Электропривод эскалатора ЛТ-4
1. Высота подъема эскалатора 30 м
2. Угол наклона эскалатора 300
3. Ширина ступени 1 м
4. Шаг ступени 0,4 м
5. Шаг цепи 0,133 м
6. Диаметр начальной окружности приводной звездочки 1,695 м
7. Нагрузка эксплуатационная на погонный метр несущего полотна 2170 Н.
8. Скорость движения несущего полотна 0,88 м/с
9. Момент инерции вращающихся частей, приведенный к валу электропривода 4,32 кг*м2
10. Приведенный к валу двигателя момент инерции поступательно движущихся частей эскалатора и пассажиров при максимальной загрузке 7,4 кг*м2
11. Передаточное число системы электропривода 58,1
12. КПД электропривода 0,911
13. Суточный график нагрузки эскалатора приведен на рис.1.
14. Кинематическая схема эскалатора приведена на рис.2.
15. Геометрическая схема трассы приведена на рис 3.
 Рнагр
Рнагр 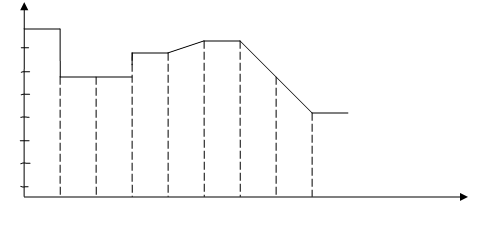
70
60
50
40
30
20
10
9 11 13 15 17 19 21 23 t, 24 ч.
Рис. 1. Изменение нагрузки на эскалаторе в течение суток
|
|
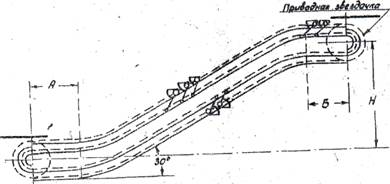
Рис.2. Кинематическая схема привода эскалатора (левый привод)
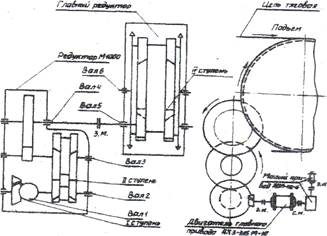
Рис.3. Геометрическая схема трассы полотна.
Содержание
1. Теоретическая часть
2. Расчетная часть
2.1 Определить статические нагрузки, действующие на валу двигателя
2.2 Подсчитать потребляемую мощность двигателя и выбрать его по каталогу
2.3 Рассчитать пусковое сопротивление, подобрать по каталогу и дать внешнюю схему соединения
2.4 Построить графики скорости и тока в роторе двигателя в зависимости от времени
2.5 Построить графики регулировочных механических характеристик двигателя
2.6 Проверить выбранный двигатель по типу и по перегрузочной способности
2.7 Определить расход электроэнергии за сутки, среднесуточный КПД и коэффициент мощности
3. Схема силовой цепи электропривода
Список литературы
Теоретическая часть
Эскалаторы получили широкое применение на станциях метрополитена, в административных и торговых зданиях, где имеются большие потоки пассажиров. В зданиях целесообразно использовать эскалаторы совместно с методами причем эскалаторы устанавливаются на нижних этажах, где имеется место наиболее интенсивного движения.
Существуют эскалаторы двух типов: с одной и двумя рабочими ветвями лестничного полотна. Из-за сравнительно небольших габаритов более широкое применение получили эскалаторы с одной рабочей ветвью.
У эскалатора ступени лестничного полотна связаны шарнирами с двумя замкнутыми цепями, которые приводятся в движение ведущей звездочкой. Ступени катятся по бегункам по направляющим. Нижние звездочки связаны с натяжной станцией, которая обеспечивает постоянное натяжение тяговых цепей. Вал верхней звездочки через цепную передачу и редуктор связан с приводным двигателем.
Приводная станция эскалатора снабжена двумя рабочими тормозами и аварийными. Рабочие тормоза устанавливаются непосредственно у двигателя, а аварийный тормоз – у вала тяговой звездочки.
Для удобства и безопасности пользования с двух сторон от лестничного полотна эскалатор снабжен движущимися поручнями. Поручни приводят в движение через цепные передачи или редуктор от главного двигателя тяговых цепей.
Скорость движения лестничного полотна эскалатора в пределах от 0,45-1 м/с. Верхний предел скорости ограничен тем, что вход и выход пассажиров происходят на ходу.
Расчетная часть
Выбор электродвигателя
Ммах = Мс = 1072 Нм
Рдв = 1072*58,67= 62,89 кВт – расчетная мощность двигателя.
 об/мин – расчетная частота вращения.
об/мин – расчетная частота вращения.
По расчетным значениям выбираем двигатель: 4АНК315510УЗ
Р2ном=75 кВт, I2ном=221 А, U2ном=217 В, Sном=4,5%, Sк=15,8%, η=90%, J=6,2 кгм2, хм=3,5, х1=0,14, х2=0,99, R=0,036, R=0,052.
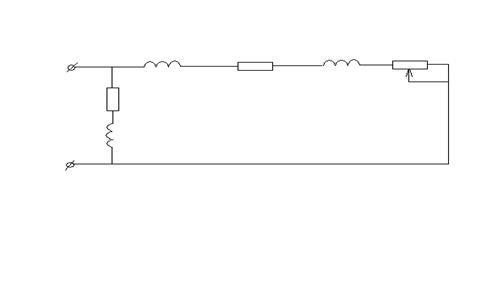 Схема замещения
Схема замещения







 ~
~  ,
, 



Рис.5. Схема замещения двигателя
Uфм=220 В
 — номинальный ток,
— номинальный ток,
 Ом — полное сопротивление статора,
Ом — полное сопротивление статора,
 Ом — приведенное сопротивление магнитной цепи,
Ом — приведенное сопротивление магнитной цепи,
 Ом — приведенное активное сопротивление статора,
Ом — приведенное активное сопротивление статора,
 Ом,
Ом,  Ом,
Ом,  Ом,
Ом,
 Ом — индуктивное сопротивление обмотки статора,
Ом — индуктивное сопротивление обмотки статора,
 Ом — активное сопротивление статора,
Ом — активное сопротивление статора,
 А — ток ротора,
А — ток ротора,
 ,
,  ,
,
 Нм — номинальный момент,
Нм — номинальный момент,
 — число полюсов,
— число полюсов,
 с-1 — синхронная скорость вращения,
с-1 — синхронная скорость вращения,
 об/мин,
об/мин,
 с-1 — номинальная скорость вращения.
с-1 — номинальная скорость вращения.
Пусковые: SП=1
 А — ток в роторе при пуске,
А — ток в роторе при пуске,
 Нм — пусковой момент.
Нм — пусковой момент.
Критические заключения: S=0, 15
 A
A
 Нм.
Нм.
Динамические моменты:
 Нм
Нм
 Нм
Нм
Число ступеней добавочных сопротивлений:
 ,
,  ,
,
 ,
,  ,
,
 ,
, 
Результаты вычислений сведены в таблице 1.
Табл.1.

| 1 | 0,9 | 0,8 | 0,7 | 0,6 | 0,5 | 0,4 | 0,3 | 0,025 | 0,2 | 0,15 | 0,1 | 0,07 | 0,055 | 0,045 | 0 |

| 463,4 | 461,4 | 458 | 455,3 | 450 | 442 | 430 | 407 | 388,9 | 361 | 318 | 250 | 192 | 157 | 137,7 | 0 |

| 0 | 6,28 | 12,8 | 18,8 | 25,1 | 31,4 | 37,7 | 43,9 | 47,1 | 50 | 53,4 | 56,5 | 58,4 | 59,3 | 59,9 | 62,8 |
| M | 718 | 789,9 | 879,8 | 990 | 1128 | 1306 | 1545 | 1846 | 2022 | 2178 | 2254 | 2089 | 1761 | 1498 | 1250 | 0 |
Построим механическую характеристику электродвигателя.
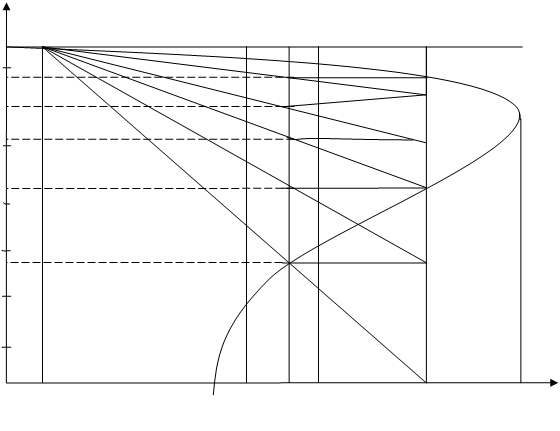 ω, с-1
ω, с-1
t g
60 f
e
50 d
40 c
30
b
20
10
a
М0 Мп Мс М2 Мн М 2000 Мн М, Нм
Рис.6. Механическая характеристика электродвигателя.
Список литературы
1. Чилинин М.Г. «Общий курс электропривода» — М. Энергия 1971 г.
2. Чилинин М.Г., Ключев В.И., Санднер А.С. «Теория автоматизированного электропривода» — М. Энергия 1979 г.
3. Маскаленко В.В. «Электрический привод» Мастерство. Высшая школа 2001.
4. Александров М.М. «Подъемно-транспортные машины» — М. Высшая школа 2001 г.
5. Фролов Э.М. «Основы электропривода». Учебное пособие. Чебоксары, Чувашский Государственный Университет 2001 г.
Электропривод эскалатора ЛТ-4
1. Высота подъема эскалатора 30 м
2. Угол наклона эскалатора 300
3. Ширина ступени 1 м
4. Шаг ступени 0,4 м
5. Шаг цепи 0,133 м
6. Диаметр начальной окружности приводной звездочки 1,695 м
7. Нагрузка эксплуатационная на погонный метр несущего полотна 2170 Н.
8. Скорость движения несущего полотна 0,88 м/с
9. Момент инерции вращающихся частей, приведенный к валу электропривода 4,32 кг*м2
10. Приведенный к валу двигателя момент инерции поступательно движущихся частей эскалатора и пассажиров при максимальной загрузке 7,4 кг*м2
11. Передаточное число системы электропривода 58,1
12. КПД электропривода 0,911
13. Суточный график нагрузки эскалатора приведен на рис.1.
14. Кинематическая схема эскалатора приведена на рис.2.
15. Геометрическая схема трассы приведена на рис 3.
Рнагр
70
60
50
40
30
20
10
9 11 13 15 17 19 21 23 t, 24 ч.
Рис. 1. Изменение нагрузки на эскалаторе в течение суток
|
|
Рис.2. Кинематическая схема привода эскалатора (левый привод)
Рис.3. Геометрическая схема трассы полотна.
Содержание
1. Теоретическая часть
2. Расчетная часть
2.1 Определить статические нагрузки, действующие на валу двигателя
2.2 Подсчитать потребляемую мощность двигателя и выбрать его по каталогу
2.3 Рассчитать пусковое сопротивление, подобрать по каталогу и дать внешнюю схему соединения
2.4 Построить графики скорости и тока в роторе двигателя в зависимости от времени
2.5 Построить графики регулировочных механических характеристик двигателя
2.6 Проверить выбранный двигатель по типу и по перегрузочной способности
2.7 Определить расход электроэнергии за сутки, среднесуточный КПД и коэффициент мощности
3. Схема силовой цепи электропривода
Список литературы
Теоретическая часть
Эскалаторы получили широкое применение на станциях метрополитена, в административных и торговых зданиях, где имеются большие потоки пассажиров. В зданиях целесообразно использовать эскалаторы совместно с методами причем эскалаторы устанавливаются на нижних этажах, где имеется место наиболее интенсивного движения.
Существуют эскалаторы двух типов: с одной и двумя рабочими ветвями лестничного полотна. Из-за сравнительно небольших габаритов более широкое применение получили эскалаторы с одной рабочей ветвью.
У эскалатора ступени лестничного полотна связаны шарнирами с двумя замкнутыми цепями, которые приводятся в движение ведущей звездочкой. Ступени катятся по бегункам по направляющим. Нижние звездочки связаны с натяжной станцией, которая обеспечивает постоянное натяжение тяговых цепей. Вал верхней звездочки через цепную передачу и редуктор связан с приводным двигателем.
Приводная станция эскалатора снабжена двумя рабочими тормозами и аварийными. Рабочие тормоза устанавливаются непосредственно у двигателя, а аварийный тормоз – у вала тяговой звездочки.
Для удобства и безопасности пользования с двух сторон от лестничного полотна эскалатор снабжен движущимися поручнями. Поручни приводят в движение через цепные передачи или редуктор от главного двигателя тяговых цепей.
Скорость движения лестничного полотна эскалатора в пределах от 0,45-1 м/с. Верхний предел скорости ограничен тем, что вход и выход пассажиров происходят на ходу.
Расчетная часть
Дата: 2019-07-24, просмотров: 322.