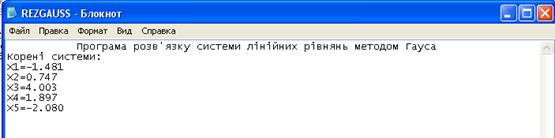
Рис. 2.4 - Результати розрахунку за методом Гауса:
3 РОЗРОБИТИ ПРОГРАМУ ДЛЯ ОБРАХУНКУ ТА ГРАФІЧНОГО ВІДОБРАЖЕННЯ ЗОВНІШНЬОЇ ШВИДКІСНОЇ ХАРАКТЕРИСТИКИ ЛЕГКОВОГО АВТОМОБІЛЯ
3.1 Теоретичні відомості
Загальновизнаними механічними характеристиками ДВЗ вважаються швидкісна та вантажна.
Швидкісна характеристика – сукупність залежностей Nе (  ), Ме (
), Ме (  ), ge (
), ge (  ) при сталому органі керування подачі палива. Якщо орган керування доведений до упору, то відповідна характеристика зовнішньою.
) при сталому органі керування подачі палива. Якщо орган керування доведений до упору, то відповідна характеристика зовнішньою.
Вантажна характеристика – сукупність залежностей годинної  та питомої
та питомої  витрати палива від потужності Nе (при
витрати палива від потужності Nе (при  та змінному положенні органу керування подачею палива).
та змінному положенні органу керування подачею палива).
Для аналізу руху АТЗ достатньо швидкісних характеристик. На рис. 1 наведено графіки зміни основних показників енергетики та динаміки АТЗ залежно від частоти обертання маховика при доведеному до упору органі керування, тобто швидкісні зовнішні характеристики, що визначають граничні функціональні якості двигуна включно до кутової швидкості розносу  .
.
Аналіз графіків показує, що у всьому діапазоні зміни частоти обертання маховика годинні витрати палива  зростають, а криві питомих витрат палива
зростають, а криві питомих витрат палива  мають екстремум. Це особливість усіх типів ДВЗ.
мають екстремум. Це особливість усіх типів ДВЗ.
Характерною для дизеля є незначна зміна питомих витрат палива у робочому діапазоні частот обертання маховика (близько 5%), у карбюраторного двигуна ця залежність значно більша.
Зазначимо, що початкові ділянки кривих Nе (  ), Ме (
), Ме (  ) для теорії АТЗ істотного інтересу не становлять, оскільки двигун працює тут нестійко.
) для теорії АТЗ істотного інтересу не становлять, оскільки двигун працює тут нестійко.
Робочий діапазон частот обертання:


Діапазон  називається зоною перевантаження двигуна, а
називається зоною перевантаження двигуна, а  зоною недовантаження. Фізичне значення таких назв полягає у тому, що зменшення частоти обертання в зоні призводить до збільшення моменту, тобто з'являється деяке перевантаження ДВЗ. У зоні ж
зоною недовантаження. Фізичне значення таких назв полягає у тому, що зменшення частоти обертання в зоні призводить до збільшення моменту, тобто з'являється деяке перевантаження ДВЗ. У зоні ж  спрацьовує обмежник частоти обертання вала, тому двигун працює з недовантаженням.
спрацьовує обмежник частоти обертання вала, тому двигун працює з недовантаженням.
За характерними точками зовнішньої характеристики визначаються параметри двигуна як джерела енергії. До них належать прямі показники – це максимальні потужність  і момент
і момент  , питомі витрати палива
, питомі витрати палива  та посередні – ефективний ККД
та посередні – ефективний ККД  , коефіцієнти пристосування двигуна до зміни опору руху
, коефіцієнти пристосування двигуна до зміни опору руху  , швидкості
, швидкості  та витрат палива kg в умовах експлуатації:
та витрат палива kg в умовах експлуатації:
 kM = Mem / MeN
kM = Mem / MeN
де Меm, MeN – ефективні моменти, максимальний і такий, що відповідає максимальній потужності;


 частоти обертання маховика, що відповідають Меm та MeN;
частоти обертання маховика, що відповідають Меm та MeN;

 – питомі витрати палива при
– питомі витрати палива при  ,
,  .
.
Чим вище значення цих коефіцієнтів, тим більша внутрішня автоматичність саморегулювання двигуна і тим ширший може бути діапазон зміни ефективної швидкості руху. Ці властивості двигуна перш за все треба враховувати під час вибору кількості передач і передаточних чисел трансмісії.
У сучасних двигунах АТЗ коефіцієнти пристосовності неоднакові і залежно від конструкції змінюються:
 = 1,06 ... 1,35;
= 1,06 ... 1,35;  = 2,25 ... 1,4.
= 2,25 ... 1,4.
Для практичних розрахунків та наукових досліджень треба характеристику двигуна виразити математично. Зовнішня швидкісна характеристика з достатньою точністю описується параболами другого або третього порядків:

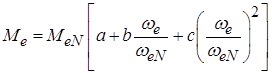

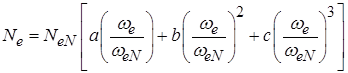
де й, b, c — емпіричні константи.
Зазначимо, що параметри параболи можна визначати різними методами залежно від потрібної точності. Так, експериментальну криву можна описати перекинутою параболою, або параболою, що проходить по характерним точкам, наприклад по  , або просто відрізками прямих ліній з координатами
, або просто відрізками прямих ліній з координатами  і
і  . Здебільшого використовується перекинута парабола. У такому разі її коефіцієнти визначаються звичайним способом аналітичної геометрії:
. Здебільшого використовується перекинута парабола. У такому разі її коефіцієнти визначаються звичайним способом аналітичної геометрії:



3.2 Необхідні початкові дані
– максимальна потужність двигуна  , кВт;
, кВт;
– максимальний крутний момент двигуна  , Н·м;
, Н·м;
– питома витрата палива  , г/кВт·год;
, г/кВт·год;
– кількість обертів двигуна при максимальній потужності  ;
;
– кількість обертів двигуна при максимальному моменті  ;
;
– табличні дані з графіків зовнішньої швидкісної характеристики.
3.3 Формалізація задачі
Для вирішення даної задачі необхідно за даними графіків зовнішньої швидкісної характеристики двигуна J6R створити математичні моделі його механічних характеристик.
Апроксимування функцій будемо виконувати за допомогою методу найменших квадратів.
Функція  на відрізку [а, в] задана системою N точок
на відрізку [а, в] задана системою N точок  ,
,  , … ,
, … ,  .
.
Потрібно так підібрати коефіцієнти  полінома
полінома

щоб сума квадратів відхилення полінома від заданих значень функції

була мінімальною.
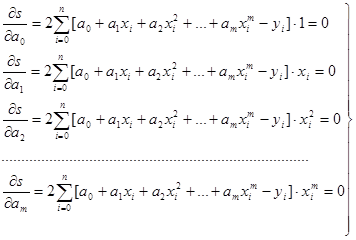
Використовуючи умову екстремуму функції кількох змінних:


можна скласти систему лінійних алгебраїчних рівнянь, відносно коефіцієнтів  .
.
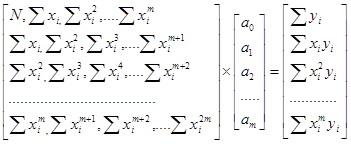
Якщо в якості апроксимуючого полінома вибрати степеневий поліном виду


та


то система рівнянь буде мати вигляд (3.15).

Ця система рівнянь лінійна відносно  коефіцієнта полінома
коефіцієнта полінома  і розв'язується будь-яким відомим методом (методом Гаусса з послідовним включенням, методом Гаусса за схемою Халецького і т.п.).
і розв'язується будь-яким відомим методом (методом Гаусса з послідовним включенням, методом Гаусса за схемою Халецького і т.п.).
Таким чином, алгоритм МНК включає три етапи:
1. Формування системи рівнянь.
2. Розв"язання системи лінійних алгебраїчних рівнянь та знаходження коефіцієнтів апроксимуючого полінома 

3. Вибір "оптимального" (найкращого) степеня  апроксимуючого полінома, за заданою припущеною похибкою метода
апроксимуючого полінома, за заданою припущеною похибкою метода  .
.
При розробці алгоритма і програми формування системи рівнянь необхідно скористатись тим, що в матриці коефіцієнтів знаходяться суми
від  до
до  ;
;
від  до
до  :
:

3.4 Розробка алгоритмів розв’язання задачі
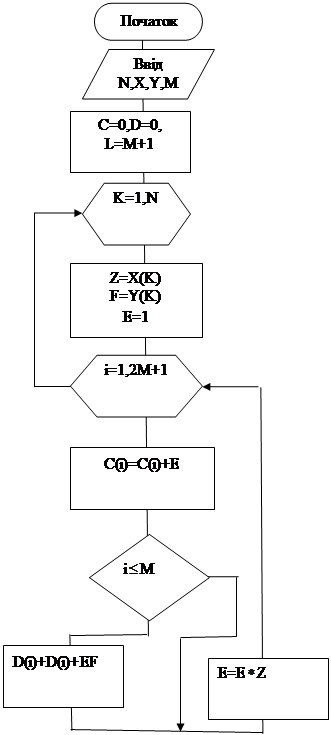 |
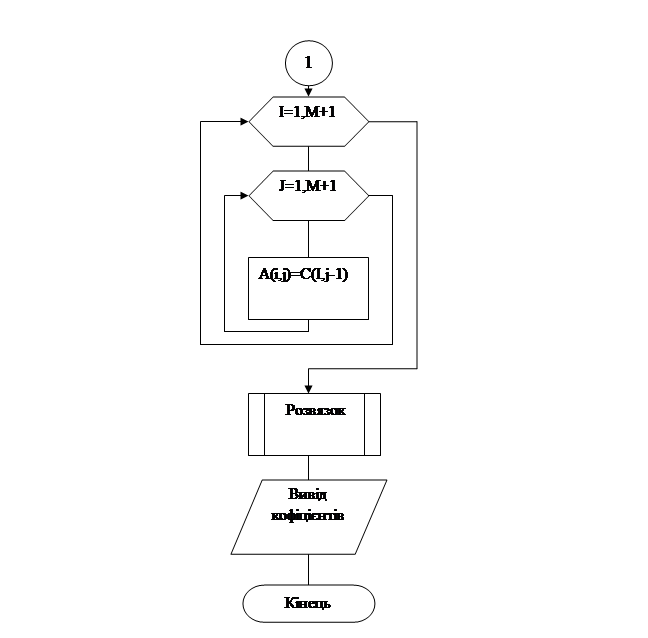
Рис.10 – схема алгоритму метода найменших квадратів для знаходження коефіцієнтів степеневого апроксимуючого полінома
3.5 Вибір типу та структури оброблюваних даних
В процесі розв’язку поставленої задачі оброблюються дані наступного типу:
Таблиця 3.1
| Тип | Область значень | Фізичний формат |
| Integer | від –2147483648 до 2147483647 | 32 розряди, зі знаком |
| Real | від 2,91-39 до 1,7138 | Точність 11-12 розрядів, розмір в байтах – 6 |
З метою збереження і обробки в пам’яті ЕОМ прийнята така система ідентифікаторів:
Таблиця 3.2
| Назва параметра | Позначення | |
| у формулі | у програмі | |
| Масив даних крутного момента | 
| с[i] |
| Масив даних питомої витрати паливаа | 
| b[i] |
| Масив даних кількості обертів колінчастого валу | 
| n[i] |
| Масив коефіцієнтів полінома | 
| a[i] |
| Кількість коефіцієнтів | 
| m |
| Інші | – | n1, e1, t, h, a1, b1, b2, eps, s, s0, i, j, k, k2, n2, i1, i3, i2, j1, j3, j2, m1, z1, f, e |
3.6 Програмування задачі на мові програмування pascal 7.0
Program Aproksimatsia;
Uses CRT;
Type mas= array[1..25,1..25] of real;
mas1= array[1..25] of real;
Var
a: mas;
c,b,x,x1,y1: mas1;
n,n1,i1,i3,i2,j1,j3,j2,m1: integer;
e1: real;
t,h,a1,b1,b2,eps,s,s0:real;
i,j,k,n2:integer;
Procedure MNK(n1:integer;x1,y1:mas1;var a:mas);
Var
k2:integer; z1,f,e : real;
BEGIN
for k2:=1 to n1 do
begin
z1:=x1[k2]; f:=y1[k2]; e:=1;
for i2:=1 to 2*m1+1 do
begin
c[i2]:=c[i2]+e;
if i2<=m1+1 then b[i2]:=b[i2]+e*f;
e:=e*z1
end;
end;
for i2:=1 to m1+1 do
begin
for j2:=1 to m1+1 do
a[i2,j2]:=c[i2+j2-1];
end;
END;
Procedure Gaus(n:integer;a:mas; b:mas1; var x:mas1);
Var
i,j,k,l:integer; max,z,s,m : real;
BEGIN
writeln('**** Vixidna sistema rivnyan ****');
for i:=1 to n do
begin
for j:=1 to n do write(' ',a[i,j]:5:2); write(' ',b[i]:5:2);
WRITELN;
end;
WRITELN;
for k:=1 to n-1 do
begin
max:=abs(a[k,k]); l:=k;
for i:=k+1 to n do
begin
if abs(a[i,k])>max then
begin l:=i; max:=abs(a[i,k]); end;
end;
if l<>k then begin
for j:=k to n do
begin
z:=a[l,j]; a[l,j]:=a[k,j]; a[k,j]:=z;
end;
z:=b[l]; b[l]:=b[k]; b[k]:=z;
end;
for i:=k+1 to n do
begin
m:=a[i,k]/a[k,k];
for j:=k to n do a[i,j]:=a[i,j]-m*a[k,j];
b[i]:=b[i]-m*b[k];
a[i,k]:=0;
end;
end;
Writeln('*** trikytna sistema rivnayn ***');
for i:=1 to n do
begin
for j:=1 to n do write(' ',a[i,j]:5:2); write(' ',b[i]:5:2);
WRITELN;
end;
writeln;
(*** xod nazad ***)
x[n]:=b[n]/a[n,n];
for i:=n-1 downto 1 do
begin
s:=0;
for j:=i+1 to n do s:=s+x[j]*a[i,j];
x[i]:=(b[i]-s)/a[i,i];
end;
END;
Function q(t:real):real;
BEGIN
q:=x[1]+x[2]*t+x[3]*t*t+x[4]*t*t*t;
END;
procedure simpson(a1,b1:real;n2:integer;var s:real);
var
hs:real;e,i:integer;
begin
hs:=(b1-a1)/(2*n2);
s:=q(a1)+q(b1);
e:=1;
for i:=1 to 2*n2-1 do
begin
s:=s+(3+e)*q(a1+i*hs);
e:=-e;
end;
s:=s*hs/3;
end;
BEGIN
Clrscr;
write('vedit kilkistto4ok tabli4noi fynksi N=');readln(n1);
{ctepin polimena} m1:=3;
writeln('vedit vixidni to4ki');
for i3:=1 to n1 do begin
read(x1[i3]); read(y1[i3]);
WRITELN;
end;
writeln('_________________________');
writeln('vihidni dani');
for i3:=1 to n1 do
begin
write(' ',x1[i3]:5:2); write(' ',y1[i3]:5:2);
WRITELN;
end;
c[1]:=0; b[1]:=0;
MNK (n1,x1,y1,a);
for i2:=1 to m1+1 do n:=n+1;
Gaus(n,a,b,x);
writeln('*** vektor rozvyazky ***');
writeln;
for i1:=1 to n do writeln('x[',i1,']=',x[i1]:7:3);
{kofisienti zapicyutsya a0+a1*x+a2*x^2+a3*x^3+...=const}
write(' q(t)'); write(' y');
writeln;
for i3:=1 to n1 do
begin
e1:=e1+Sqr(q(x1[i3])-y1[i3]);
write(' ',q(x1[i3]):7:3); write(' ',y1[i3]:7:3);
writeln;
end;
writeln('poxibka aproksimasyi',e1:7:5);
write('введіть b2=');read(b2);
a1:=0; b1:=b2/10;
eps:=0.001;
repeat
k:=2;
simpson(a1,b1,k,s);
repeat
s0:=s; k:=k*2;
simpson(a1,b1,k,s);
writeln('b1=',b1:5:2,' s=',s:5:2);
until (abs(s-s0)<=eps)or(k>500);
b1:=b1+b2/10;
until b1>b2;
END.
3.7 Відлагодження програми
Виправлення синтаксичних помилок на підставі повідомлень транслятора. Після написання програми транслятор знайшов ні помилку у 149-му рядку з повідомленням “Error 26: type mismatsh
I, j, k, n2: integer;
Після заміни real на integer, програма була запущена транслятором на виконання.
Таблиця 3.3 – Результати контролю правильності розв’язання задачі
| Вихідні дані | Результати розрахунків | ||||||
| ППП MathCad 2000
| Програма на мові Turbo Pascal | ||||||

| 
| 
|
|
|
|
| |
| 400 800 1200 1600 2000 2400 2800 3200 3600 4000 4400 4800 5200 5600 | 36,3 45,5 54,6 56,1 52,5 66,6 67,9 71,3 65,5 66,4 63,3 55,9 52,6 51,3 | 353 342 3541 332 328 325 319 314 324 330 331 346 353 360 | 34.47-0.123x+0.028x2-0.0012x3 | 421.53-2.37x+0.452x2+0.072x3 | 31.71-0.12x+0.027x2-0.001x3 | 417.32-2.41x+0.457x2+0.07x3 | |
ВИСНОВОК
В результаті виконаної роботи були розраховані основні параметри диференціала автомобіля, за результатами розрахунків ми дізнались параметри диференціала. Основна мета було Визначити які навантаження може витримати диференціал .
Склавши програму по розрахунку системи лінійних рівнянь методом Гауса розрахували коефіцієнти системи. Знайдені коефіцієнти х  =-1,4, х
=-1,4, х  =0,76, х
=0,76, х  =4,003, х
=4,003, х  =1,897, х
=1,897, х  =-2,080, Таким чином у нас є 5 чисел які заміняють невідомі.
=-2,080, Таким чином у нас є 5 чисел які заміняють невідомі.
Розрахували швидкісну характеристику автомобіля і склали таблицю яку можна роздрукувати. З таблиці видно що з більшання обертів і зростає навантаження.
ПЕРЕЛІК ПОСИЛАНЬ
1. Смирнов Г.А. Теория движения колесных машин. – М.: Машиностроение, 1981.- 271с.
2. Кошарний М.Ф. Основи механіки та енергетики автомобіля. – Київ: Вища школа, 1992. – 200с.
3. Turbo Pascal 7.0 for users. BHV, 1999. – 448p.
4. Т.А. Павловськая Pascal Издательство «Питер», 2003.-291с.
5. П.П. Овчинников, Ф.П. Яремчук, В.М. Михайленко Вища математика Частина-1 : Київ «Техніка»2003 -597с.
6. Савуляк В.І. Навчальний посібник
7. Кишеніна Н.В., Кишені В.О., «основи інформаційний технологій та програмування « частина-1 Вінниця 2003.
Дата: 2019-05-29, просмотров: 300.