Рассмотрим выходной (вторичный) вал программного механизма. Представим вал в виде балки, закрепленной в опорах A и B (см. рис.3). К валу приложен крутящий моментМкр, приводимый с червячного колеса.
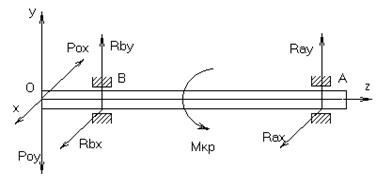
Рис. 3. Силовая схема выходного вала.
На схеме:
Рох, Роу – составляющие нормальной реакции кулачка по осям X и Y (см. п. 4.3).
Rаx, Rаy, Rаx, Rаy – составляющие реакции опор А и В.
Pox=  =1.46 H.
=1.46 H.
Poy=  =5.65 H.
=5.65 H.
Исходя из условия равновесия запишем системы уравнений
в плоскости хОу:
 (6.1)
(6.1)
в плоскости yOz:
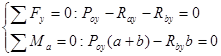 (6.2)
(6.2)
a – расстояние между кулачком и левой опорой. а=15 мм.
b – расстояние между опорами. b=85 мм.
Из систем уравнений определяем реакции опор
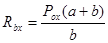 =1.46*(15+85).85=1.72 Н.
=1.46*(15+85).85=1.72 Н.
 =1.46-1.72=-0.26 Н.
=1.46-1.72=-0.26 Н.
 =5.65*(15+85).85=6.65 Н.
=5.65*(15+85).85=6.65 Н.
 =5.65-6.65=-1.00 Н.
=5.65-6.65=-1.00 Н.
Запишем выражения для полных реакций опор:
 =
=  =1.03 Н.
=1.03 Н.
 =
=  =6.86 Н.
=6.86 Н.
Выберем для выходного вала по ГОСТ 8338-75 [6] шариковые радиальные однорядные подшипники сверхлегкой серии диаметров 9 следующих типов:
- Для правой опоры – 1000098 со следующими парамтрами:
-- внутренний диаметр d=8 мм.
-- наружний диаметр D=19 мм.
-- ширина колец B=6 мм.
-- диаметр шариков Dw=3 мм.
-- статическая грузоподъемность C0=885 Н.
- Для левой опоры – 1000900 со следующими параметрами:
-- внутренний диаметр d=10 мм.
-- наружний диаметр D=22 мм.
-- ширина колец B=6 мм.
-- диаметр шариков Dw=3.969 мм.
-- статическая грузоподъемность C0=1350 Н.
Рассчитаем эквивалентную статическую нагрузку (т.к. скорость вращения кулачка довольно мала – 5800/22=264 сек/оборот) для обоих шарикоподшипников:
P0=X0Fr+Y0Fa(6.3)
Где X0 – коэффициент радиальной статической нагрузки.
Fr - наибольшая радиальная составляющая статической нагрузки.
Y0 - коэффициент осевой статической нагрузки.
Fa - наибольшая осевая составляющая статической нагрузки.
Так как характер нагружения выходного вала носит радиальный характер, осевая составляющая достаточно мала, чтобы оказывать существенное влияние (Помимо того, собственно ее определение достаточно трудоемко). Поэтому принимаем X0=1, Y0=0. Соответственно эквивалентная нагрузка для каждого шарикоподшипника:
1. P0=Fr1=1.03 Н << C0=885 Н.
2. P0=Fr1=6.86 Н << C0=1350 Н.
Как видно, статическая нагрузка не превышает статической грузоподъемности, из чего делаем вывод о том, что подшипники выбраны верно.
Заключение
В результате выполнения курсового проекта разработана конструкция программного механизма с шаговым электродвигателем. Проведен кинематический расчет механизма, рассчитаны параметры деталей храпового механизма, деталей зубчатых передач, кулачкового механизма и валов. Проведено обоснование выбора шарикоподшипников вторичного вала.
Список используемой литературы
1.ПервицкийЮ.Д. Расчет и конструирование точных механизмов. - Л.: «Машиностроение». 1976. ----- 456 с.
2.Вопилкин Е.А. Расчет и конструирование механизмов, приборов и систем. - М.: Высшая Школа. 1980. -523 с.
3.Левятов Д.С. Расчет и конструирование деталей машин. - М.: Высшая Школа. 1979.303 с.
4.Тищенко О.Ф. и др. Элементы приборных устройств. Курсовое проектирование. В 2х частях. Под ред. Тищенко О.Ф. - М.: Высшая Школа. 1978. Ч1 -327 с. и Ч2 -230 с.
5. Заплетохин В.А. Конструирование деталей механических устройств. - Л.: «Машиностроение».
1990. -672 с.
6. Подшипники качения: Справочник-каталог/ Под ред. В.Н. Нарышкина и Р.В. Коросташевского. – М.: Машиностроение, 1984. –280 с.
7. Электромагнитный привод робототехнических систем/ Афонин А.А. и др. – Киев: Наук. Думка, 1983. –272с.
8. Справочное руководство по черчению/ В.Н. Богданов и др. –М.: Машиностроение, 1989. –864 с.
9. ГОСТ 2.703-68 Правила выполнения кинематических схем.
Приложение
1.Программа расчета формы профиля кулачка.
Язык программирования: Паскаль (Borland Pascal 7.0)
program fist;
uses Crt;
var gm,smax,alpha,gamma,q,rmin,rminr,r,step,stepst,phi,phist:real;
i:integer;
begin
ClrScr;
write ('Введите ход толкателя Smax:'); readln(smax);
write ('Введите угол давления alpha:'); readln(alpha);
write ('Введите минимальный радиус Rmin:'); read(rmin);
rminr:=q*cos(alpha/180*pi)/sin(alpha/180*pi);
if rmin<rminr then writeln (' Rmin слишком мал.')
else writeln (' Rmin выбран верно.');
write ('Введите рабочий угол gamma:'); readln(gamma);
gm:=gamma/180*pi;
q:=smax/(gm);
write ('Введите шаг step:'); readln(step);
r:=rmin;
ClrScr;
writeln(' Угол',' ':14,'Радиус R');
stepst:=step/180*pi;
phi:=0; phist:=0;i:=0;
repeat
writeln (phi:9:1,' ':9,r:9:1);
phi:=phi+step; phist:=phist+stepst;
r:=rmin+q*phist;
i:=i+1; if i=20 then begin readln; ClrScr; i:=0; end;
until phi>gamma;
q:=smax/(2*pi-gm-stepst);
phist:=0;
repeat
phi:=phi+step; phist:=phist+stepst;
r:=rmin+smax-q*phist;
writeln (phi:9:1,' ':9,r:9:1);
i:=i+1; if i=20 then begin readln; ClrScr; i:=0; end;
until phi>359;
readln
end.
Результат работы программы:
Угол Радиус R
--------------------------
0.0 20.0
10.0 20.3
20.0 20.5
30.0 20.8
40.0 21.0
50.0 21.3
60.0 21.6
70.0 21.8
80.0 22.1
90.0 22.3
100.0 22.6
110.0 22.8
120.0 23.1
130.0 23.4
140.0 23.6
150.0 23.9
160.0 24.1
170.0 24.4
180.0 24.7
190.0 24.9
200.0 25.2
210.0 25.4
220.0 25.7
230.0 26.0
240.0 26.2
250.0 26.5
260.0 26.7
270.0 27.0
290.0 26.1
300.0 25.3
310.0 24.4
320.0 23.5
330.0 22.6
340.0 21.8
350.0 20.8
360.0 20.0
Дата: 2019-05-29, просмотров: 369.