1. Управление по отклонениям.



 ЭВМ Задача состоит в поддержании на ОУ некоторого параметра у заданного:
ЭВМ Задача состоит в поддержании на ОУ некоторого параметра у заданного:



 ОУ
ОУ  – аварийное значение.
– аварийное значение.
 ; i– дискретное время
; i– дискретное время
Проблема: Dх– может быть const или @.
На практике:
а) либо Dх определяется или рассчитывается исходя из описания объекта управления устройств связи с ОУ и условий его работы;
б) либо проводится предварительное моделирование работы объекта и по результатам этого моделирования определяется работа х.
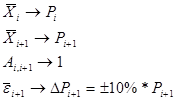
2. Пропорциональное управление.
 ;
;  ;
; 
Данный способ является более грубым по сравнению с предыдущим.
На практике (когда объект не меняем):
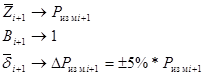
3. Стохостическая аппроксимация.
 ;
;  ;
;  ;
;
Данный способ является более тонким по сравнению со вторым способом. Эти способы позволяют организовать сам процесс управления.
Элементы математического моделирования.
Различают следующие классы моделей:
1. Линейный и нелинейный.
2. Статический и динамический.
3. Непрерывный и дискретный.
4. Детерминированный (заранее определенный) и стохастический.
Различные способы модели.
Для автоматизации технических процессов функционирования объектов моделирования работы вычислительных систем как правило используется линейная стохостическая модель которая описывается системой 2-х векторных конечноразностных уравнений следующего вида:
|
|
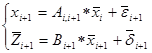
, (1) уравнение динамики
, (2) уравнение наблюдения (измерения)
i– дискретное время

 – это вектор–столбцы параметров процесса объекта системы (Соответственно моменты времени i и i+1 размерностью [1*n]);
– это вектор–столбцы параметров процесса объекта системы (Соответственно моменты времени i и i+1 размерностью [1*n]);
Ai ,i+1 – Известная квадратная матрица перехода процесса объекта системы из состояния в момент времени i в состояние момента времени i+1 размерностью [n*n];
 – Векторный столбец возмущающих воздействий (помех) в момент времени i+1, размерностью [1*n];
– Векторный столбец возмущающих воздействий (помех) в момент времени i+1, размерностью [1*n];
 – Вектор столбец в параметрах наблюдения или измерения в момент времени i+1, размерностью [1*m];
– Вектор столбец в параметрах наблюдения или измерения в момент времени i+1, размерностью [1*m];
Bi+1 – Известная матрица наблюдения или измерения в момент времени i+1, размерностью [m*n];
 – Вектор столбец возмущающих воздействий наблюдения измерения в момент времени i+1, размерностью [1*m];
– Вектор столбец возмущающих воздействий наблюдения измерения в момент времени i+1, размерностью [1*m];
m£n;
В этой системе уравнений неизвестной являются его компоненты вектора столбца  . Остальные предполагаются либо известными, либо определяются каким-то образом. На практике n£10 в противном случае вычисления громоздки.
. Остальные предполагаются либо известными, либо определяются каким-то образом. На практике n£10 в противном случае вычисления громоздки.
Пример: Измеряется плавно меняющийся параметр, которым нужно управлять (с заданной погрешностью).
 , · – коэффициент
, · – коэффициент
В данной системе учитываются только аддитивные ошибки.
Для учета, наряду с учетом аддитивных ошибок и мультипликативных ошибок система принимает вид:
 – известная квадратная матрица учета мультипликативных ошибок размерностью [m*n];
– известная квадратная матрица учета мультипликативных ошибок размерностью [m*n];
 – известная матрица учета мультипликативных ошибок при наблюдении или измерении размерностью [m*n].
– известная матрица учета мультипликативных ошибок при наблюдении или измерении размерностью [m*n].
Рассмотрена система уравнений представленных цифровым фильтром Калмана с помощью которого могут быть определены текущие параметры, а также предшествующие и последующие.
Пример: Фрагмент программного обеспечения в сложной АСУ:
АСУ=ОУ+ЦСУ
а) Объект управления включает в себя: колесные средства передвижения и испытательный стенд для имитации натурных экспериментов.
б) Комплекс технических средств: сложное АСУ имеющий иерархию.
|
|
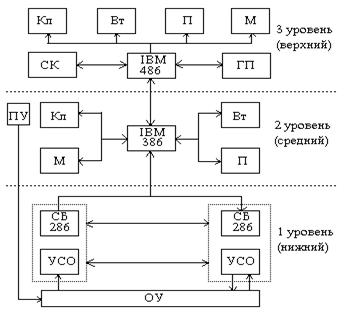
М–мышь;
Вт–видетерминал;
СК–сканер;
Кл–клавиатура;
ГП–графопостроитель;
П–принтер;
ПС–подсистемный сбор;
ПУ–пультовое управление оператора.
На 1-м уровне производится сбор, регистрация, преобразование информации, реализация управляющих воздействий.
На 2-м уровне производится оперативная обработка информации с 1-го уровня.
На 3-м уровне производится планирование экспериментов, обработка статистики за длительный период и ее анализ, расчет обработанных характеристик.
3. Взаимосвязь основных прикладных программ (программных модулей) под системой управления АСУ:
|
|
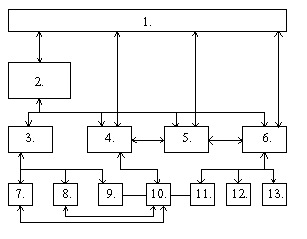
Модули:
1. Управляющая программа (программа–монитор).
2. Программа управления параметрами процесса.
3. Программа межмашинной связи (286 на 1-м уровне, 386 на 2-м уровне) и подсистема управления.
4. Модули межмашинной связи (286 процессора подсистема управления и 286 процессора подсистема сбора информации).
5. Программа сбора и регистрации измерительной информации в подсистеме управления (286 процессор подсистема управления)
6. Программа обработки измерительной информации в подсистеме управления (286 процессор подсистемы управления).
7. Программа начального диалога (программа, предназначена для ведения начального диалога пользователем с ПЭВМ 2-го уровня 386).
8. Программа визуализации процесса (ПЭВМ 2-го уровня 386).
9. Программа протоколирования результатов эксперимента (ПЭВМ 2-го уровня 386).
10. Программа сбора и регистрации измерительной информации в подсистеме сбора информации (286 процессор подсистемы сбора информации).
11. Программа аварийного останова (286 процессор подсистемы управления).
12. Программа перевода системы в режим ожидания (286 процессор системы управления).
13. Программы выхода из режима ожидания (286 процессор подсистемы управления).
Эти программы предназначены для ввода, хранения и выдачи необходимой информации оператору с использованием базы данных. Содержит 2 вида исходных данных:
а) постоянно меняющиеся данные (от сеанса к сеансу). К ним относятся дата и время проведения эксперимента; фамилия, имя, отчество оператора; его должность; техническое задание на эксперимент; технические условия; дополнительные условия.
б) постоянные (редко меняющиеся) данные: справочная информация (ГОСТы, ОСТы, нормативы); справочные таблицы; различные расчеты (формулы). Этой справочной информации соответствует справочный раздел базы данных (справка или help–помощь).
Рекомендуемые данные: метрологические характеристики приборов и устройств; постоянные сведения на эти приборы.
Потом запускаем систему Þ
8. Программа визуализации процесса.
Эти программы необходимы для вывода на экран важнейших параметров экспериментального процесса с возможностью просмотра других групп параметров.
9. Программа протоколирования результатов для выдачи на принтер результатов эксперимента.
Два варианта протоколирования:
а) прямой вывод информации (всех результатов) при отказе или аварии;
б) оговоренный заранее заказчиком, вывод определенного блока результата эксперимента.
5,10. Программа сбора и регистрации измерительной информации.
Предназначена для сбора информации с объекта управления и проверки параметров процесса на предупредительный и аварийный уровень. В данном примере информация регистрировалась в 2-х буферах, работающих поочередно. После наполнения 1-го буфера, информация переходит во 2-й буфер.
6. Программа обработки измерительной информации в подсистеме управления.
Были реализованы на основе основных способах преобразования информации при работе ЭВМ с внешними устройствами.
11. Программа аварийного останова.
Назначение: в случае превышения аварийного уровня параметров выдать команду на клапан, прерывающий подачу топлива. Она реализована на 2-х языках внешний блок– Турбо-Паскаль, внутренний блок – на Ассемблере (для быстроты).
12. Программа перевода системы в режим ожидания.
Необходима в случае превышения предупредительного уровня параметров. На экран оператору выдается соответствующее сообщение. Испытывают 13 модуль и система снова начинает работать. 3,4. Программа межмашинных связей .
Написана только на Ассемблере.
2. Программа управления параметрами процесса.
Представляет собой внешнюю оболочку всех остальных программ.
Пример способов преобразовании информации и управления при работе с внешними устройствами.
В качестве АСУ рассмотрим АСУ ТП цеха термообработки деталей.
1. Объект управления (ОУ)– термическая печь закалки деталей:
|
|
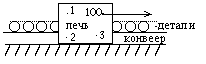
Внутри печи надо создать температурное поле, которое обеспечило бы закалку деталей. Контроль за полем осуществляется в 100 точках с помощью датчиков одного класса и типа:

2. Комплекс технических средств (КТС).
К нему относятся:
а) датчики (Д)(ПП– первичный преобразователь).
б) устройство связи с объектом – система интерфейса (УСО–Ш)
в) вычислительная машина (комплекс ВК),(ППЭВМ типа IBM PC)
г) кабели (КС)
д) исполнительные механизмы (ИМ), нагревательные элементы (НЭ)
е) пульт управления (ПУ)
Типовой состав пульта управления: рабочее место оператора, приборы (измерительные), мнемосхема – отражения процесса (например лампочки), органы управления (тумблера, рычаги), средства связи.
Структурная схема КТС:
|
|
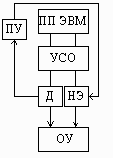
Отражает одноуровневою структуру АСУ.
Стандартный набор УСО:
а) устройство преобразования информации – усилители, нормализаторы;
б) устройство выдачи информации;
в) устройство управления – контроллер;
г) интерфейс;
д) блок питания.
Рассмотрим один из измерительных каналов АСУ ТП:
|
|
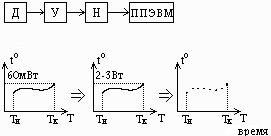
Д– первичный преобразователь.
У– усилитель.
Н– нормализатор.
Способы управления:
а) определение шага дискретизации;
б) отбраковка ложных промахов;
в) цифровая фильтрация;
г) интер–экстрополяция.
3. Математическая постановка задачи.
Способ управления– стохостической аппроксимации.
|
|
Вместо yi используют y из RND с учетом распределения Гаусса.

 yсл
yсл  ; ±> – больше аварийного.
; ±> – больше аварийного.
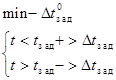
Пример: Построение математической модели стохастического типа.
В процессе функционирования АСУ получены 100 замеров плавноменяющегося параметра Р. Замеры проводились в течении 10 секунд равномерно (т.е. каждую секунду). Наибольшее отклонение параметра Р от его некоторого среднего значения Рср , не превышают 10% т.е. задана погрешность. Погрешность измерения параметра – 5%. Какой вид будет иметь стохастическая модель в виде системы двух конечноразностных уравнений (динамики и измерения).
|
|
|
|
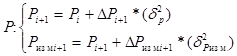 ;
;  – дискретизация.
– дискретизация.
DР– берем либо из условия задач или через большее значение.
Построение баз данных.
База данных (БД)– совокупность взаимосвязанных данных хранящихся в памяти ЭВМ, вводятся, хранятся, просматриваются, обрабатываются, а также выводятся на экран.
Существует два способа создания базы данных:
а) Позадачный– каждая задача работает со своей совокупностью данных;
б) с использованием систем управления БД (СУБД).
|
|
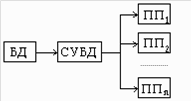
Имеем БД, СУБД, задачи (прикладная программа 1,2, ... , n) работает сразу со всеми задачами.
СУБД выполняет двоякую функцию:
а) является инструментальным средством (средой), создания, разработки, программирование БД;
б) обеспечивает эксплуатацию БД.
Современные СУБД можно классифицировать на следующие классы:
а) электронные таблицы (Super Calc /MSDOS/, Excel /Windows/)
Первый класс СУБД используется для решения небольших по объему (V) и несложных по выполнению задач.
Функциональные возможности электронных таблиц:
— написание, корректировка и другая работа с текстом (т.е. имеют свой встроенный редактор);
— проведение расчетов и вычислений с помощью общепринятых арифметических, логических операций и встроенных функций (sin, cos, tg, ctg).
— работа в режиме псевдографики, т.е. создание столбцовых, прямоугольных, круговых, линейчатых, зонных и других диаграмм.
— работа со встроенной БД реалиционного типа.
Пример:

 Y
Y
| А | B | C | D | Таблицы: | |
| 1 | 200 | 300 | малые: 128*500 | ||
| 2 | средние: 256*2000 | ||||
| 3 | большие: 512*10000 | ||||
| ... |
X
В графике:
|
|
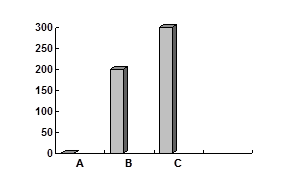
Умножение 200*300
B1*C1
Электронные таблицы содержат help(помощь); встроенный пакет–справочник с примерами.
При работе с базой данных в электронных таблицах, исходную таблицу смещают вниз от левого верхнего угла, а вверху записывают условия нахождения данных, они же–результирующие таблицы, которые отражают поиска.
б) Второй класс СУБД средство программирования баз данных оперативного типа (Clipper, dbase, FoxBase). Эти СУБД с точки зрения технологии создания БД аналогичны стандартному языку программирования (Турбо–паскаль).
в) СУБД комбинированного типа (на основе файловой
структуры /Clarion/).
г) СУБД со встроенными программами (генераторами) автоматизированного программирования объектов БД (таблицу, форм входных документаций, меню с подключением механизма реорганизации данных в БД, запросов с отчетами /форм входных документов/). Paradox – язык Pal (Pal не уступает Турбо–Паскалю 7.0). Он позволяет подключение подпрограмм, написанных на любом языке программирования
Объекты базы данных:
1. а) Таблицы (взаимосвязанные или невзаимосвязанные);
б) логические (вертуальные) таблицы – связанные между собой с помощью ключевых атрибутов
(нужна, чтоб не дублировать данные).
2. Формы входных документов с которыми работает пользователь.
3. Система управляющего меню.
4. Запросы.
5. Формы входных документов (отчеты).
Для полноценной работы БД создают или подключают механизм реорганизации данных в БД.
Жизненный цикл автоматизированной информационной системы:
— “бумажное” программирование;
— реализация;
— эксплуатация (введение БД).
Различают 3 основных модели БД:
— иерархическая;
— сетевая (реализует технологию “Клиент–Сервер”);
— реляционную модель для IBM PC (локальная).
Существует два подхода к созданию базы данных:
— сначала создаются таблицы и формы, а потом меню и запросы с отчетом;
— создается меню, потом таблицы и формы, запросы с отчетами.
Дата: 2019-07-30, просмотров: 307.