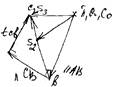
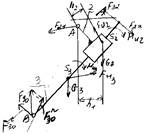
План ускорений
План скоростей
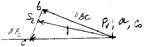
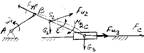
Рычаг Жуковского
MИ2 = FМИ2 ×ℓBC, FMИ2 = MИ2/ℓBC,
Момент на рычаге Жуковского:
mV(Fур(ab) +FMИ2(bc)–G2h1–FИ2h2–(FC+FИ3)pVc)=0,
Fур= (–FМИ2×bc+G2h1+FИ2h2 +(FC+FИ3)pVc)/ab
Уравновешивание рычажных механизмов
Метод замещающих масс:
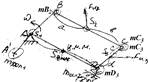
Сместим центр масс звена АВ в точку А путем некоторого противовеса у точки А. Тоже самое проделываем для звена CD.
1)m1 + m2+ m3 + m4 = M
2) Smixi = 0
3) Smiyi = 0
Выше написанное является условием смещения центра масс.
4) Smi(xi2+yi2)=Js
Для второго звена: mB2×a = mC2×b –статические моменты,
mB2(a+b) = mC2b, mC2 = m×b/(a+b), mC2=m2×a/(a+b).
Для третьего звена:
mC3 = m3×d/(c+d), mD3 = m3×c/(c+d)
Рассмотрим равновесие первого звена:
mB2×AB = mдоп1×AA¢, mдоп1=mB2AB/AA¢, (mC2+mC3)×CD = mдоп2×DD¢, mдоп2 = (mС2+mС3)×CD/DD¢, (mB2+mдоп1)ASцмм = (mC2+mC3+mD+mдоп2)DSцмм, mSAAD = (mSA+mSD)SD, SD = AD×MSA/(mSA+mSD)
Уравнение удовлетворяет трем условиям: сумма по оси x и y = 0, сумма всех масс = общей массе.
Расчет зубчатых колес
1) αW – угол зацепления, α – угол рейки. inv αW = inv α + 2xΣtgα/(z1+z2), inv αW = tg αW – αW (инвалюта). aW – межосевое расстояние при смещении, a – межосевое расстояние без смещения. aW=a×cosα/cosαW, a=r1+ r2, r1 – радиус делительной окружности шестерни, r2 – радиус делительной окружности зубчатого колеса. a=r1+r2=(m/2)(z1+z2). y – коэф-т воспринимаемого смещения. ym=αW-a, y=(αW-a)/m. Δy – коэф-т уравнительного смещения.
½mz1+½mz2+ym=½mz1+(ha*+x1+Dy)m+ ½mz2–(ha*–x2+c*)m+c*m
aW=r1+r2+ym, aW=r1a+rf2+c*m,
сократив одинаковые выражения в левой и правой частях уравнения и разделив все на m, получим: y=x1+x2-Δy x1+x2=xΣ – суммарный коэф-т смещения,
Δy= xΣ–y
2) aW = a∙cosα/cosαW,
αW = arccos(a∙cosα/aW),
inv αW = inv α + 2xΣtgα/(z1+z2)
xΣ=(invαW – invα)(z1+z2)/2tgα
y=(αW-a)/m. Δy= xΣ–y
Коэф-т перекрытия. Определение его графическим и аналитическим методами
Коэф-т перекрытия определяет плавность работы зубчатой передачи и показывает среднее значение числа пар сопряжения зубьев, находящихся в сопряжении. Такие качества передачи обеспечиваются перекрытием работы одной пары зубьев работой другой пары. Для этого каждая последующая пара зубьев должна войти в зацепления еще до того, как предшествующая пара выйдет из зацепления. E=B1B2/πmcosα, πm – шаг по делительной окружности, πmcosα – шаг по основной окружности, B1B2 – часть линии зацепления ограничительной окружности вершин зубьев шестерни зубчатого колеса, которая называется активной частью линии зацепления.
Аналитический метод. B1B2=B1P+PB2=B1N1–PN1+BN2–PN2=√(r2a1–r2b1)+√(r2a2–r2b2)–N1N2,
N1N2= rW1sinαW+rW2sinαW=aWsinαW
rW1, rW2 – радиусы начальных окруж.

E > 0 должно быть всегда. Для обычных передач Е ≈ 1,3. Чем больше число зубьев, тем больше Е.
Графический метод
О величине перекрытия судят по коэффициенту перекрытия, который выражают отношением угла торцового перекрытия к угловому шагу. Угол торцового зацепления a – это угол поворота колеса от положения зубьев при входе в зацепление. Следовательно,
Е = jа1/t1,
где t1=2p/z1– угловой шаг.
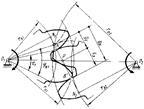
Если Е<1, то непрерывности зацепления зубьев не будет.
Условие статической определимости системы
3n=2p1+p2 – усилие статической определимости, число усилий = число неизвестных. Чаще 3n = 2p1, т.к. p2 = 0, условие существований групп Ассура (DW=3n–2p1 = 0).
Определение сил инерции и моментов от сил инерции
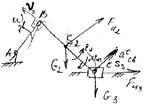
S2 – центр масс 2-го звена

FИ2= –m2×aS2 = – m2(nS2)ma , MИ2
(момент от силы инерции)= –JS2×E2 = –JS2×(tcb)ma/
/ℓCB, FИ3 = –m3aS3 = –m3(pS3)ma = 0.
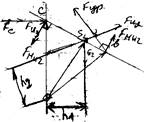
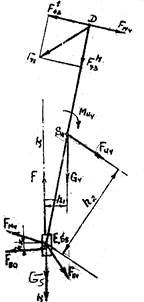
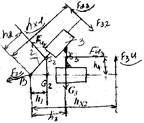
Силовой расчет первой группы Ассура

F30 – сила в точке D со стороны отброшенной опоры 0; F21 – сила, действующая со стороны первого (отброшенного) звена на второе. Разложим силы F21 и F30 – на второе путем проецирования их на соответствующие звенья 2 и 3. 1)F21t, SMC =0 (равновесие 2-го звена):
F21t (BC)×mℓ–G2h1×mℓ+FИ2h2×mℓ + MИ2=0,
F21t=(G2h1mℓ–FИ2h2mℓ–MИ2)/[(BC)×mℓ].
2)F30t, SMC=0 (равновесие 3-го звена):
F30t(CD)mℓ + G2h3mℓ + FИ3h4mℓ – MИ3=0,
F30t=[–G2h3mℓ – F4h4mℓ + MИ3] / [(CD)mℓ].
3)F21n, F30n, SF=0 (равновесие звена 2 и 3):
F21n+F21t+G2+FИ2+G3+FИ3+F30t+F30n = 0.
Величины искомых сил известны, но не известны их направления.
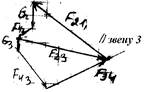
4)F23, SF=0 (равновесие звена 2 и 3):
F21n + F21t + G2 + F23=0.
Далее определяем значение уравновешивающей силы на начальном звене:

F10 – сила со стороны отброшенной опоры 0 на звено 1.
5) Fур, SMA = 0: Fур(АВ)mℓ–F12h1mℓ = 0, т.к. на звене формально нет момента, то mℓ можно не писать, т.е получим Fур(АВ) – F12h1=0
6) F10, SF = 0: Fур+F12+F10 = 0

Рисуем все известные силы последовательно, учитывая величины и направления. Т.к. SF=0, то соединив конец вектора силы F12 и начало Fур получим искомую силу F10.
Силовой расчет группы Ассура 2-го вида
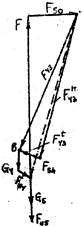
F43 – сила, действующая со стороны третьего (отброшенного) звена на четвертое.
1) F43t, SME = 0 (равновесие звена 4): F43t(DE)mℓ–G4h1mℓ–FИ4h2mℓ–MИ4=0
F43t=(G4h1mℓ+FИ4h2mℓ+МИ4)/(DE)mℓ
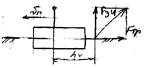
2) F50,F43n, SF = 0 (равновесие звена 4):
F43n + F43t + G4 + FИ4 + G5 + FИ5 + F + F50=0
3) F54, SF = 0 (равновесие звена 5):
G5 + FИ5 + F + F50 + F54=0.
4) hx, SME=0 (равновесие звена5): F50×hxmℓ=0, hx=0.
Силовой расчет группы Ассура 3-го вида
1)F30t, SMA=0 (равновесие звена 2 и 3)
2)F30n, F32, SF=0 (равновесие звена 3):
F30n + F20n +G3 +FИ3 + F32= 0

3) F21, SF=0 (равновесие звена 3):
F23 + G2 + FИ2 + F21=0
4)hX, SMA=0 (равновесие звена 2):
F23×hxmℓ + MИ2 + G2h1mℓ – FИ2h2mℓ =0,
hx = [–МИ2 – G2h1mℓ + FИ2h2mℓ] / (F23mℓ)
Силовой расчет группы Ассура 4-го вида

1)F21 и F34, SF=0 (равновесие звеньев 2 и 3):
F21 + G2 + FИ2 + G3 + FИ3 + F34=0
2)F23, SF=0 (равновесие звеньев 2 (3)):
F21+G2+FИ2+F23=0
3)hx1, SMB=0 (равновесие звена 2):
F21hx1–G2h1+FИ2×h2=0, hx1=(G2h1–FИ2h2)/F21
4)hx2, SMB=0 (равновесие звена 3):
F34×hx2–G3h3+FИ3×h4=0
Силовой расчет группы Ассура 5-го вида
1)F32 и F34, SF=0 (равновесие звена 3):
F34 + G3 + FИ3 + F34 = 0

2)F21, SF=0 (равновесие звена 2):
F23 + G2 + FИ2 + F21 = 0

3)hx1, SMB=0 (равновесие звена 2):
F23hx1–G2h1+FИ2h2=0, hx1=G2h1+FИ2h2=0
4)hX2, SMB=0 (равновесие 2 и 3):
F34hX2–G3h3–FИ3h4–G2h1+FИ2h2=0
hX2=(G3h3+FИ3h4+G2h1–FИ2h2)/F34.
Силовой расчет с учетом сил трения
Если учитывают силы трения, то сначала расчет производится без учета трения, а во втором расчете рассчитывают эти силы трения.
Fтр=F34×f,
где f – коэффициент трения
Определение уравновешивающей силы
Уравновешивающая сила определяется по рычагу Жуковского. Рычагом Жуковского называется повернутый на 90° план скоростей (желательно против направления вращения начального звена), к которому прикладывают все силы, действующие на механизм без изменения их направления и ищется равновесие этого рычага по принципу Лагранжа (для равновесия твердого тела необходимо, чтобы сумма работ равнялась нулю), т.е.
SFi×dSDicos(Fi, dSDi) = 0, SFidSDicos(Fi,dSDi)=0, точка D – точка, лежащая на звене к которой приложена сила F. Разделим все на dt:
SFi×VDicos(Fi, VDi) = 0
Для равновесия твердых тел необходимо и достаточно, чтобы мощность всех действующих на систему сил равнялась нулю. P = F2VS2cos a= F2(PVS2)mVcos a.

План ускорений
План скоростей
Рычаг Жуковского
MИ2 = FМИ2 ×ℓBC, FMИ2 = MИ2/ℓBC,
Момент на рычаге Жуковского:
mV(Fур(ab) +FMИ2(bc)–G2h1–FИ2h2–(FC+FИ3)pVc)=0,
Fур= (–FМИ2×bc+G2h1+FИ2h2 +(FC+FИ3)pVc)/ab
Уравновешивание рычажных механизмов
Метод замещающих масс:
Сместим центр масс звена АВ в точку А путем некоторого противовеса у точки А. Тоже самое проделываем для звена CD.
1)m1 + m2+ m3 + m4 = M
2) Smixi = 0
3) Smiyi = 0
Выше написанное является условием смещения центра масс.
4) Smi(xi2+yi2)=Js
Для второго звена: mB2×a = mC2×b –статические моменты,
mB2(a+b) = mC2b, mC2 = m×b/(a+b), mC2=m2×a/(a+b).
Для третьего звена:
mC3 = m3×d/(c+d), mD3 = m3×c/(c+d)
Рассмотрим равновесие первого звена:
mB2×AB = mдоп1×AA¢, mдоп1=mB2AB/AA¢, (mC2+mC3)×CD = mдоп2×DD¢, mдоп2 = (mС2+mС3)×CD/DD¢, (mB2+mдоп1)ASцмм = (mC2+mC3+mD+mдоп2)DSцмм, mSAAD = (mSA+mSD)SD, SD = AD×MSA/(mSA+mSD)
Уравнение удовлетворяет трем условиям: сумма по оси x и y = 0, сумма всех масс = общей массе.
Дата: 2019-07-24, просмотров: 289.