Схема используемого цифрового ПИД – регулятора представлена в соответствующем документе (структурная схема – на рисунке 10.1). На его вход подаются два сигнала: задающий, и сигнал обратной связи, приведенные к условному максимуму в 5 В. Для выделения ошибки, сигнал ОС предварительно инвертируется, после чего уже идет на сумматор. Ошибка проходит на три параллельно соединенных усилителя, отвечающих за отработку пропорционального, интегрального и дифференциального коэффициентов усиления.
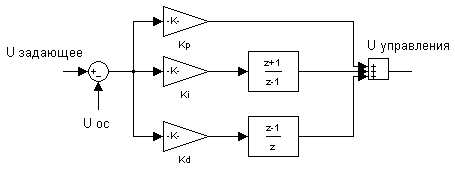
Рисунок 10.1 – Структурная схема цифрового ПИД – регулятора
Для реализации схем задержек типа  и
и  используются развязки, изображенные на рисунке 10.2 (схемы соответствуют порядку следования передаточных функций в тексте).
используются развязки, изображенные на рисунке 10.2 (схемы соответствуют порядку следования передаточных функций в тексте).
В качестве звена задержки используется интегральная микросхема, позволяющая задерживать аналоговый сигнал, дискретный, представляемый в последовательном или параллельном виде. Микросхема также позволяет программно менять время задержки.
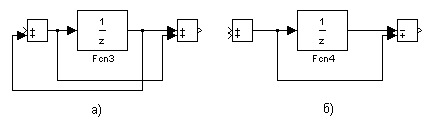
Рисунок 10.2 – Способы реализации передаточных функций звеньев задержки
Как видно, вся принципиальная схема строится на операционных усилителях (используются для реализации усилителей, сумматоров и инверторов), интегральных микросхемах задержки и резисторах.
На принципиальной электрической схеме также изображена схема дистанционного управления электроприводом регулирующего устройства (например, автоматического клапана, для отключения насосов от водопроводной сети).
Схема обеспечивает движение регулирующих устройств только во время подачи командных сигналов. Ограничение хода регулирующих устройств в конечных положениях обеспечивается соответствующими конечными выключателями.
Для предотвращения одновременного включения обеих катушек реверсивного магнитного пускателя, помимо механической блокировки, которой снабжен пускатель, в схеме предусмотрена электрическая блокировка с помощью размыкающих блок -контакторов ПМЗ и ПМО.
Электропривод снабжен потенциометрическим датчиком ПД, движок которого механически связан с редуктором привода. Датчик ПЛ подключается к устанавливаемому на щите управления блоку указателя положения БУП, состоящему из трансформатора питания, выпрямителей, подгоночного резистора и стрелочного прибора УП, шкала которого имеет градуировку 0 – 100%, пропорционально напряжению, снимаемому с потенциометрического датчика. Контакторы используются для отключения цепей управления при воздействии на привод ручным способом с помощью маховика.
Дата: 2019-07-30, просмотров: 340.