До складу розроблюємого пристрою входить первинний тахометричний перетворювач. Доцільно використати такий ТП, який буде мати аналоговий вихідний сигнал, прямо пропорційний куту повороту. Шляхом обчислення його першої похідной визначається кутова швидкість.
Аналогові диференціюючи пристрої мають велику похибку та вузький частотний діапазон, що не може задовільнити вимоги технічного завдання. Тому необхідно використати цифрове диференціювання вихідного сигналу ТП. Існують три види цифрового диференціювання [16]:
Перший тип - це дискретний диференціатор з усередненням. Принцип його дії полягає у відніманні через однакові інтервали часу миттєвих значень вхідного сигналу. Сигнал на виході диференціатора першого типу описується виразом
 (2.1)
(2.1)
де  - інтервал дискретності.
- інтервал дискретності.
Другий тип - це дискретний диференціатор з осередненням. У цьому диференціаторі віднімаються через однакові інтервали часу попередньо проінтегровані на цих інтервалах значення вхідного сигналу. Сигнал на виході диференціатора другого типу
 , (2.2)
, (2.2)
Цифровий диференціатор третього типу - це диференціатор з усередненням на частині інтервалу. У ньому віднімаються через однакові інтервали часу попередньо проінтегровані на частині цих інтервалів значення вхідного сигналу. Вихідний сигнал описується виразом
 , (2.3)
, (2.3)
Імпульсні характеристики диференціаторів першого, другого та третього типів описуються відповідно виразами
 , (2.4)
, (2.4)
 (2.5)
(2.5)
 , (2.6)
, (2.6)
де  - дельта-функція Дирака,
- дельта-функція Дирака, 
Провівши пряме перетворення Фур’є від імпульсних характеристик та відокремивши дійсну та мниму частини отримуємо частотні та фазові характеристики диференціаторів.
Для диференціатора першого типу
 , (2.7)
, (2.7)
 . (2.8)
. (2.8)
Для диференціаторів другого типу
 , (2.9)
, (2.9)
 . (2.10)
. (2.10)
Для диференціаторів третього типу
 , (2.11)
, (2.11)
 . (2.12)
. (2.12)
Вибір одного з цих трьох видів залежить від конкретного випадку, але кожен з них обумовлює необхідність використання аналого-цифрового перетворювача.
Розроблюємий пристрій призначен для високоточного вимірювання та контролю кутової швидкості та інших параметрів руху ЕМПЕ у динамічному режимі. Тобто він повинен працювати як в режимі реального часу так і обчислювати залежності кутової швидкості, кутового прискорення, кута повороту валу від часу. Це обумовлює необхідність реалізації пристрою на основі персональної ЕОМ.
Таким чином, пристрій буде складатись з двох структурних блоків :
- тахометричного перетворювача;
- блоку зпряження тахометричного перетворювача з ПЕОМ.
Для узгодження роботи аналого-цифрового перетворювача та мікропроцесора ПЕОМ необхідно використати порт уведення-виведення та схему його ініціалізації.
Для запуску аналого-цифрового перетворювача використовується генератор з кварцевою стабілізацією частоти. При відомому періоді частоти цього генератору можливе вимірювання залежностей параметрів руху від часу, не проводячи сумісних вимірювань часу.
Данні та керуючі сигнали порту уведення-виведення передаються на системну шину та ОЗУ ПЕОМ. Після проведення вимірювань необхідні залежності обчислюються у відповідності з схемою роботи пристрою.
Структурну схему розроблюємого пристрою наведено на рис. 2.1.
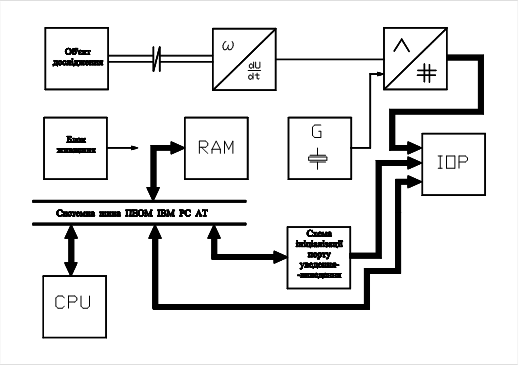
Рис. 2.1 - Структурна схема комп’ютеризованої вимірювальної системи вимірювання залежності кутової швидкості від часу
Дата: 2019-07-30, просмотров: 296.