Рассчитаем время ввода данных, их обработки и выдачи управляющего сигнала для одного канала. Для этого сложим время выполнения всех команд и учтём время преобразования на АЦП.
При внешней частоте в 4 МГц получим не более 672 мкс.
Для всех четырёх каналов получим не более 2.7 мс.
Частота опроса каналов не менее 0,37 кГц.
ЗАКЛЮЧЕНИЕ
В результате курсового проектирования была разработана система автоматической подстройки частоты на основе однокристальной ЭВМ КР1816ВЕ51 со следующими параметрами: потребляемая мощность: 3,1 Вт, число обсуживаемых каналов – 4, частота опроса не менее 0,37 кГц.
Разработка системы была проведена с учетом требований, указанных в техническом задании.
Система обеспечивает индикацию канала, в котором отклонение текущей частоты от заданной превышает определённое значение.
Была разработана принципиальная схема устройства, алгоритм управления и программа на языке ассемблер для микроконтроллеров серии MCS-51.
Разработанная система может применяться регулировки частоты в различных устройствах и приборах.
Список использованной литературы
1. В.Б. Бродин, М.И. Шагурин – Микроконтроллеры. Справочник. /М.; Издательство ЭКОМ, 1999 г. – 400 с.
2. Е.В. Вениаминов – Микросхемы и их применение. Справ. Пособие. / М.; Радио и связь, 1989г. – 240 с.
3. В.Г. Гусев, Ю.М. Гусев – Электроника. Учебное пособие / М.; Высшая школа, 1990 г. – 622 с.
4. Ф.В. Шульгин – Справочник по аналоговым микросхемам / М., 1997 г.
ПРИЛОЖЕНИЕ 1.
Алгоритмы управления САПЧ.
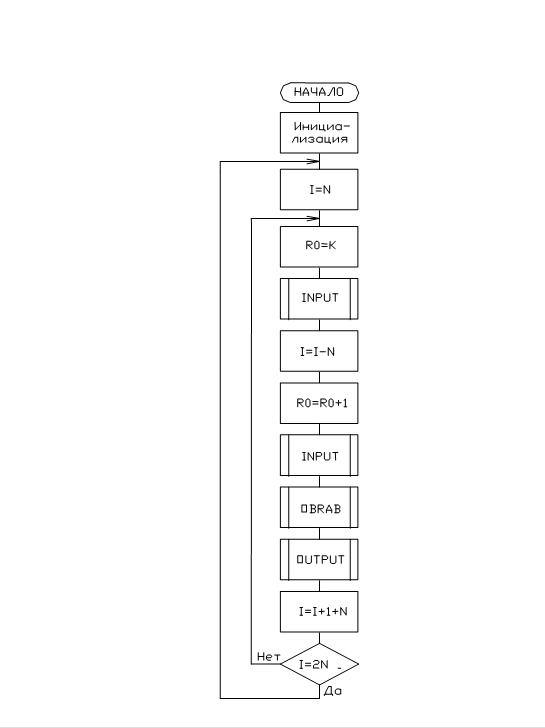
Рис.1. Главный алгоритм работы системы.
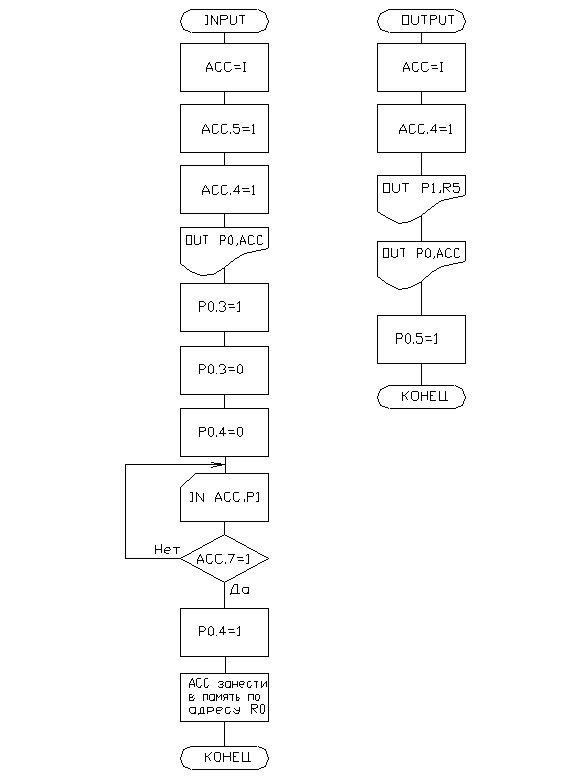
Рис.2. Алгоритмы процедуры ввода INPUT и процедуры вывода OUTPUT.
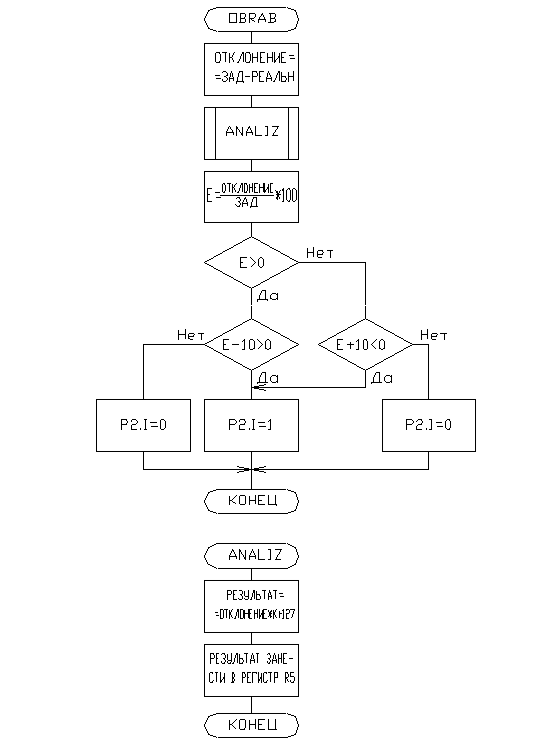
Рис.3. Алгоритм обработки входных сигналов и подготовки результатов.
ПРИЛОЖЕНИЕ 2.
Программа работы микроконтроллера.
N EQU 4
K EQU 31
INIT: SEL RB0 ;выбор банка регистров
L1: MOV R2,N ;занести номер канала
L2: MOV R0,#20H ;занести в РПД адрес памяти для данных
АCALL INPUT;чтение данных
MOV A,R2 ;
SUBB A,N ;
MOV R2,A ;R2=R2-N
INC R0 ;увеличить адрес на 1
АCALL INPUT ;чтение данных
АCALL OBRAB ;обработка данных
АCALL OUTPUT;вывод результата
MOV A,R2;
INC ;
ADD A,N ;
MOV R2,A;R2=R2+1+N
MOV A,N ;
MOV B,#2 ;
MUL AB ;A=2*N
SUBB A,R2;
JZ L1;сравнение A и R2
АJMP L2;переход на L2
RET
INPUT: MOV A,R2 ;процедура чтения данных из порта
SETB ACC.5
SETB ACC.4
OUT P0,A ;вывод в Р0 адреса
SETB PO.3 ;запуск УВХ
CLR P0.3;
CLR P0.4 ;запуск АЦП
L3: IN A,P1;чтение из Р1
JNB ACC.7 L3;проверка готовности АЦП
CLR ACC.7;ст. бит аккумулятора равен 0
SETB PO.4
MOV @R0,A;занести считанные данные в память
RET
OUTPUT: MOV A,R2;процедура вывода результатов
SETB ACC.4
OUT P1,R5;вывод в Р1
OUT P0,A ;вывод в Р0 адреса
SETB P0.5
RET
OBRAB: DEC RO;адрес значения пульта оператора
MOV A,@R0;значение пульта оператора в акк.
INC R0;адрес значения датчика
SUBB A,@R0;отклонение между пультом оператора и датчиком
MOV R4,A ;отклонение в регистр 4
АCALL ANALIZ ;процедура обработки и получения сигнала управления
MOV A,R4 ;значения отклонения в акк.
MOV B,#100;
MUL AB;умножить отклонение на 100%
DEC R0;адрес значения пульта оператора
MOV B,@R0;значение пульта оператора в В
DIV AB;разделить отклонение на значение пульта оператора
JB ACC.7 NEG;переход если погрешность <0
SUB A,#10 ;вычесть 10% из погрешности
JNB ACC.7 INDIK1;если погрешность > 10% индикация
АSJMP INDIK2
NEG: ADD A,#10
JB ACC.7 INDIK1 ;если погрешность > 10% индикация
АJMP INDIK2
INDIK1: SETB P2.R2
АJMP KON
INDIK2: CRL P2.R2
KON: RET
ANALIZ: MOV B,K;в регистр B значение коэффициента пропорциональности
MUL AB ;умножить отклонение на коэффициент
ADD A,#127;прибавить макс. зн-е результата деленное на 2 =127
MOV R5,A;занести результат в регистр 5
RET
Дата: 2019-05-29, просмотров: 295.