Архитектура каждой компоненты МРС обусловлена тем набором функций, которые она должна выполнять, а именно:
F1 – иметь возможность обмениваться данными либо с центральной системой управления (для централизованного способа управления), либо с локальными подсистемами (для распределенного способа).
F2 – обеспечивать процесс принятия решения или планирования (для децентрализованного управления).
F3 – обеспечить координацию с другими подсистемами на этапе исполнения спланированного задания,
F4 – исполнять соответствующие подзадания, сформированные на этапе планирования.
Функция F1 является, вообще говоря, чисто технической и ее реализация состоит в поддержке соответствующих сетевых протоколов. Обеспечение функции F2 состоит в требовании иметь в составе подсистемы базу знаний для принятия решений. Функция F3 требует наличия механизма, приводящего в действие исполнение системой соответствующих подзаданий по сигналам, поступающим от других подсистем. При этом эти сигналы не должны требовать перепланирования задания в целом (например, неуспех при выполнении подзадания одной из подсистем). Выполнение функции F4 обеспечивается нижним уровнем локальной системы управления и аппаратными средствами подсистем.
Заметим, что если локальная система является сложной в смысле введенного в п. 2 определения, то процесс исполнения подзадания также может включать в себя этапы планирования и координации исполнения. Например, для мобильного робота, включающего в свой состав шасси, манипулятор и систему технического зрения, подзадание в форме «переместить объект А в позицию В» может быть распланировано следующим образом: t1 – манипулятор, убрать; t2 – TV, найти А; t3 – манипулятор, сменить схват; t4 – манипулятор, взять А; t5 – манипулятор, положить в В; с соответствующей координацией между подсистемами «манипулятор» и «TV» в процессе исполнения.
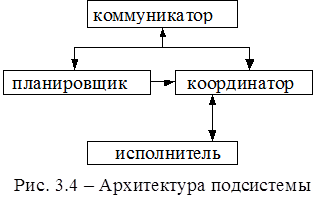
Таким образом, подсистема должна включать по крайней мере следующие 4 функционально различные компоненты (рис. 3.4):
- коммуникатор (F1);
- планировщик (F2);
- координатор (F3);
- исполнитель (F4).
4. Метод координации и планирования
Координация исполнения
Воспользуемся подходом, состоящим в представлении этого уровня системы управления как сети специальным образом построенных конечных автоматов.
Сетевой автомат
Назовем сетевым автоматом NA с p входами и q выходами следующий кортеж:
NA = <I, O, U, X, Z, f, h> (4.1)
где I = {i1, i2,…, ip} – множество входов;
O = {o1, o2,…, oq} – множество выходов;
U = {u1, u2,…, um} – входной алфавит;
X = {x1, x2,…, xn} – множество состояний;
Z = {z1, z2,…, zk} – выходной алфавит;
f: X´V®X – одношаговая переходная функция, где VÌU´I;
h: X´V®W – выходная функция, где WÌZ´O.
Элементы множеств V и W будем называть обобщенными входными и выходными алфавитами соответственно.
Введем дополнительно специальный символ e, который является элементом и входного и выходного алфавитов. Этот символ мы будем интерпретировать как пустой символ, который всегда присутствует на выделенном входе автомата, так что если в описании перехода из некоторого состояния присутствует входной символ e, тогда осуществляется соответствующий переход. Появление символа e в выходном канале означает, что на выход ничего не поступает. Здесь надо заметить, что полученный в результате автомат не является автоматом Мили, поскольку он не сохраняет длину отображения.
Далее при изображении графа сетевого автомата мы будем использовать следующую нотацию: через i.u будем обозначать символ входного алфавита uÎU, пришедший по входному каналу i Î I; через z.o будем обозначать символ выходного алфавита zÎZ, поступивший в выходной канал oÎO.
Введем теперь понятие сети автоматов как набора автоматов, объединенных своими входами и выходами и взаимодействующих путем передачи / приема символов своих выходных / входных алфавитов.
Назовем сетью автоматов L связный мультиграф:
L = (E, C), (4.2)
где E = {e1, e2,…, en} – множество вершин графа;
C = {c1, c2,…, cm} – множество направленных дуг, ci = (ej, ek).
Вершина графа интерпретируется как сетевой автомат, а дуга – как канал связи между автоматами, используемый для обмена элементами входных / выходных алфавитов.
Работа сети заключается в параллельном функционировании всех составляющих ее автоматов, поведение каждого из которых, в свою очередь, определяется его текущим состоянием, а также состоянием входных каналов.
Пусть теперь L = (E, C) – сеть автоматов, и пусть распределенная система состоит из подсистем, каждая из которых описывается конечным автоматом, так что M = {Mi} – множество моделей подсистем.
Тогда, если M Ì E, то
Lc = {Ec, Cc}, (4.3)
где Ec = E \ M, будем называть управляющей структурой для распределенной системы, представленной моделями {Mi}.
Ясно, что будучи соединенной с реальными подсистемами, управляющая структура обеспечит некоторое поведение подсистем, зависящее от топологии управляющей структуры и атрибутов сетевых автоматов, входящих в ее состав.
Дата: 2019-07-24, просмотров: 297.