Введение
Роботы – это физические агенты, которые выполняют поставленные перед ними задачи, проводя манипуляции в физическом мире. Для этой цели роботов оснащают исполнительными механизмами, такими как ноги, колеса, шарниры и захваты. Исполнительные механизмы имеют единственное назначение – прилагать физические усилия к среде. Кроме того, роботов оснащают датчиками, которые позволяют им воспринимать данные об окружающей их среде. В современных роботах применяются различные виды датчиков, включая те, что предназначены для измерения характеристик среды (например, видеокамеры и ультразвуковые дальномеры), и те, которые измеряют характеристики движения самого робота (например, гироскопы и акселерометры).
Большинство современных роботов можно отнести к одной из трех основных категорий. Роботы-манипуляторы, или роботы-руки, физически привязаны к своему рабочему месту, например на заводском сборочном конвейере или на борту Международной космической станции. В движении манипулятора обычно участвует вся цепочка управляемых шарниров, что позволяет таким роботам устанавливать свои исполнительные механизмы в любую позицию в пределах своего рабочего пространства. Манипуляторы относятся к типу наиболее распространенных промышленных роботов, поскольку во всем мире установлено свыше миллиона таких устройств. Некоторые мобильные манипуляторы используются в больницах в качестве ассистентов хирургов. Без робототехнических манипуляторов в наши дни не смогут продолжать свою производственную деятельность большинство автомобильных заводов, а некоторые манипуляторы использовались даже для создания оригинальных художественных произведений.
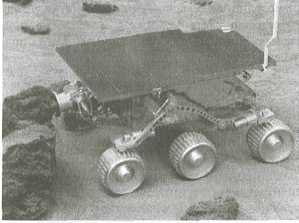
Ко второй категории относятся мобильные роботы. Роботы такого типа передвигаются в пределах своей среды с использованием колес, ног или аналогичных механизмов. Они нашли свое применение при доставке обедов в больницах, при перемещении контейнеров в грузовых доках, а также при выполнении аналогичных задач. Одним из примеров мобильного робота является автоматическое наземное транспортное средство (Unmanned Land Vehicle – ULV) NavLab, способное автономно передвигаться по автомагистралям в режиме самовождения. К другим типам мобильных роботов можно отнести автоматическое воздушное транспортное средство (Unmanned Air Vehicle – UAV), обычно используемое для воздушного наблюдения, химической обработки земельных участков и военных операций, автономное подводное транспортное средство (Autonomous Underwater Vehicle – AUV) для глубоководных морских исследованиях, и планетоход, такой как робот Sojourner, приведенный на рис. 1.1, а.
а) б)
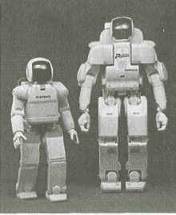
Рисунок. 1.1 – Фотографии широко известных роботов: движущийся робот Sojourner агентства NASA, который исследовал поверхность Марса в июле 1997 года (а); роботы-гуманоиды РЗ и Asimo компании Honda (б)
К третьему типу относятся гибридные устройства – мобильные роботы, оборудованные манипуляторами. В их число входят роботы-гуманоиды, которые по своей физической конструкции напоминают человеческое тело. Два таких робота-гуманоида показаны на рис. 1.1, б; оба они изготовлены в японской корпорации Honda. Гибридные роботы способны распространить действие своих исполнительных элементов на более обширную рабочую область по сравнению с прикрепленными к одному месту манипуляторами, но вынуждены выполнять стоящие перед ними задачи с большими усилиями, поскольку не имеют такой жесткой опоры, которую предоставляет узел крепления манипулятора.
Реальным роботам обычно приходится действовать в условиях среды, которая является частично наблюдаемой, стохастической, динамической и непрерывной. Некоторые варианты среды обитания роботов (но не все) являются также последовательными и мультиагентными. Частичная наблюдаемость и стохастичность обусловлены тем, что роботу приходится сталкиваться с большим, сложным миром. Робот не может заглянуть за каждый угол, а команды на выполнение движений осуществляются не с полной определенностью из-за проскальзывания приводных механизмов, трения и т.д. Кроме того, реальный мир упорно отказывается действовать быстрее, чем в реальном времени. В моделируемой среде предоставляется возможность использовать простые алгоритмы (такие как алгоритм Q-обучения), чтобы определить с помощью обучения необходимые параметры, осуществляя миллионы попыток в течение всего лишь нескольких часов процессорного времени, а в реальной среде для выполнения всех этих попыток могут потребоваться годы. Кроме того, реальные аварии, в отличие от моделируемых, действительно наносят ущерб. В применяемые на практике робототехнические системы необходимо вносить априорные знания о роботе, о его физической среде и задачах, которые он должен выполнять для того, чтобы быстро пройти обучение и действовать безопасно.
1. Анализ технического задания
Централизованное управление
Этот метод организации предполагает наличие центральной системы управления, которая планирует действия всех подсистем и затем координирует их взаимодействие в процессе исполнения (рис. 3.2) в соответствии с предварительно разработанным планом. Центральная система управления (ЦСУ) передает подсистеме задание, исполнение которого не требует какой-либо координации между подсистемами. Результат исполнения возвращается в ЦСУ. В зависимости от присланного результата ЦСУ посылает подсистеме следующее задание, и далее процесс повторяется. Заметим, что физически ЦСУ может быть реализована либо как отдельное устройство, либо на базе системы управления одной из компонент МРС.
Распределенное управление
При таком способе организации управления отсутствует центральная система, и процессы планирования заданий и координация в процессе исполнения реализуются путем обмена сообщениями между подсистемами (рис. 3.3). На этапе планирования осуществляется переговорный процесс, результатом которого является согласованный план исполнения задания. Реализация этого плана происходит на этапе исполнения и состоит в выполнении подзаданий и обмене результатами их исполнения. Строго говоря, при такой организации нельзя говорить об управлении распределенной системой, поскольку, в отличие от централизованной организации, отсутствует явно выраженный носитель управления, обеспечивающий требуемое поведение системы: все подсистемы являются равноправными как на этапе планирования, так на этапе исполнения.
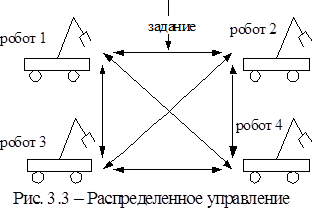
Таким образом, централизованное управление реализует иерархический способ организации системы, состоящий в частности в том, что управление является многоуровневым с явным подчинением нижних уровней (локальных систем управления) верхним (центральной системе управления). Все обмены сообщениями между подсистемами происходит не напрямую, а через верхний уровень. Распределенное управление реализует гетерархический способ организации, когда все компоненты системы равноправны и процесс планирования осуществляется параллельно всеми подсистемами.
Координация исполнения
Воспользуемся подходом, состоящим в представлении этого уровня системы управления как сети специальным образом построенных конечных автоматов.
Сетевой автомат
Назовем сетевым автоматом NA с p входами и q выходами следующий кортеж:
NA = <I, O, U, X, Z, f, h> (4.1)
где I = {i1, i2,…, ip} – множество входов;
O = {o1, o2,…, oq} – множество выходов;
U = {u1, u2,…, um} – входной алфавит;
X = {x1, x2,…, xn} – множество состояний;
Z = {z1, z2,…, zk} – выходной алфавит;
f: X´V®X – одношаговая переходная функция, где VÌU´I;
h: X´V®W – выходная функция, где WÌZ´O.
Элементы множеств V и W будем называть обобщенными входными и выходными алфавитами соответственно.
Введем дополнительно специальный символ e, который является элементом и входного и выходного алфавитов. Этот символ мы будем интерпретировать как пустой символ, который всегда присутствует на выделенном входе автомата, так что если в описании перехода из некоторого состояния присутствует входной символ e, тогда осуществляется соответствующий переход. Появление символа e в выходном канале означает, что на выход ничего не поступает. Здесь надо заметить, что полученный в результате автомат не является автоматом Мили, поскольку он не сохраняет длину отображения.
Далее при изображении графа сетевого автомата мы будем использовать следующую нотацию: через i.u будем обозначать символ входного алфавита uÎU, пришедший по входному каналу i Î I; через z.o будем обозначать символ выходного алфавита zÎZ, поступивший в выходной канал oÎO.
Введем теперь понятие сети автоматов как набора автоматов, объединенных своими входами и выходами и взаимодействующих путем передачи / приема символов своих выходных / входных алфавитов.
Назовем сетью автоматов L связный мультиграф:
L = (E, C), (4.2)
где E = {e1, e2,…, en} – множество вершин графа;
C = {c1, c2,…, cm} – множество направленных дуг, ci = (ej, ek).
Вершина графа интерпретируется как сетевой автомат, а дуга – как канал связи между автоматами, используемый для обмена элементами входных / выходных алфавитов.
Работа сети заключается в параллельном функционировании всех составляющих ее автоматов, поведение каждого из которых, в свою очередь, определяется его текущим состоянием, а также состоянием входных каналов.
Пусть теперь L = (E, C) – сеть автоматов, и пусть распределенная система состоит из подсистем, каждая из которых описывается конечным автоматом, так что M = {Mi} – множество моделей подсистем.
Тогда, если M Ì E, то
Lc = {Ec, Cc}, (4.3)
где Ec = E \ M, будем называть управляющей структурой для распределенной системы, представленной моделями {Mi}.
Ясно, что будучи соединенной с реальными подсистемами, управляющая структура обеспечит некоторое поведение подсистем, зависящее от топологии управляющей структуры и атрибутов сетевых автоматов, входящих в ее состав.
Планирование исполнения информационно-двигательных действий
Рассмотрим сначала метод планирования задания для централизованной системы. Суть подхода состоит в выполнении двухшаговой процедуры:
Шаг 1. На основе методов искусственного интеллекта найти последовательность подзаданий, выполняемых каждой из подсистем и сформированных в терминах входных алфавитов подсистем.
Шаг 2. Преобразовать эти последовательности в управляющую структуру, которая обеспечит координацию исполнения сформированного задания.
Обсудим более детально эту процедуру. В качестве метода решения задачи планирования будем использовать исчисление предикатов первого порядка. Входная информация, необходимая для решения задачи планирования, состоит из следующих компонент, содержащих описание:
К1 – возможностей каждой из подсистем,
К2 – начального состояния,
К3 – задания,
К4 – универсальных свойств.
Компонента К1 включает набор предложений (правил), отражающих возможности каждой подсистемы изменять состояние внешней среды (перемещение объектов, получение информации об объектах и т.д.). Отличительной особенностью этой компоненты является наличие сколемовской функции, относящейся к одной из подсистем. Множество К2 включает факты, описывающие начальное состояние системы. Компонента К3 представляет собой формулировку задания. Множество К4 описывает универсальные свойства, не зависящие от подсистем, входящих в состав МРС (это множество может быть пусто). Элементы всех множеств представляют собой правильно построенные формулы (ППФ) в исчислении предикатов 1‑го порядка.
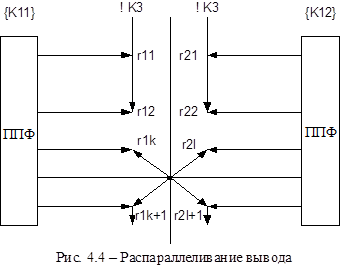
Задача планирования состоит в получении последовательности операторов, обеспечивающих выполнение цели. При этом для обеспечения максимально возможного распараллеливания процесса исполнения представим множество К1 в виде:
 (4.6)
(4.6)
где N – множество подсистем.
Таким образом, каждое подмножество К1i содержит только ППФ, отражающие возможности i‑ой подсистемы. После осуществления такого разбиения будем строить резолюции rij, и не-цели с элементами К1i настолько долго, насколько это возможно. Если этот процесс невозможно продолжить, оставаясь в К1i (это означает, что на этом этапе исполнения необходимо взаимодействие между подсистемами), строим резолюции с соседними подмножествами. Такой процесс обеспечит (в случае успеха) получение последовательности операторов, относящихся к каждой из подсистем, а также точек координации их взаимодействия. Далее полученные результаты используются для преобразования в управляющую структуру, обеспечивающую исполнение сформированного плана (рис. 4.4).
Введение
Роботы – это физические агенты, которые выполняют поставленные перед ними задачи, проводя манипуляции в физическом мире. Для этой цели роботов оснащают исполнительными механизмами, такими как ноги, колеса, шарниры и захваты. Исполнительные механизмы имеют единственное назначение – прилагать физические усилия к среде. Кроме того, роботов оснащают датчиками, которые позволяют им воспринимать данные об окружающей их среде. В современных роботах применяются различные виды датчиков, включая те, что предназначены для измерения характеристик среды (например, видеокамеры и ультразвуковые дальномеры), и те, которые измеряют характеристики движения самого робота (например, гироскопы и акселерометры).
Большинство современных роботов можно отнести к одной из трех основных категорий. Роботы-манипуляторы, или роботы-руки, физически привязаны к своему рабочему месту, например на заводском сборочном конвейере или на борту Международной космической станции. В движении манипулятора обычно участвует вся цепочка управляемых шарниров, что позволяет таким роботам устанавливать свои исполнительные механизмы в любую позицию в пределах своего рабочего пространства. Манипуляторы относятся к типу наиболее распространенных промышленных роботов, поскольку во всем мире установлено свыше миллиона таких устройств. Некоторые мобильные манипуляторы используются в больницах в качестве ассистентов хирургов. Без робототехнических манипуляторов в наши дни не смогут продолжать свою производственную деятельность большинство автомобильных заводов, а некоторые манипуляторы использовались даже для создания оригинальных художественных произведений.
Ко второй категории относятся мобильные роботы. Роботы такого типа передвигаются в пределах своей среды с использованием колес, ног или аналогичных механизмов. Они нашли свое применение при доставке обедов в больницах, при перемещении контейнеров в грузовых доках, а также при выполнении аналогичных задач. Одним из примеров мобильного робота является автоматическое наземное транспортное средство (Unmanned Land Vehicle – ULV) NavLab, способное автономно передвигаться по автомагистралям в режиме самовождения. К другим типам мобильных роботов можно отнести автоматическое воздушное транспортное средство (Unmanned Air Vehicle – UAV), обычно используемое для воздушного наблюдения, химической обработки земельных участков и военных операций, автономное подводное транспортное средство (Autonomous Underwater Vehicle – AUV) для глубоководных морских исследованиях, и планетоход, такой как робот Sojourner, приведенный на рис. 1.1, а.
а) б)
Рисунок. 1.1 – Фотографии широко известных роботов: движущийся робот Sojourner агентства NASA, который исследовал поверхность Марса в июле 1997 года (а); роботы-гуманоиды РЗ и Asimo компании Honda (б)
К третьему типу относятся гибридные устройства – мобильные роботы, оборудованные манипуляторами. В их число входят роботы-гуманоиды, которые по своей физической конструкции напоминают человеческое тело. Два таких робота-гуманоида показаны на рис. 1.1, б; оба они изготовлены в японской корпорации Honda. Гибридные роботы способны распространить действие своих исполнительных элементов на более обширную рабочую область по сравнению с прикрепленными к одному месту манипуляторами, но вынуждены выполнять стоящие перед ними задачи с большими усилиями, поскольку не имеют такой жесткой опоры, которую предоставляет узел крепления манипулятора.
Реальным роботам обычно приходится действовать в условиях среды, которая является частично наблюдаемой, стохастической, динамической и непрерывной. Некоторые варианты среды обитания роботов (но не все) являются также последовательными и мультиагентными. Частичная наблюдаемость и стохастичность обусловлены тем, что роботу приходится сталкиваться с большим, сложным миром. Робот не может заглянуть за каждый угол, а команды на выполнение движений осуществляются не с полной определенностью из-за проскальзывания приводных механизмов, трения и т.д. Кроме того, реальный мир упорно отказывается действовать быстрее, чем в реальном времени. В моделируемой среде предоставляется возможность использовать простые алгоритмы (такие как алгоритм Q-обучения), чтобы определить с помощью обучения необходимые параметры, осуществляя миллионы попыток в течение всего лишь нескольких часов процессорного времени, а в реальной среде для выполнения всех этих попыток могут потребоваться годы. Кроме того, реальные аварии, в отличие от моделируемых, действительно наносят ущерб. В применяемые на практике робототехнические системы необходимо вносить априорные знания о роботе, о его физической среде и задачах, которые он должен выполнять для того, чтобы быстро пройти обучение и действовать безопасно.
1. Анализ технического задания
Область применения и цель построения подсистемы
Разрабатываемая подсистема, называемая «Подсистемой планирования действий интеллектуального робота» предназначена для планирования целенаправленных действий интеллектуального мобильного робота в противодействующей, априорно неопределенной среде функционирования. Цель разработки – информационное моделирование функционирования интеллектуального робота на информационном уровне организации тактико-технического планирования информационно-двигательных действий (ИДД) мобильного робота. На этапе разработки подобная модель подсистемы отсутствовала и планирование не производилось, основываясь лишь на жестком алгоритме отработки заданной траектории перемещения исполнительных подсистем робота. Отсутствие обратной связи с выполняемыми операциями указывает на малую гибкость системы в целом, что значительно сокращает возможности применения ПР в реальных условиях автоматизированного производства. Непосредственная эксплуатация такой системы сталкивается со следующими проблемами:
- необходимость создания гибкой распределенной структуры гибких производственных модулей;
- решение задач временного согласования работы нескольких роботов при выполнении единой задачи;
- необходимость изменения управляющей программы при переходе в новые не структурированные производственные участки, где сказывается сложность ввода траектории отработки технологической операции роботом.
Основным недостатком является жёсткое требование к точности задания эталонной траектории, нарушение которой в процессе работы ведёт к нарушению исполнения всего ТП, при этом такую ситуацию сложно автоматически скорректировать, – необходимо интеллектуальное планирование действий.
Дата: 2019-07-24, просмотров: 349.