Считаем, что после сеанса связи (если на данном направлении нет больше объектов) система переходит в режим поиска. ЦП излучает гармонический сигнал длительностью ТК, после чего переходит в режим приема и ожидает ответ от объектов. Если ответ получен, то ЦП переходит в режим определения координат объекта.
Энергетические соотношения в этом случае определяются вероятностью ложной тревоги F и надежностью связи РН при обнаружении сигнала со случайной амплитудой и фазой.
Зависимость вероятности правильного обнаружения от отношения сигнал/шум определяется формулой [4]:

Принимая вероятность правильного обнаружения равной надежности, находим порог обнаружения:
 ,
, 
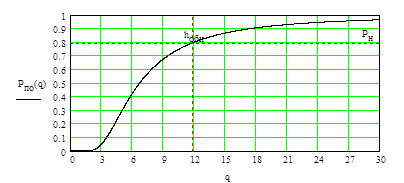
Рис. 4. График зависимости вероятности правильного обнаружения от отношения сигнал/шум
Тогда мощность принимаемого сигнала, которая будет обеспечивать выбранное отношение сигнал/шум, равна
 ,
,  Вт.
Вт.
Мощность передатчика наземной станции составляет [5]:
5. Выбор характеристик системы определения координат объекта
Радиоизмерительная система ЦП осуществляет поиск объектов, их опознавание по ответному сигналу, измерение заданных параметров взаимного расположения ЦП и объекта, прием и хранение информации. Точность измерения и разрешения координат объекта не хуже 1% от максимальной величины измеряемого параметра (угла или дальности), причем угловое или дальномерное разрешение измерителя в зоне поиска позволяет проводить сеанс связи только с одним из объектов. Запросно-ответная радиолиния ЦП–объект обеспечивает, заданную вероятность ложной тревоги F и выбранную вероятность правильного опознавания объекта, равную надежности связи РН [5].
Наиболее часто в РЛС используют последовательный метод обзора, при котором ДН антенны отклоняется в пределах заданного сектора (зоны) обзора. Обеспечение большой дальности действия (при ограничении энергии излучаемого сигнала) и чувствительности приемного устройства, а также повышение угловой разрешающей способности и точности системы возможно лишь за счет сужения ДН, что, в свою очередь, приводит к увеличению времени, необходимого для обзора заданного объема пространства [4].
Тогда, выбрав круговой способ обзора [1, 4], при котором ДН описывает круг, пространство сканирования ограничится координатами:
 – по дальности,
– по дальности,
 – по азимуту,
– по азимуту,
Движение ДН представляет собой круговое вращение по азимуту
Полагаем, что ДН перемещается равномерно, и каждый элемент сектора обзора находится в равных условиях, а для надежного обнаружения и для определения координат цели необходимо принять несколько сигнальных импульсов в пределах ДН, тогда скорость её отклонения должна быть снижена.
Дата: 2019-07-24, просмотров: 278.