициент стабилизатора.
Данный коэффициент равен отношению приращения выходного напряжения к приращению температуры окружающей среды , при неизменном входном напряжении и токе нагрузки (  :
:
 .
.
Для определения температурного коэффициента воспользуемся динамическим анализом по постоянному току (Dynamic DC). С этой целью во вкладке Анализ выбираем Динамический анализ по постоянному току. Определим напряжение выхода при температуре -10°С и 50°С.
Рис 6. Установки динамического DC анализа
Далее необходимо отобразить узловые потенциалы на нашей схеме. Для этого нажмём на кнопку  . Для запуска анализа нажмём «Ок». Зарегистрируем потенциал на выходе, т.е. под точкой «26».
. Для запуска анализа нажмём «Ок». Зарегистрируем потенциал на выходе, т.е. под точкой «26».
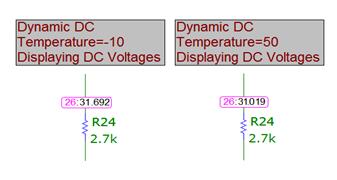
а) б)
Рис. 7. Динамический DC анализ: а – Т=-10°С; б – Т=50°С
Подставляя полученные значения в формулу (3), получим значение ТКН.
Внутреннее сопротивление стабилизатора ri, определяется как отношение приращения выходного напряжения ∆Uвых к приращению тока нагрузки ∆IН, при неизменном входном напряжении Uвх=const:
ri =∆Uвых /∆Iн.
Зная внутреннее сопротивление стабилизатора, можно определить изменение выходного напряжения при изменении тока нагрузки. В стабилизаторах напряжения внутреннее сопротивление может достигать тысячных долей ома.
Для определения внутреннего сопротивления стабилизатора воспользуемся динамическим анализом по постоянному току(dynamic DC). Далее необходимо измерить значения тока и напряжения в нагрузке, так же зафиксировать их изменения при изменении сопротивления нагрузки. В установках анализа укажем комнатную температуру (т.е. 27°С). Нажмём на кнопки, позволяющие отобразить токи и узловые потенциалы.
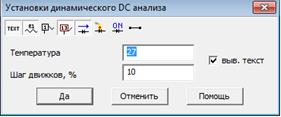
Рис. 8. Установки динамического DC анализа
На основе полученных данных находим внутреннее сопротивление стабилизатора.
4. Метод Монте-Карло.
На данном этапе осуществляется построение графика зависимости выходного напряжения от разброса номиналов элементов схемы (анализ Монте-Карло). Необходимость снятия этой зависимости обуславливается тем, что в результате старения элементов и произвольным дрейфом параметров отдельных ее элементов (транзисторов, конденсаторов, резисторов и т.п.) происходит разброс номиналов элементов схемы. Таким образом, анализ Монте-Карло позволяет рассматривать работу математической модели схемы, максимально приближенной к реальным условиям.
Для проведения анализа методом Монте-Карло необходимо задать разброс параметров пассивных элементов схемы. Проделаем это на примере резистора R1. Дважды щелкнем на резисторе левой кнопкой мыши и вызовем тем самым окно настройки компонента. В пункте MODEL пропишем RES1 и щелкнем клавишу Enter. Далее пройдем в меню Models в нижней левой части экрана. В поле пропишем команду RES1 RES (R=1 DEV=10%). Что означает – варьировать случайным разбросом сопротивление модели RES1 в пределах 10 % относительно номинала. Проделаем аналогичную операцию для всех пассивных элементов цепи.
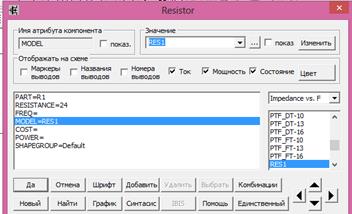
Рис.9.Окно «Resistors»
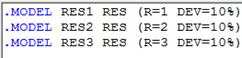
Рис.10. Рабочее поле вкладки «Models»
Следующим шагом является проведение Анализа по постоянному току . В верхнем рабочем поле появиться вкладка Монте-Карло (Рис. 15). Далее вызываем меню настройки анализа методом Монте-Карло, нажав на кнопку Опции. Выберем в нем распределение Гаусса ( Gauss), Число вариантов установим равным 300 . В окне Статус выберем Вкл. Нажав кнопку Get, вызовем меню функций, по которым будет проводиться анализ. В графе Function выберем параметр Slope. Нажимаем кнопку Да.

Рис.11. Вкладка «Монте-Карло»
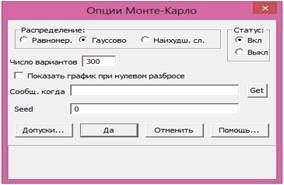
Рис.12. Окно «Опции Монте-Карло»
Затем необходимо повторить DC анализ. На графике отобразятся итоги всех трехста выборок. В меню настройки выбираем пункт Histograms  Add Histogram. На экране появится гистограмма распределений Slope (рис.13).
Add Histogram. На экране появится гистограмма распределений Slope (рис.13).
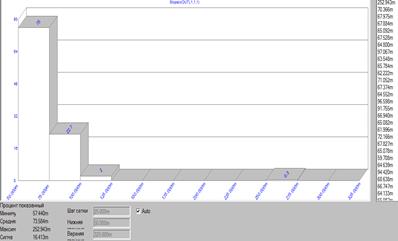
Рис.13.Гистограмма распределений
Порядок выполнения работы
1. Ознакомиться с целью работы, изучить теоретические сведения о программном пакете схемотехнического моделирования Micro-Cap и типовых стабилизаторах постоянного напряжения.
2. Получить задание у преподавателя на исследование конкретной схемы ТСН.
3. Включить компьютер, войти в программную среду Micro-Cap и создать заданную схему.
4. Провести необходимый анализ схемы с помощью средств Micro-Cap, получить соответствующие графики (например, входного и выходного напряжений и др.), определить параметры схемы, сделать выводы.
5. Подготовить отчет о работе.
Содержание отчета
1. Введение.
2. Цель работы.
3. Задание на моделирование.
4. Краткие теоретические сведения о полученных в задании схемах.
5. Анализ схем с помощью пакета Micro-Cap и интерпретация полученных результатов.
6. Заключение.
7. Список литературы.
3.6. Контрольные вопросы
1. Каковы преимущества схемотехнического моделирования с помощью программных средств по сравнению с физическим экспериментом?
2. Что представляют собой математические модели радиоэлектронного объекта и его компонентов?
3. Основные характеристики программного пакета Micro-Cap.
4. Общие сведения о программе расчета параметров моделей аналоговых компонентов Model в пакете Micro-Cap.
5. Как создается схема в среде Micro-Cap?
6. Какие виды анализа схемотехнических устройств можно провести с помощью программы Micro-Cap.
7. Что представляют собой параметры источников вторичного электропитания?
8. Каковы достоинства и недостатки источников электропитания с непрерывным и импульсным регулированием?
9. Опишите работу тиристора по его эквивалентной схеме и ВАХ.
10. Нарисуйте структурную схему ТСН, поясните принцип работы стабилизатора.
Компьютерный блок питания
Цель работы
Целью работы являются исследование принципа работы и внутреннего устройства компьютерного блока питания, а также его моделирование в среде Micro-Cap.
Введение
Блок питания – вторичный источник электропитания, предназначенный для снабжения узлов персонального компьютера (ПК) электрической энергией постоянного тока, путём преобразования сетевого напряжения до требуемых значений. Основное назначение блока питания – это формирование напряжений питания, необходимых для функционирования всех блоков ПК. Основные напряжения питания компонентов: 12В; 5В; 3,3В. В настоящее время используемые в электронной аппаратуре блоки питания можно разделить на нестабилизированные и стабилизированные. В свою очередь, стабилизированные блоки питания можно разделить на два класса (по типу используемого стабилизатора): линейные и импульсные. Более подробно рассмотрим именно импульсные вторичные источники электропитания, так как они и применяются в компьютерах.
Приблизительно до 1980-х годов источники питания были тяжелые и большие. В них для преобразования напряжения электрической сети 220 В частотой 50 Гц в напряжения 5 В и 12 В постоянного тока использовались большие тяжелые трансформаторы и большие конденсаторы.
Использующиеся для этих целей в настоящее время импульсные источники питания значительно меньше и легче. Они преобразуют электрический ток частотой 50 Гц в ток более высокой частоты. Благодаря такому преобразованию для понижения напряжения с 220 В до напряжений, требующихся для отдельных компонентов компьютера, можно использовать маленький легкий высокочастотноый трансформатор. Переменный ток более высокой частоты, поступающий из блока питания, легче выпрямлять и фильтровать (по сравнению с исходным напряжением сети переменного тока 50 Гц), что позволяет уменьшить пульсации питающего напряжения для чувствительных электронных компонентов компьютера.
На Рис. 1. приведена структурная схема компьютерного импульсного блока питания (КИБП).

Рис. 1. Блок питания КИБП
Выпрямитель, фильтр и стабилизатор, имеющиеся во вторичной цепи такого источника питания, построены на основе узлов, встречающихся в обычных источниках электропитания. Названия этих узлов раскрывает их назначение и не нуждается в пояснении. Способ реализации стабилизатора (линейный или импульсный) в данном случае не так важен по сравнению с его присутствием в качестве отдельного функционального узла. Вторичная цепь электропитания в различных вариантах исполнения источника может быть дополнена еще одним фильтром, который устанавливается между стабилизатором и нагрузкой. Основными узлами первичной цепи являются: входной фильтр, выпрямитель сетевого напряжения и ВЧ преобразователь выпрямленного питающего напряжения с трансформатором TV.
Необходимость использования входного фильтра обусловлена следующим. Во-первых, этот фильтр должен устранять резкие кратковременные скачки питающего напряжения и импульсные помехи, вызванные работой расположенных поблизости импульсных устройств (ВЧ помехи) или возникающие в момент подключения или отключения от сети смежных нагрузок. Во-вторых, фильтр должен эффективно устранять помехи, проникающие в сеть непосредственно от используемого источника питания.
ВЧ трансформаторы, применяемые в ИБП, являются преобразователями импульсных колебаний с полосой частот до нескольких МГц. Передача энергии трансформатором имеет двухсторонний характер. В направлении сеть – нагрузка происходит передача колебаний ВЧ преобразователя. В обратном же направлении, то есть нагрузка – преобразователь – сеть, могут передаваться помехи, возникающие при работе нагрузочных цепей. Если, например, ИБП установлен в вычислительной системе, то эти помехи могут содержать элементы информационных составляющих обрабатываемых данных. Причем, как правило, в направлении сеть – нагрузка трансформатор действует как понижающий, и, следовательно, в обратном направлении он работает как повышающий. Если входной фильтр не установлен, то помехи, возникающие непосредственно в устройстве, будут эффективно транслироваться в сеть с частью информационной составляющей. Таким образом, входной фильтр применяется не только для устранения паразитного эффекта обратной трансформации, но и для защиты от утечки информации.
В импульсном источнике питания (Рис. 1.) используется каскад ВЧ преобразователя автогенераторного типа, режим автоколебаний которого определяется только значением номиналов его собственных элементов и не регулируется. Такой источник питания может дополнительно включать в себя датчик перегрузки, который воздействует либо на стабилизатор, либо на ВЧ преобразователь, блокируя его работу до момента устранения причины неисправности. При правильном подборе элементной базы ИБП, изготовленный по данной схеме, прост в реализации – в этом его главное преимущество, однако из-за сравнительно низкого КПД используется редко. Падение КПД происходит при увеличении числа вторичных каналов различных напряжений, так как для каждого из них требуется отдельный стабилизатор напряжения. Существенным недостатком схемы может быть и очень высокая чувствительность автогенераторов, совмещенных с силовым каскадом ИБП, к величине нагрузки. Ее изменение может привести к срыву ВЧ колебаний и нестабильности работы источника питания подобного рода.
Алгоритм действия блока питания:
1. Сетевое напряжение сначала выпрямляется.
2. Заряжает конденсаторы фильтра.
3. Очищается от помех блоком PFC и преобразуется в синусоидальный сигнал с частотой 50-150 кГц.
4. Напряжение понижается до 5 и 12 В.
+3,3 В формируется с той же обмотки, что и +5 В, поэтому для любого блока указывается суммарная мощность каналов +3,3В и +5В.
Анализ структурной схемы
На примере блока Macropower MP-300AR (рис.3) показано расположение компонентов в реальном блоке питания.

Рис. 3. Блок питания Macropower MP-300AR
На рис.4 приведена упрощенная схема типичного компьютерного блока питания. Питающее напряжение 220В поступает на двух- или трехзвенный фильтр, защищающий другие включенные в сеть устройства от создаваемых блоком питания помех. После фильтра напряжение через выпрямитель D1 подается на схему коррекции фактора мощности (PFC – Power Factor Correction).
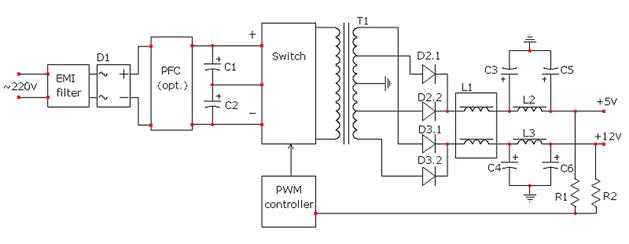
Рис. 4. Упрощенная схема компьютерного блока питания
Далее после схемы коррекции фактора мощности (или, в случае ее отсутствия непосредственно с диодного моста) выпрямленное напряжение поступает на сглаживающие конденсаторы C1 и C2, а с них – на ключ (обычно он представляет собой два транзистора), управляющий силовым трансформатором T1. Типичная частота работы ключа в компьютерном блоке питания – 30-35 кГц.
Так как блок питания имеет до шести выходных напряжений (±12В, ±5В, ±3,3В), то теоретически необходимо реализовать шесть стабилизаторов. На практике же расположить в ограниченном объеме блока питания даже два раздельных мощных стабилизатора (например, для +5В и +3,3В), при этом существенно увеличив его стоимость, практически невозможно. Поэтому во всех современных блоках используется лишь один импульсный стабилизатор (хотя фактически их два – источник +5В дежурного режима представляет из себя совершенно независимый маломощный стабилизатор, но благодаря малой мощности (всего 10 Вт), его реализация особой сложности не представляет).
Таким образом, все выходные напряжения, кроме +5В дежурного режима, снимаются с одного и того же трансформатора T1 (на блок-схеме для простоты показаны только два напряжения). Следует отметить, что во всех современных блоках при управлении ключами используется не частотная модуляция, а широтно-импульсная, когда при неизменной частоте следования импульсов меняется их ширина. Чем больше ширина импульса, тем больше энергии поступает в трансформатор за каждый период, и тем больше напряжение на его выходе.
Однако, если просто снимать сигнал обратной связи с одного из выходных напряжений, то блок будет стабилизировать только его. Например, пусть это будет +5В. Тогда при росте нагрузки на +5В напряжение на этом выходе начнет проседать, ШИМ-контроллер увеличит ширину импульсов, «вытягивая» его обратно на заданный уровень, и все остальные напряжения начнут повышаться. Для борьбы с этим эффектом используется сразу несколько решений.
1) Сигнал обратной связи снимается сразу с двух наиболее нагруженных выходных линий – с +12В и +5В, через резисторный делитель. Поэтому качество стабилизации каждого из напряжений по отдельности ухудшается, однако стабилизатор блока питания реагирует на изменение нагрузки не по одному, а сразу по двум напряжениям – и в результате блок питания нормально работает при различных распределениях нагрузки между этими двумя шинами.
2) Третья сильноточная шина, +3,3В, в большинстве блоков питания имеет собственный вспомогательный стабилизатор – так называемую схему на насыщаемом дросселе (также встречаются названия "магнитный стабилизатор" и "магнитный усилитель"). Стабилизаторы на насыщаемом дросселе отличаются достаточно высоким КПД и при этом сравнительно неплохим коэффициентом стабилизации, являясь разновидностью импульсных. Напряжение +3,3В формируется с тех же обмоток трансформатора, что и +5В.
3) Слаботочные шины, то есть -12В и -5В, иногда снабжают обычными линейными стабилизаторами – благодаря маленьким токам нагрузки по этим шинам невысокий КПД таких стабилизаторов в общий КПД блока питания вклада почти не вносит. Впрочем, так чаще стабилизируется только -5В – ради экономии на обмотках трансформатора оно получается из -12В с помощью линейного стабилизатора, а так как в современных блоках питания это напряжение уже не требуется, то и линейные стабилизаторы из блоков практически исчезли.
4) Все выходные напряжения проходят через разные обмотки так называемого дросселя групповой стабилизации L1. Допустим, увеличилось потребление по +5В, ШИМ-стабилизатор отреагировал на это увеличением ширины импульсов, напряжение +5В вернулось в норму, но остальные напряжения (нагрузка по которым не увеличилась) слегка выросли – хотя для них и применяются описанные выше дополнительные меры по стабилизации, все же основное внимание уделяется напряжению +5В. Однако дроссель групповой стабилизации сконструирован так, что при увеличении тока через одну из обмоток напряжение, наведенное этим током в остальных обмотках, вычитается из соответствующих выходных напряжений. Поэтому в рассматриваемом случае за счет увеличившегося тока через обмотку, соответствующую +5В, в обмотках, соответствующих +12В и +3,3В, возникнут отрицательные напряжения – и эти напряжения увеличатся не так сильно, как увеличились бы в отсутствие дросселя групповой стабилизации.
Энергопотребление видеокарт
Таблица 3
|
Задание на моделирование в среде Micro - Cap В работе исследуются технические характеристики схемы компьютерного блока питания. По согласованию с преподавателем выбирается один из пяти вариантов принципиальной схемы компьютерного блока питания: ±12В; ±5В; +3,3В. Для примера зададимся случаем, когда в схеме будет присутствовать только напряжение питания +12 В. Данное напряжение предназначено для питания двигателей дисковых накопителей и вентиляторов (отрицательное напряжение -12 В в данном случае в десять раз меньше основного, поэтому в схеме используются простые двухамперные диоды). Перечень элементов общей схемы представлен в таблице 6. Таблица 6
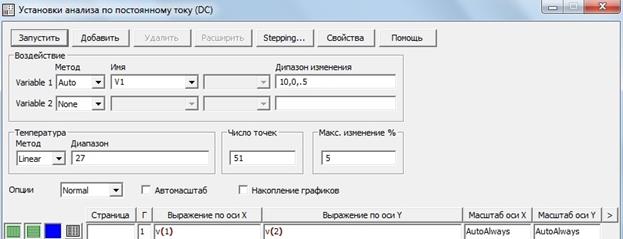
Анализ по постоянному току Для анализа схемы, исследуемой в среде Micro-Cap, выбираем вкладку Анализ по постоянному току ( DC) в данной программе. В появившемся окне Установки анализа по постоянному току выбираем требуемые параметры, при которых значения выбранного анализа задаются с учетом характеристик схемы. Для этого в строке Variable 1 устанавливаем следующие параметры: Method=Auto, Name=Vl, Range=10,0,.5. В нижней части окна задать параметры графика АПХ: Выражение по оси X=V(l), Выражение по оси Y =V(2), Масштаб оси X–AutoAlways, Масштаб по оси Y –AutoAlways. Для выполнения анализа следует нажать на кнопку Запустить. Окно анализа по постоянному току и результат анализа представлен на рис. 7. и рис. 8. соответственно.
Рис. 7. Окно установки анализа по постоянному току (DC)
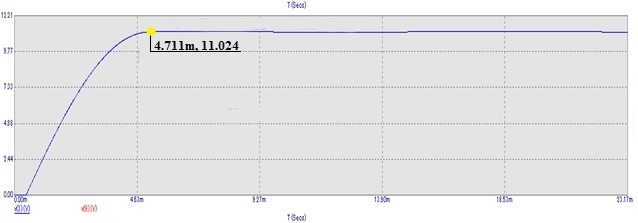
Рис. 8. Результат анализа по постоянному току (V(2)=f(V(1)) зависимость)
Определим и обозначим параметры точки излома АПХ, используя кнопку Точка перегиба на панели инструментов. Первое значение (по горизонтали) является искомой величиной, второй параметр соответствует координате по вертикали. Расчет коэффициента стабилизации Найдем коэффициент стабилизации схемы, определяемый по формуле:
где по формуле (2) определяется наклон АПХ:
Наклон АПХ определяется в окне результатов моделирования (Рис. 9.) при использовании двух перемещаемых курсоров в виде перекрестий линий, сопровождающихся показаниями координат их местоположения на графике. Курсоры могут быть точно установлены в заданные точки как по оси Y, так и по оси X. На панели инструментов выбираем Переход по X. И на экране появляется дополнительное окно Перейти к X, где нужно указать координату левого или правого курсора и нажать соответствующую кнопку (Left или Right).
Рис. 9. Определение значений для расчета коэффициента стабилизации
По представленным параметрам рассчитаем коэффициент стабилизации схемы:
Далее по формуле определим КПД блока питания для шины +12 В:
Чтобы не перепутать значение Uвх со значением Uп, следует уточнить, что Uвх– это входное напряжение, подаваемое на шину +12В, а Uп– это напряжение питания, равное 220 В.
Анализ переходных процессов Коэффициент сглаживания пульсаций можем определить по формуле:
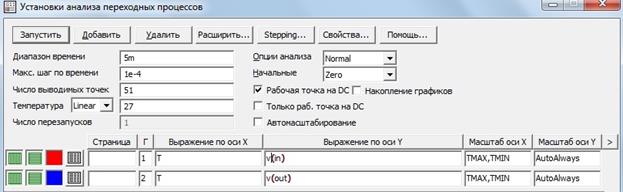
где Uвх и Uвых – амплитуды пульсаций входного и выходного напряжений соответственно. Для определения амплитуд используем анализ переходных процессов. Для этого во вкладке Анализ выбираем Анализ переходных процессов. В настройках анализа выберем диапазон времени 100 мкс. В нижней части окна задать параметры графика: Выражение по оси X=Т, Выражение по оси Y =V(1);Выражение по оси X=Т, Выражение по оси Y =V(8) ;Масштаб оси X =AutoAlways, Масштаб по оси Y = AutoAlways. Для начала анализа нажать кнопку Запустить (Рис. 10.).
Рис. 10. Окно установки анализа переходных процессов (Transient)
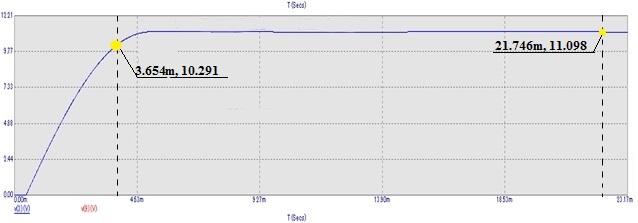
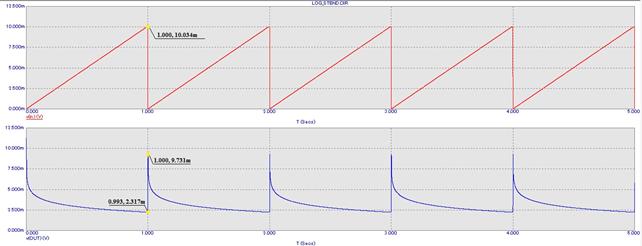
В результате появятся графики зависимости v(in)=f(t) и v(out)=f(t). Чтобы определить амплитуды входного и выходного сигналов следует воспользоваться функцией определения глобального максимума и минимума. Полученная характеристика представлена на рис. 11. По данным осциллограммам определим амплитуды сигналов: Uвх=10,034–0=10,034; Uвых=9,731–2,317=7,414; Подставив значения в формулу (4), получаем результат:
Рис. 11. Осциллограммы входных и выходных напряжений Порядок выполнения работы 1. Ознакомиться с целью работы, изучить теоретические сведения о программном пакете схемотехнического моделирования Micro-Cap и типовых стабилизаторах постоянного напряжения. 2. Получить задание у преподавателя на исследование конкретной схемы КБП. 3. Включить компьютер, войти в программную среду Micro-Cap и создать заданную схему. 4. Провести необходимый анализ схемы с помощью средств Micro-Cap, получить соответствующие графики (например, входного и выходного напряжений и др.), определить параметры схемы, сделать выводы. 5. Подготовить отчет о работе.
Содержание отчета 1. Введение. 2. Цель работы. 3. Задание на моделирование. 4. Краткие теоретические сведения о полученных в задании схемах. 5. Анализ схем с помощью пакета Micro-Cap и интерпретация полученных результатов. 6. Заключение. 7. Список литературы.
4.6. Контрольные вопросы 1. Каковы преимущества схемотехнического моделирования с помощью программных средств по сравнению с физическим экспериментом? 2. Что представляют собой математические модели радиоэлектронного объекта и его компонентов? 3. Основные характеристики программного пакета Micro-Cap. 4. Общие сведения о программе расчета параметров моделей аналоговых компонентов Model в пакете Micro-Cap. 5. Как создается схема в среде Micro-Cap? 6. Какие виды анализа схемотехнических устройств можно провести с помощью программы Micro-Cap. 7. Что представляют собой параметры источников вторичного электропитания? 8. Каковы достоинства и недостатки источников электропитания с непрерывным и импульсным регулированием? 9. Объясните работу компьютерного блока питания по его структурной схеме, поясните назначение ее составляющих. 10. Объясните работу компьютерного блока питания по его принципиальной схеме.
СПИСОК ЛИТЕРАТУРЫ 1. Алексеев О.В. Автоматизация проектирования радиоэлектронных средств. – М.: Высш. шк., 2000. – 479с. 2. Москатов Е.А. Источники питания. – К: «МК-Пресс», СПб.: «КОРОНА-ВЕК», 2011. – 208с. 3. Иванов-Цыганов А.И. Электропреобразовательные устройства РЭС.– М.: Высш. шк., 1991.– 272с. 4. Алексеев О.В., Китаев В.Е., Шихин А.Я. Электротехнические устройства.– М.: Энергоиздат, 1981. 5. Бокуняев А.А. и др. Электропитание устройств связи / Под ред. В.Е.Китаева.– М.: Радио и связь, 1988. 6. Китаев В.Е., Бокуняев А.А., Колканов М.Ф. Расчет источников электропитания устройств связи.– М.: Радио и связь, 1993. 7. Источники вторичного электропитания / С.С.Букреев, В.А.Головацкий, Г.Н.Гулякович и др.; Под ред. В.Е.Китаева.– М.: Радио и связь, 1983. 8. Источники электропитания РЭА: Справочник / Под ред. Г.С.Найвельта.– М.: Радио и связь, 1985. 9. Ромаш Э.М. и др. Высокочастотные транзисторные преобразователи.– М.: Радио и связь, 1988. 10. Сергеев Б.С. Схемотехника функциональных узлов источников вторичного электропитания.– М.: Радио и связь, 1992. 11. Костиков В.Г., Никитин И.Е. Источники электропитания высокого напряжения РЭА.– М.: Радио и связь, 1986. 12. Краус А.А. и др. Проектирование стабилизированных источников питания радиоэлектронной аппаратуры.– М.: Радио и связь, 1980. 13. Вересов Г.П. Стабилизированные источники питания радиоаппаратуры.– М.: Радио и связь, 1978. 14. Амелина М.А., Амелин С.А. Программа схемотехнического моделирования MicroCap 8 М.: Горячая линия – Телеком, 2007. – 466 с.
Учебное издание
Электропитание радиоэлектронных и телекоммуникационных средств
Методические указания к лабораторным работам по дисциплинам «Электропреобразовательные устройства РЭС», «Устройства питания РЭС», «Электропитание устройств и систем телекоммуникаций» для студентов, обучающихся по направлениям 11.03.01 «Радиотехника», 11.03.02 «Инфокоммуникационные технологии и системы связи» и студентов специальности 11.05.01 «Радиоэлектронные системы и комплексы»
2018 Ижевск УДК 621.391
Составитель Ю.К. Шелковников, докт. техн. наук, профессор
Рекомендовано Ученым советом Приборостроительного факультета к использованию в качестве учебно-методических материалов для использования в учебном процессе для направлений 11.03.01 «Радиотехника», 11.03.02 «Инфокоммуникационные технологии и системы связи» и студентов специальности 11.05.01 «Радиоэлектронные системы и комплексы» (протокол № ____ от _________2018г.).
Электропитание радиоэлектронных и телекоммуникационных средств: методические указания к лабораторным занятиям / сост. Ю.К. Шелковников. – Ижевск: ИжГТУ имени М.Т. Калашникова, 2018. – 65с.
Методические указания предназначены для организации подготовки студентов по направлениям 11.03.01 «Радиотехника», 11.03.02 «Инфокоммуникационные технологии и системы связи» и студентов специальности 11.05.01 «Радиоэлектронные системы и комплексы» при проведении лабораторных занятий по дисциплинам «Электропреобразовательные устройства РЭС», «Устройства питания РЭС», «Электропитание устройств и систем телекоммуникаций». Приведены контрольные вопросы, предлагаемые для проверки знаний о работе транзисторных схем стабилизаторов постоянного напряжения.
УДК 621.391
Содержание Введение.............................................................................................................. 4 1. Компенсационные стабилизаторы напряжения............................................. 5 1.1. Цель работы.......................................................................................... 5 1.2. Краткие теоретические сведения.......................................................... 5 1.3. Задание на моделирование в среде Micro-Cap.................................... 6 1.4. Порядок выполнения работы............................................................ 17 1.5. Содержание отчета............................................................................. 18 1.6. Контрольные вопросы....................................................................... 18 2. Импульсные стабилизаторы напряжения.................................................... 19 2.1. Цель работы........................................................................................ 19 2.2. Краткие теоретические сведения........................................................ 19 2.3. Задание на моделирование в среде Micro-Cap.................................. 20 2.4. Порядок выполнения работы............................................................ 28 2.5. Содержание отчета............................................................................. 28 2.6. Контрольные вопросы....................................................................... 29 3. Тиристорные стабилизаторы напряжения................................................... 30 3.1. Цель работы........................................................................................ 30 3.2. Краткие теоретические сведения........................................................ 30 3.3. Задание на моделирование в среде Micro-Cap.................................. 32 3.4. Порядок выполнения работы............................................................ 39 3.5. Содержание отчета............................................................................. 39 3.6. Контрольные вопросы....................................................................... 39 4. Компьютерный блок питания....................................................................... 40 4.1. Цель работы........................................................................................ 40 4.2. Краткие теоретические сведения........................................................ 40 4.3. Задание на моделирование в среде Micro-Cap.................................. 52 4.4. Порядок выполнения работы............................................................ 61 4.5. Содержание отчета............................................................................. 61 4.6. Контрольные вопросы....................................................................... 61 Список литературы........................................................................................... 62
Введение
Методические указания предназначены для студентов направлений подготовки 11.03.01 «Радиотехника», 11.03.02 «Инфокоммуникационные технологии и системы связи» и студентов специальности 11.05.01 «Радиоэлектронные системы и комплексы» Приборостроительного факультета. Методические указания составлены в соответствии с программами курсов «Электропреобразовательные устройства РЭС», «Устройства питания РЭС», «Электропитание устройств и систем телекоммуникаций». Целью лабораторного практикума является изучение работы различных схем компенсационных, импульсных и тиристорных стабилизаторов напряжения, закрепление и углубление теоретических знаний по их устройству и принципам действия, получение практических навыков расчетного исследования и схемотехнического моделирования источников вторичного электропитания. Для проведения виртуальных лабораторных работ целесообразно использовать пакет схемотехнического моделирования Micro-Cap по следующим причинам. 1. В случае, если физическое моделирование невозможно из-за высокой сложности исследуемых устройств (например, при изучении интегральных схем и др.). 2. Физическое моделирование или макетирование связано с большими материальными затратами (например, ряд исследований можно провести однократно, после чего схема выходит из строя и др.). 3. С помощью пакета схемотехнического моделирования можно подключить виртуальные приборы к любой точке исследуемой схемы (в том числе, к внутренним точкам интегральных микросхем) и проанализировать эпюры сигналов (чего нельзя сделать в реальных интегральных схемах). При задании схемы стабилизатора напряжения любым способом (графическим, текстовым) программа Micrо-Сap составляет собственную систему уравнений (полную математическую модель цепи), на основе которой и производится последующий анализ. Основные приемы работы с программой включают в себя следующие этапы: построение схемы в графическом редакторе; проведение анализа; представление результатов анализа. В ходе выполнения лабораторных работ студенту необходимо в оболочке программы Micrо-Сap смоделировать схемы стабилизаторов напряжения, при этом значения элементов каждой из схем заранее рассчитаны и сведены в таблицы для более удобного использования.
Дата: 2019-11-01, просмотров: 361.
Материалы представленные на сайте исключительно с целью ознакомления пользователям Интернета и не преследуют коммерческих целей или нарушение авторских прав.
© 2018 - 2026
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||