В курсовом проекте проектируется аналоговая система управления электроприводом. Система управления строится по принципу подчиненного регулирования координат.
Каждый электропривод снабжается системой автоматического регулирования (САР), предназначенной для изменения по заданному закону основной координаты электропривода, регулирования и ограничения промежуточных координат. В системе регулирования скорости основной координатой является скорость двигателя, а промежуточной — ток якоря. В САР основной координатой является положение исполнительного органа механизма, а скорость и ток — промежуточными.
Система регулирования замкнутая (с обратной связью), т.е. заданное значение координаты сравнивается с фактическим и их разность, усиленная и преобразованная в регуляторе, в конечном счете воздействует на вход СИФУ тиристорного преобразователя якоря или возбуждения электродвигателя. Системы построены по принципу подчиненного регулирования, в соответствии с которым САР разбивается на несколько контуров, один из этих контуров является внешним, на его входе сравниваются задание и фактическое значение основной координаты. Выход внешнего контура является задающим сигналом для промежуточного контура, на входе которого сравниваются выходной сигнал внешнего контура и фактическое значение промежуточной координаты, и т.д., а выход внутреннего контура воздействует на вход СИФУ.
Выбор структуры системы управления электропривода производится с учетом требований технического задания на электропривод. Основными требованиями к электроприводу являются: поддержание заданной скорости вращения электропривода (с учетом требуемых диапазона регулирования скорости, допустимой статической погрешности поддержания скорости), величина токоограничения при упоре, ускорение электропривода при пуске.
В качестве внутреннего контура принимаем контур регулирования тока якоря. Он применяется, если требуется обеспечить:
-ограничение тока якоря допустимым значением при перегрузках электропривода;
- пуск или торможение электропривода с максимально возможным темпом;
- дополнительную коррекцию во внешнем контуре регулирования скорости.
В качестве внешнего контура принимаем контур регулирования скорости.
Рассмотрим функциональную схему системы управления электроприводом (рис 9). Система управления электроприводом представляет собой двухконтурную систему автоматического регулирования (САР) скорости. Внутренним контуром системы является контур регулирования тока якоря, внешним и главным контуром - контур регулирования скорости.
Для проектируемого электропривода выбираем однократную систему регулирования скорости. Однократная САР скорости по сравнению с двукратной не обладает астатизмом по возмущающему воздействию (моменту сопротивления), однако для проектируемой системы обеспечение такого астатизма не требуется. Однократная САР скорости обладает лучшими динамическими свойствами по сравнению с двукратной САР. Для контуров регулирования тока якоря и скорости применяется настройка на модульный оптимум. Данную настройку обеспечивают пропорционально-интегральный регулятор тока (РТ) и пропорциональный регулятор скорости (PC). Плавное ускорение и замедление привода обеспечиваются с помощью задатчика интенсивности (ЗИ). Для разгона или торможения привода задатчик интенсивности формирует линейно изменяющийся во времени сигнал задания на скорость.
Сигналы обратных связей поступают в систему регулирования от датчиков тока якоря (ДТ), напряжения якоря (ДН) и скорости (ДС). Датчики состоят из измерительного элемента и устройства согласования. Измерительным элементом для датчика тока якоря является шунт в цепи якоря Rш, для датчика напряжения - делитель напряжения Rд, для датчика скорости - тахогенератор (ТГ). Устройство согласования обеспечивает необходимый коэффициент передачи датчика и гальваническую развязку силовых цепей от цепей управления. Косвенный датчик ЭДС (ДЭ) вычисляет ЭДС якоря по сигналам датчиков тока и напряжения. Сигнал ЭДС через звено компенсации (ЗК) подается на вход регулятора тока, что требуется для компенсации отрицательного влияния ЭДС якоря на процессы в контуре тока.
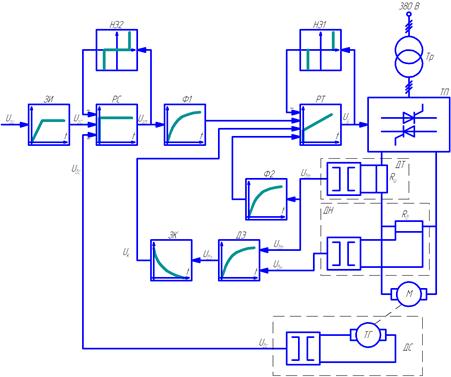
Рис. 9 .Функциональная схема системы управления электроприводом
Дата: 2019-07-30, просмотров: 295.