Налагая ограничения на авторегрессионные параметры, с тем чтобы они удовлетворяли рекурсивному выражению метода Левинсона, в методе Берга происходит минимизация по одного параметра - коэффициента отражения  . Более общий подход состоит в минимизации одновременно по всем коэффициентам линейного предсказания.
. Более общий подход состоит в минимизации одновременно по всем коэффициентам линейного предсказания.
Итак, пусть для оценивания авторегрессионных параметров порядка p используются последовательность данных  .Оценка линейного предсказания вперед порядка p для отсчета
.Оценка линейного предсказания вперед порядка p для отсчета  будет иметь форму:
будет иметь форму:
где  - коэффициенты линейного предсказания вперед порядка p.
- коэффициенты линейного предсказания вперед порядка p.
Ошибка линейного предсказания :

В матричном виде это выражение записывается как :
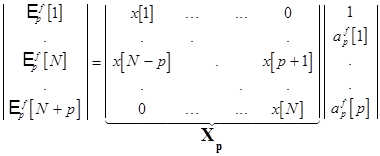
и соотношение для ошибки :

Однако если рассматривать, в котором минимизируется следующая, невзвешенная выборочная дисперсия :
то матрица  принимает теплицевый вид (далее ее будем обозначать
принимает теплицевый вид (далее ее будем обозначать  ).
).
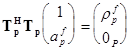
Нормальные уравнения, минимизирующие средний квадрат ошибки имеют следующий вид:
Элементы эрмитовой матрицы  имеют вид корреляционных форм
имеют вид корреляционных форм
 , где
, где 
Таким образом, авторегрессионные параметры могут быть получены в результате решения нормальных уравнений. Рассмотрим алгоритм, который в решении нормальных уравнений учитывает тот факт, что эрмитова матрица  получена как произведение двух теплицевых и в результате этого сводит количество вычислений к
получена как произведение двух теплицевых и в результате этого сводит количество вычислений к  . При использовании алгоритма Холецкого потребовалось бы
. При использовании алгоритма Холецкого потребовалось бы  операций.
операций.
Ошибки линейного предсказания вперед и назад p - ого порядка
Здесь вектор данных  , вектор коэффициентов линейного предсказания вперед
, вектор коэффициентов линейного предсказания вперед  и вектор линейного предсказания назад
и вектор линейного предсказания назад  определяется следующими выражениями:
определяется следующими выражениями:
 ,
,  ,
, 
На основе отсчетов измеренных комплексных данных  ковариационный метод линейного предсказания позволяет раздельно минимизировать суммы квадратов ошибок линейного предсказания вперед и назад:
ковариационный метод линейного предсказания позволяет раздельно минимизировать суммы квадратов ошибок линейного предсказания вперед и назад:
 ,
, 
что приводит к следующим нормальным уравнениям :
 ,
, 
Введем необходимые для дальнейшего определения :
 ,
, 
исходя из вида  и
и  можно записать :
можно записать :
 ,
,  ,
,
где вектор столбцы  и
и  даются выражениями :
даются выражениями :
 ,
, 
Важными также являются следующие выражения :


Пара векторов-столбцов  и
и  определяются из выражений :
определяются из выражений :

Аналогично определяются вектора  и
и  , а также
, а также  и
и  через матрицы
через матрицы  и
и  .
.
Процедура, используемая для обновления порядка вектора линейного предсказания вперед выглядит следующим образом :
 , где
, где  , в котором
, в котором

Соответствующий вид имеет процедура обновления порядка для вектора предсказания назад:
 , где
, где  ,
,

Векторы и  должны удовлетворять следующим рекурсиям обновления порядка:
должны удовлетворять следующим рекурсиям обновления порядка:
Используя тот факт, что  является эрмитовой матрицей имеем следующие выражения для
является эрмитовой матрицей имеем следующие выражения для  и
и  :
:
Введем скалярные множители


Соответствующие рекуррентные выражения для  и
и  имеют следующий вид :
имеют следующий вид :
Наконец, еще одна рекурсия обновления порядка необходима для вектора  :
:

Обновление временного индекса в векторе коэффициентов линейного предсказания вперед осуществляется в соответствии с выражением :
Выражение для обновления временного индекса у квадрата ошибки линейного предсказания вперед :

Аналогичным образом обновление временного индекса в векторе коэффициентов линейного предсказания назад ведется в соответствии с выражением :
Выражение для обновления временного индекса у квадрата ошибки линейного предсказания назад :

 ,
, 
где комплексный скаляр  удовлетворяет выражениям :
удовлетворяет выражениям :

Соответствующие рекурсии по временному индексу для действительных скаляров  и
и  даются следующими выражениями:
даются следующими выражениями:
 ,
, 
Начальные условия необходимы для того, чтобы начать рекурсивное решение с порядка равного нулю:
 ,
,  ,
,  ,
,
 ,
,  ,
,
 ,
, 
Экспериментальные результаты приведены в соответствующем разделе.
Дата: 2019-07-24, просмотров: 303.