Введение
Крановое электрооборудование является одним из основных средств комплексной механизации всех отраслей народного хозяйства. Подавляющее большинство грузоподъемных машин изготовляемых отечественной промышленностью, имеет привод основных рабочих механизмов, и поэтому действия этих машин в значительной степени зависит от качественных показателей используемого кранового оборудования.
Перемещение грузов, связанное с грузоподъемными операциями, во всех отраслях народного хозяйства, на транспорте и в строительстве осуществляется разнообразными грузоподъемными машинами.
Особые условия использования электропривода в грузоподъёмных машинах явились основой для создания специальных серий электрических двигателей и аппаратов кранового исполнения. В настоящее время крановое электрооборудование имеет в своём составе серии крановых электродвигателей переменного и постоянного тока, серии силовых и магнитных контроллеров, командоконтроллеров, кнопочных постов, конечных выключателей, тормозных электромагнитов и электрогидравлических толкателей, пускотормозных резисторов и ряд других аппаратов, комплектующих разные крановые электроприводы.
В крановом электроприводе начали довольно широко применять различные системы тиристорного регулирования и дистанционного управления по радио каналу или одному проводу.
Развитие машиностроения, занимающиеся производством грузоподъемных машин, является важным направлением развития народного хозяйства страны. Одной из главных особенностей "Азовмаша" является способность быстро реагировать на изменения маркетинговой ситуации и также быстро трансформировать производство на выпуск
новой продукции, удовлетворяющей индивидуальным требованиям своих постоянных и новых заказчиков.
Это позволило предприятию в кратчайшие сроки освоить производство железнодорожных цистерн нового поколения, современных крытых вагонов и вагонов-хопперов, большегрузных контейнеров-цистерн, автоцистерн для сжиженных газов, газозаправочных комплексов, мощных мостовых перегружателей и портальных кранов, оборудования для атомных электростанций, рам и колонн для ветроэнергетических установок, корпусов бронетехники и многих других видов изделий.
Около 500 единиц кузнечно-прессового оборудования позволяет производить холодно и горячештампованные заготовки и детали в широкой номенклатуре.
Предприятие производит товары бытового назначения - отопительную и проточную водонагревательную технику, газовые и электроплиты, котлы на газе и твердом топливе, изделия из пластмасс, трубы и соединительные элементы трубопроводов.
Общая часть
Специальная часть
Расчёт мощности, выбор двигателя по каталогу и его проверка
На нагрев
Целью расчета является выбор приводного электродвигателя по справочнику и проверка его по перегрузочной способности и по условиям осуществимости пуска механизма подъёма мостового крана.
Исходными данными являются технические характеристики мостового крана из таблицы 1.1 пункта 1.2
Рассчитаем максимальную статическую мощность электродвигателя, не для подъёма номинального груза по следующей формуле:
 Рс =
Рс =  (2.1)
(2.1)
где mт - масса поднимаемого груза, т;
mо - масса грузозахватного устройства, т;
Vп - скорость подъёма, м/с;
ήн - коэффициент полезного действия механизма;
 (2.1)
(2.1)
Рассчитываем предварительную мощность электродвигателя и выбор его по каталогу.
Предварительная мощность электродвигателя:
P´пред. = К∙Рс (2.2)
где К – коэффициент, учитывающий цикличность работы механизма = 0,8
P´пред. = 0,8∙34,54 = 27,632 кВт (2.2)
Ориентировочная продолжительность включения:
 (2.3)
(2.3)
где Кi - количество операций в течении одного цикла Кi = 4;
tp - время одной операции (подъёма или спуска), с;
tц - время цикла, с;
 (2.4)
(2.4)
где H - высота подъёма, м;
 (2.5)
(2.5)
где Nc - число циклов в час;
tц =  = 400 (2.5)
= 400 (2.5)
tp =  = 55,5 (2.4)
= 55,5 (2.4)
 (2.3)
(2.3)
Находим окончательно предварительную мощность электродвигателя при каталожной продолжительности включения. Электродвигателя, предназначенного для работы в повторно-кратковременном режиме, выпускают с ПВкат. = 15;25;40;60;
Рпред. = Р´пред.∙  = 27,632∙
= 27,632∙  = 26,45 кВт (2.6)
= 26,45 кВт (2.6)
Частотой вращения ηн об/мин электродвигателя задаёмся по каталогу. По значениям Рпред. и ηн по каталогу выбираем двигатель типа MTF, MTH или HMT соблюдая условие, что номинальная мощность должна быть равна или несколько больше (до 20%) предварительной Рпред., т.е. РH ≥ Рпред.
Согласно условию изложенного выше выбираем электродвигатель по каталогу типа МТН512-8 ,паспортные данные которого занесены в таблицу 2.1
Таблица 2.1 - Технические данные асинхронного электродвигателя с
фазным ротором типа МТН512-8
| Тип электродвигателя | Рн кВт | ηн об/ мин | ωн рад/с | Ic A | Uc В | Iрн А | Uрн В | 
| Mmax Hm | Jдв кг∙м2 | ПВ % | Степень защиты |
| МТН 512-8 | 31 | 715 | 74,8 | 79 | 380 | 63 | 304 | 9,56 | 1370 | 1,42 | 60 |
Рассчитываем номинальный момент двигателя.
 (2.7)
(2.7)
где Рн - мощность выбранного двигателя по каталогу, кВт;
ωн – угловая скорость вращения выбранного двигателя, рад/с;
Имея значение частоты вращения ηн об/мин считаем угловую скорость по формуле:
 (2.8)
(2.8)
 (2.8)
(2.8)
 (2.7)
(2.7)
Рассчитываем нагрузочную диаграмму привода.
Нагрузочная диаграмма электродвигателя строится на основании уравнения движения электропривода М = Мс + Мдин.
Как видно из приведённого уравнения, для построения нагрузочной диаграммы электродвигателя М = ƒ(t) необходимо иметь график изменения во времени приведённых статических моментов Мс = ƒ(t) , т.е. нагрузочную диаграмму механизма подъёма мостового крана и график изменения во времени динамического момента  , для определения которого необходимо знать график изменения угловой скорости электродвигателя ω = ƒ(t) и приведённый момент инерции J.
, для определения которого необходимо знать график изменения угловой скорости электродвигателя ω = ƒ(t) и приведённый момент инерции J.
Алгебраическая сумма статических и динамических моментов дает график изменения суммарного момента на валу электродвигателя, т.е. нагрузочную диаграмму электродвигателя.
Статические моменты, приведённые к валу электродвигателя при подъёме номинального груза:
 (2.9)
(2.9)
где mг - масса груза, т;
mo - масса грузозахватного устройства, т;
Dб - диаметр барабана, м;
ηн - коэффициент полезного действия механизма;
i - передаточное отношение редуктора и полиспаста.
 (2.10)
(2.10)
 (2.10)
(2.10)
где ωн – угловая скорость вращения электродвигателя, рад/с;
Vп – скорость подъёма, м/с;
 (2.9)
(2.9)
Статические моменты, приведённые к валу электродвигателя при тормозном спуске номинального груза:
 (2.11)
(2.11)
 (2.11)
(2.11)
Статические моменты, приведённые к валу электродвигателя при подъёме пустого грузозахватного устройства:
 (2.12)
(2.12)
где ηо – коэффициент полезного действия механизма при данной нагрузке. Определяется по кривым ηо = ƒ(К3) , ηо = 0,1
Коэффициент нагрузки определяется по формуле:
 (2.13)
(2.13)
 (2.13)
(2.13)
 (2.14)
(2.14)
Статические моменты, приведённые к валу электродвигателя при спуске пустого грузозахватного устройства:
 (2.15)
(2.15)
 (2.15)
(2.15)
Значение Мсо может быть как положительным , так и отрицательным. Для приводов, у которых момент инерции не зависит от угла поворота, приведённой к валу электродвигателя динамический момент находится из уравнения:
 (2.16)
(2.16)
где  - ускорение или замедление ротора электродвигателя, рад/с2;
- ускорение или замедление ротора электродвигателя, рад/с2;
Jэ - приведённый к валу электродвигателя эквивалентный момент инерции системы при работе с грузом и без груза, т.е. Jэг и Jэо
Определяем приведённый к валу электродвигателя эквивалентный момент инерции системы при работе с грузом:
 (2.17)
(2.17)
где К = 1,15 - коэффициент, учитывающий приближенно момент инерции редуктора и барабана;
Jдв - момент инерции электродвигателя (по каталогу), кгм2;
Jш - момент инерции тормозного шкива, кгм2;
Jм - момент инерции муфты и быстроходного вала редуктора, кгм2;
В ряде случаев Jш и Jм определяют приближенно в долях от момента инерции ротора электродвигателя:
Jш = 0,3∙Jдв , (2.18)
Jш = 0,3∙1,42 = 0,42 кгм2 (2.18)
Jм = 0,15∙Jдв , (2.19)
Jм= 0,15∙1,42 = 0,21 кгм2 (2.19)
Jп.д.г. – момент инерции поступательно-движущихся элементов инерции, приведенный к валу электродвигателя
 (2.20)
(2.20)
 (2.20)
(2.20)
где Vп – скорость подъёма, м/с;
ωн – угловая скорость вращения электродвигателя, рад/с;
 (2.17)
(2.17)
Определяем приведённый к валу электродвигателя эквивалентный момент инерции системы при работе без груза:
 (2.21)
(2.21)
где Jп.д.о. – момент инерции поступательно-движущихся элементов системы без учёта веса груза, приведённый к валу электродвигателя;
 (2.22)
(2.22)
 (2.22)
(2.22)
 (2.23)
(2.23)
Определяем допустимое ускорение электродвигателя:
 (2.24)
(2.24)
где адоп – максимально допустимое линейное ускорение груза, м/с2;
Обычно адоп = аср. = (0,1÷0,3) м/с2 ,следовательно берём адоп = 0,2 м/с2;
 (2.24)
(2.24)
Динамический момент системы при подъёме груза:
 (2.25)
(2.25)
 (2.25)
(2.25)
Расчёт среднего пускового момента двигателя.
Зная величину статических и динамических моментов, можно определить средний пусковой момент, развиваемый электродвигателем при подъёме груза по формуле:
Мср.п. = Мпг + Мдин , (2.26)
Мср.п. =464 + 202,4 = 666,4 Нм (2.26)
Обычно Мср.п недолжно превышать (1,7÷2)∙Nн
Определение времени разгона при подъёме груза:
 (2.27)
(2.27)
где ωкон и ωнач - соответственно конечное и начальное значение угловой скорости, ωкон = ωн , ωнач = 0, рад/с;
Среднее время пуска для механизма подъёма обычно находится от 1 до 5 с;
 (2.27)
(2.27)
Определение времени разгона при тормозном спуске.
Двигатель работает в режиме электронного тормоза (тормозной спуск) и груз ускоряется под действием собственного веса, т.е. разгон системы происходит под действием момента, равного Мсг и определяется по формуле:
 (2.28)
(2.28)
 (2.28)
(2.28)
Определение времени разгона при подъёме грузозахватного устройства:
 (2.29)
(2.29)
где М´срп = (1,15÷ 1,25)∙Мн
Мн – средний пусковой момент при подъёме и опускании
грузозахватного устройства.
М´срп = 1,2∙414,4 = 497,28 Нм (2.30)
 (2.31)
(2.31)
Определение времени разгона при спуске грузозахватного устройства:
 (2.32)
(2.32)
 (2.32)
(2.32)
Определение времени торможения.
Схемы управления электродвигателями механизмов подъёма предусматривают экстренное наложение механических тормозов при отключении статора электродвигателя от сети, т.е. при установке силового или командоконтроллера в нулевое положение.
В связи с этим для механизмов подъёма электрическое торможение электродвигателя можно не учитывать.
Время торможения для различных режимов определяется с учётом момента, развиваемого только механическим тормозом.
Момент тормоза Мт определяется максимальным статическим моментом Мс.макс, приведенным к тормозному валу (обычно это вал электродвигателя) и коэффициент запаса Кт
Мт = Кт∙Кс.макс. (2.33)
где Мс.макс. – максимальный статический момент на тормозном валу
Мс.макс = Мсг Нм;
Кт - коэффициент запаса.
По правилам Госгортехнадзора коэффициент имеет следующие значения:
- для легкого режима работы = 1,5;
- для среднего режима работы = 1,75;
- для тяжелого режима работы = 2;
- для весьма тяжелого режима работы =2,5;
При этом механизмы подъёма кранов, транспортирующих жидкий металл, ядовитые и взрывчатые вещества, должны иметь два тормоза. Коэффициент запаса каждого из них должен быть не менее 1,25.
Мт = 1,75∙297,8 =521,15 Нм (2.34)
По рассчитанному значению Мт выбираем тормоз с номинальным тормозным моментом равным или несколько больше, чем Мт, т.е. Мнт ≥ Мт.
Время торможения при подъёме груза:
 (2.35
(2.35
 (2.35)
(2.35)
Время торможения при спуске груза:
 (2.36)
(2.36)
 (2.36)
(2.36)
Время торможения при подъёме грузозахватного устройства:
 (2.37)
(2.37)
 (2.37)
(2.37)
Время торможения при спуске грузозахватного устройства:
 (2.38)
(2.38)
 (2.38)
(2.38)
где ωнач – скорость, с которой начинается режим торможения;
ωкон – скорость, при которой заканчивается режим торможения.
Пути, пройденные грузом или грузозахватным устройством во время пусков и торможений:
- при подъёме груза:
 (2.39)
(2.39)
 (2.39)
(2.39)
 (2.40)
(2.40)
 (2.40)
(2.40)
где Vп - скорость подъёма груза, м/с;
tр.пг - время разгона при подъёме груза, с;
t.т.пг - время торможения при подъёме груза, с;
- при спуске груза:
 (2.41)
(2.41)
 (2.41)
(2.41)
 (2.42)
(2.42)
 (2.42)
(2.42)
- при подъёме грузозахватного устройства:
 (2.43)
(2.43)
 (2.43)
(2.43)
 (2.44)
(2.44)
 (2.44)
(2.44)
- при спуске грузозахватного устройства:
 (2.45)
(2.45)
 (2.45)
(2.45)
 (2.46)
(2.46)
 (2.46)
(2.46)
Пути, пройденные грузом или грузозахватным устройством с установившейся скоростью:
- при подъёме груза
Sу.пг = H – Sр.пг. – Sт.пг. , (2.47)
Sу.пг =10 - 0,081 - 0,019 = 9,9 м (2.47)
- при спуске груза
Sу.сг = H – Sр.сг. – Sт.сг. , (2.48)
Sу.сг =10 - 0,054 - 0,072 = 9,87 4м (2.48)
- при подъёме грузозахватного устройства
Sу.по = H – Sр.по. – Sт.по. , (2.49)
Sу.по =10 - 0,0234 - 0,030 = 9,946 м (2.49)
- при спуске грузозахватного устройства
Sу.со = H – Sр.со. – Sт.со. , (2.50)
Sу.со =10 – 0,0324 -0,029 = 9,938 м (2.50)
Время работы с установившейся скоростью и время паузы:
- при подъёме груза
 (2.51)
(2.51)
 (2.51)
(2.51)
- при спуске груза
 (2.52)
(2.52)
 (2.52)
(2.52)
- при подъёме грузозахватного устройства
 (2.53)
(2.53)
 (2.53)
(2.53)
- при спуске грузозахватного устройства
 (2.54)
(2.54)
 (2.54)
(2.54)
Время паузы:
 (2.55)
(2.55)
где tп – время цикла, с;
 - суммарное время работы, с;
- суммарное время работы, с;
 = tр.пг+ tу.пг+ tт.пг+ tр.сг+ tу.сг+ tт.сг+ tр.по+ tу.по+ tт.по+ tр.со+ tу.со+ tт.со (2.56)
= tр.пг+ tу.пг+ tт.пг+ tр.сг+ tу.сг+ tт.сг+ tр.по+ tу.по+ tт.по+ tр.со+ tу.со+ tт.со (2.56)
 = 0,9+ 55+ 0,22+ 0,61+ 54,8+ 0,81+ 0,26+ 55,25+ 0,34+ 0,36+ 55,21+ 0,33=224,09 с (2.56)
= 0,9+ 55+ 0,22+ 0,61+ 54,8+ 0,81+ 0,26+ 55,25+ 0,34+ 0,36+ 55,21+ 0,33=224,09 с (2.56)
 (2.55)
(2.55)
Строим скоростную и нагрузочную диаграмму электропривода (рисунок 1)
Проверяем предварительно выбранного двигателя по условию нагрева и перегрузочной способности.
Фактическая продолжительность включения
 (2.57)
(2.57)

Расчётный эквивалентный момент:

 (2.58)
(2.58)


 (2.58)
(2.58)
Эквивалентный момент, соответствующий продолжительности включения выбранного электродвигателя.
 (2.59)
(2.59)
Если эквивалентный момент равен или несколько меньше номинального, то выбранный электродвигатель проходит по нагреву, т.е.
Мэ ≤ Мн (2.60)
280,1 ≤ 414,4 (2.60)
Как видно из уравнения выбранный электродвигатель проходит по нагреву.
Проверку на перегрузочную способность производим по условию:
1,3∙Ммакс.нагр ≤ (0,8÷0,85)∙Ммакс.дв (2.61)
где Ммакс.нагр – максимальный момент из нагрузочной диаграммы;
Ммакс.дв – максимальный момент электродвигателя;
В данном случае:
1,3∙666,4 ≤ 0,825∙1370 (2.61)
866,32 ≤ 1130,25 (2.61)
Как видно из условия выбранный электродвигатель проходит по перегрузочной способности.
Её работы
Схема с магнитным контроллером и динамическим торможением, контроллер типа ТСД.
При подъёме груза регулирование скорости электродвигателя производится изменением сопротивления резисторов в цепи обмотки ротора с помощью контакторов ускорения К6 – К9. При спуске груза регулирование производится с помощью тех же резисторов но в режиме динамического торможения. При подъёме и спуске предусматривается автоматический разгон под контролем реле времени (ускорения) КТ2, КТ3 и КТ4. Контроль разгона при подъёме осуществляется реле КТ2 и КТ3, начиная с 3 положения. Реле КТ4 при этом не работает так как в цепь его катушки включены замыкающие контакты К2.
Режим динамического торможения осуществляется на всех положениях спуска, кроме последнего, на котором электродвигатель питается от сети с невыключеными ступенями резисторов роторной цепи. На первом положении спуска все ступени резисторов, кроме невыключаемого, выведены из цепи ротора включенными контакторами ускорения К7, К8, К9.
На положениях спуска 2 и 3 для увеличения скорости в цепь ротора вводятся ступени резисторов (отключаются контакторы К8 и К9 – на втором положении и К7 – на третьем положении). При переходе с третьего на четвёртое положение спуска включается контактор К6 и под контролем реле ускорения КТ2 – КТ4 – контакторы К7 – К9.
Реверс в схеме выполняется контакторами К1 и К2,динамическое торможение – контактором К3, электрически сблокированым с контакторами К1, К2, К5 и механически с К5. Подпитка электродвигателя в режиме динамического торможения при положениях спуска груза осуществляется от сети через контактор К3 (включенного параллельно К5), две фазы электродвигателя, контакт контактора К3 (цепи включения выпрямителя UZ), катушка реле контроля KV1, диод VD12, резистор R1.
В схеме предусмотрено и торможение с помощью механического тормоза с тормозным электромагнитом YB.
Для повышения надёжности в цепи катушки YB предусмотрен двойной разрыв, осуществляемый контактами контактора К4 и реле KV2. На панели управления предусмотрена защита: нулевая (минимального напряжения) – реле KV2, максимального тока – реле KA, конечная – выключатели SQ1 и SQ2, от пробоя вентилей – реле KV3.
Технике
Электрооборудования
Повышенная опасность работ при транспортировке поднятых грузов требует при проектировании и эксплуатации соблюдение обязательных правил по устройству и эксплуатации подъемно-транспортных машин. На механизмах подъема и передвижения правилами по устройству и эксплуатации предусмотрена установка ограничителей хода, которые воздействуют на электрическую схему управления. Конечные выключатели механизма подъема ограничивают ход грузозахватывающего приспособления вверх, а выключатели механизмов передвижения моста и тележки ограничивают ход механизмов в обе стороны. Предусматривается также установка конечных выключателей, предотвращающих наезд механизмов в случае работы двух и более кранов на одном мосту. Исключение составляют установки со скоростью движения до 30 м/мин. Крановые механизмы должны быть снабжены тормозами закрытого типа. Действующими при снятии напряжения.
На крановых установках допускается применять рабочее напряжение до500 В, поэтому крановые механизмы снабжают электрооборудованием на напряжения 220, 380, 500 В переменного тока и 220, 440 В постоянного тока. В схеме управления предусматривают максимальную защиту, отключающую двигатель при перегрузке и коротком замыкании. Нулевая защита исключает самозапуск двигателей при подаче напряжения после перерыва в электроснабжении. Для безопасного обслуживания электрооборудования, находящегося на ферме моста, устанавливают, блокировочные контакты на люке и двери кабины. При открывании люка или двери напряжение с электрооборудования снимается.
При работе крана происходит постоянное чередование направления движения крана, тележки и крюка. Так, работой механизма подъема состоит из процессов подъема и опускания груза и процессов передвижения пустого крюка. Для увеличения производительности крана используют совмещение операций: Время пауз, в течение которого двигатель не включен и механизм не работает, используется для навешивания груза на крюк и освобождение крюка, для подготовки к следующему процессу работы механизма. Каждый процесс движения может быть разделен на периоды неустановившегося движения (разгон, замедление) и период движения с установившейся скоростью.
Мостовой кран установлен в кузнечнопрессовом цеху машиностроительного производства, где наблюдается выделение пыли, поэтому электродвигатель и все электрооборудование мостового крана требует защиты общепромышленного исполнения не ниже IP 53 - защита электрооборудования от попадания пыли, а также полная защита обслуживающего персонала от соприкосновения с токоведущими и вращающимися частями, а также защита электрооборудования от капель воды падающих под углом 600 к вертикали.
Кабина управления краном выполняется теплоизолированной, в ней также оборудуется установка для кондиционирования воздуха.
В настоящее время существуют два основных направления минимизации риска возникновения и последствий ЧС на промышленных объектах. Первое направление заключается в разработке технических и организационных мероприятий, снижающих вероятность реализации опасного поражающего потенциала современных технических систем. В рамках этого направления технические системы и объекты снабжаются различными защитными устройствами — средствами взрыво- и пожарозащиты технологического оборудования, электро- и молниезащиты, локализации и тушения пожаров и т.д.
При эксплуатации установок повышенной опасности предусматривается целый ряд специальных организационных мероприятий, направленных на обеспечение безопасности работ.
Так, эксплуатацию электроустановок (электродвигателей, трансформаторов, аккумуляторов и т.п.) должен осуществлять электротехнический персонал, который делится на:
- административно-технический;
- оперативный;
- ремонтный;
- оперативно-ремонтный.
Оперативный персонал осуществляет осмотр электрооборудования, подготовку рабочего места, техническое обслуживание, включая оперативные переключения, допуск к работам и надзор за работающими. Ремонтный персонал выполняет все виды работ по его ремонту, реконструкции и монтажу. Оперативно-ремонтный совмещает функции оперативного и ремонтного персонала.
При ремонте и обслуживании крана к работам в электроустановках допускаются лица:
- достигшие 18-летнего возраста;
- прошедшие профмедосмотр и не имеющие медицинских противопоказаний;
- теоретически и практически обученные по специальной программе (в том числе по теме: «Освобождение пострадавшего от электротока, оказание ему первой доврачебной помощи»);
- после аттестации квалификационной комиссией. В последующем медицинское освидетельствование повторяется один раз в 2 года. Переаттестация рабочих - ежегодно, а инженерно-технических работников - каждые 3 года. Квалификационная группа персонала подтверждается удостоверением (кроме группы I). Всего квалификационных групп пять. Наиболее ответственная из них - Ч группа. К обслуживанию электроустановок допускаются только лица, имеющие квалификацию не ниже II группы. Лица, обслуживающие технологическое оборудование с электроприводом, должны иметь знания в объеме I или II группы.
Для обеспечения безопасности труда при работе машин с движущимися частями необходим комплекс организационных мероприятий:
- инструктаж и обучение технике безопасности машинистов и рабочих, обслуживающих машины;
- разработка инструкций по технике безопасности при эксплуатации, монтаже, демонтаже и техническом обслуживании этих машин;
- разработка ППР и типовых технологических карт на каждый вид работы с исследующей привязкой их к местным условиям.
Одной из важных задач, стоящих в связи с этим перед конструкторскими организациями и заводами-изготовителями, является дальнейшее совершенствование существующих и разработка новых видов строительных машин и оборудования, обеспечивающих наибольшую безопасность в работе.
Для обеспечения безопасности работ в действующих электроустановках должны выполняться следующие организационные мероприятия:
- назначение лиц, ответственных за организацию и безопасность производства работ;
- оформление наряда или распоряжения на производство работ;
- осуществление допуска к проведению работ;
- организация надзора за проведением работ;
- оформление окончания работы, перерывов в работе, переводов на другие рабочие места;
- установление рациональных режимов труда и отдых;
- проверка отсутствия напряжения;
- отключение установки (части установки) от источника питания;
При проведении работ со снятием напряжения в действующих электроустановках или вблизи них:
- отключение установки (части установки) от источника питания электроэнергией;
- механическое запирание приводов отключенных коммутационных аппаратов, снятие предохранителей, отсоединение концов питающих линий и другие мероприятия, обеспечивающие невозможность ошибочной подачи напряжения к месту работы;
- установка знаков безопасности и ограждение остающихся под напряжением токоведущих частей, к которым в процессе работы можно прикоснуться или приблизиться на недопустимое расстояние;
- наложение заземлений (включение заземляющих ножей или наложение переносных заземлений;
- ограждение рабочего места и установка предписывающих знаков безопасности.
Чтобы предупредить возможность случайного проникновения и тем более прикосновения к токоведущим частям, находящимся под напряжением, используются защитные сетчатые и смешанные ограждения, а также система предупредительных плакатов.
Временными ограждениями могут быть специальные сплошные или решетчатые деревянные ширмы, щиты, изделия из миканита, резины и других изоляционных материалов в сухом состоянии, хорошо укрепленные или прочно установленные. Применяются следующие предупредительные плакаты для электроустановок:
- предостерегающие, в том числе «Высокое напряжение— опасно для жизни!», «Под напряжением. Опасно для жизни!», «Стой! Высокое напряжение», «Не влезай, убьет!», «Стой! Опасно для жизни»;
- запрещающие: «Не включать — работают люди», «Не открывать — работают люди», «Не включать — работа на линии»;
- разрешающие: «Работать здесь», «Влезать здесь»;
- напоминающие: «Заземлено».
Каждый плакат имеет свою форму, соответствующее изображение. Их рисунки, размер и исполнение, место и условия применения определены Правилами.
При выполнении конкретных работ или работ с повышенной опасностью выписывается наряд-допуск:
- записи в наряде должны быть разборчивыми. Заполнение наряда карандашом и исправление текста запрещаются.
- система нумерации нарядов устанавливается руководством организации.
- при указании дат пишут число, месяц и две последние цифры, обозначающие год, например: 29.09.00, 19.12.01, 30.01.02.
- кроме фамилий работников, указываемых в наряде, записываются их инициалы и группа по электробезопасности.
- в наряде указываются диспетчерские наименования (обозначения) электроустановок, присоединений, оборудования.
- в случае недостатка строк в таблицах основного бланка наряда разрешается прикладывать к нему дополнительный бланк под тем же номером с указанием фамилии и инициалов выдающего наряд для продолжения записей. При этом в последних строках соответствующей таблицы основного бланка следует записать: «См. дополнительный бланк».
Расчет защитного заземления
Производим расчёт защитного заземления питающей подстанции 10/0,4 кВ кузнечнопрессового цеха.
Исходные данные:
Стальной пруток d = 20 мм, l = 3 м; заземлитель горизонтальный – плоса 40x4 мм; глубина заложения горизонтального заземлителя – 0,7 м; климатическая зона – III; грунт – суглинок.
По таблице 63 [1] определяем удельное сопротивление грунта ρ = 100 Ом*м
Нормируемое сопротивление заземляющего устройства Rзн = 4 Ом [1, таблица 62]
Согласно ПУЭ допустимое сопротивление ЗУ с учётом удельного сопротивления грунта:
 (5.1)
(5.1)
где ρгр – удельное сопротивление грунта, Ом*м;
Rзн – сопротивление заземляющего устройства, Ом;
 (5.1)
(5.1)
Обычно отношение расстояния между вертикальными стержнями а к их длине l принимают равными: а/l = 1; 2; 3. Принимаем а = 2 ∙l = 2∙3 = 6 м.
Определяем расстояние от середины стержня до поверхности грунта [1,стр. 150]:
t` = t0 + 0,5∙l (5.2)
где t0 - глубина заложения горизонтального заземлителя, м;
l – длина прутика, м;
t` = 0,7 + 0,5∙3 = 1,05 м (5.2)
Значение коэффициента сезонности для вертикальных заземлителей для III климатической зоны кс =1,5 [1,таблица 64]
Определяем расчётное удельное сопротивление грунта для стержневых заземлителей:
ρрасч.в = кс∙ ρгр , (5.3)
ρрасч.в = 1,5∙100 =150 Ом∙м (5.3)
Определяем сопротивление растеканию вертикальных заземлителей [1,стр145]:
 (5.4)
(5.4)
где d – диаметр заземлителя, м;
ρрасч.в – расчётное удельное сопротивление грунта для стержневых заземлителей
l – длина прутка, м.
t` – расстояние от середины стержня до поверхности грунта, м;
 (5.4)
(5.4)
Определяем количество вертикальных заземлителей [1,стр. 145]:
 (5.5)
(5.5)
где ηв – коэффициент использования вертикальных заземлителей, зависящий от количества заземлителей и расстояния между ними [1, таблица 65, 66]
Количество вертикальных заземлителей для определения ηв можно принять равными Rв/ Rз = 45,2/4 = 11,3; ηв = 0,75
 (5.5)
(5.5)
Применяем к установке 15 шт.
Определяем длину горизонтального заземлителя (полосы):
lг = 1,05∙nв∙a = 1,05∙15∙6 = 94,5 м (5.6)
Значение коэффициента сезонности для горизонтальных заземлителей для III климатической зоны кс = 2 [1,таблица 64]
Определяем расчетное удельное сопротивление для горизонтальных заземлителей:
ρрасч.г = кс∙ ρгр = 2∙100 = 200 Ом∙м (5.7)
Определяем сопротивление растеканию горизонтальных заземлителей [1, стр 145]:
 (5.8)
(5.8)
где lг – длина горизонтального заземлителя, м;
ρрасч.г – расчетное удельное сопротивление горизонтальных заземлителей, Ом∙м;
t` – расстояние от середины стержня до поверхности грунта, м;
 (5.8)
(5.8)
Определяем действительное сопротивление растеканию горизонтального заземлителя с учётом коэффициента использования:
 (5.9)
(5.9)
где ηг – коэффициент использования горизонтального электрода при размещении вертикальных электродов по контуру ηг = 0,4 [1, таблица 68]
 (5.9)
(5.9)
Определяем сопротивление растеканию вертикальных заземлителей с учётом сопротивления горизонтального заземлителя:
 (5.10)
(5.10)
Определяем уточнённое количество вертикальных заземлителей:
 (5.11)
(5.11)
где ηв – коэффициент использования вертикальных заземлителей, зависящий от количества заземлителей и расстояния между ними [1, таблица 65, 66]
 (5.11)
(5.11)
Применяем к установке 10 шт.
Определяем сопротивление растеканию тока всего устройства защитного заземления:
 (5.12)
(5.12)
где R`г – действительное сопротивление растеканию горизонтальных заземлителей с учётом коэффициента использования, Ом;
R`в – сопротивление растеканию вертикальных заземлителей с учётом сопротивления горизонтального заземлителя, Ом;
nву – количество вертикальных заземлителей.
 (5.12)
(5.12)
Вывод: так как Rт ≤ Rзн, следовательно, расчет выполнен верно.
Чертим схему расположения заземлителей в земле (рисунок 1).
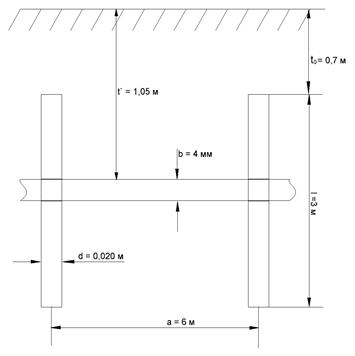
Рисунок 1 – Схема расположения заземлителей в земле в условиях кузнечнопрессового цеха завода «ОАО Азовмаш»
Автоматизации
Ряд газов, выделяющихся на начальной стадии горения (тления), определяются составом именно тех материалов, которые участвуют в этом процессе. Однако в большинстве случаев можно уверенно выделить и основные характерные газовые компоненты. Подобные исследования проводились в Институте пожарной безопасности (г. Балашиха Московской обл.) с использованием стандартной камеры объемом 60 м3 для имитации пожара. Состав выделяющихся при горении газов определялся при помощи хроматографии.
Эксперименты показали, что порог обнаружения системы раннего предупреждения пожара в атмосферном воздухе при нормальных условиях должен находиться для большинства газов, в том числе водорода и оксида углерода, на уровне 0,002%. Желательно, чтобы быстродействие системы было не хуже 10 с. Такой вывод можно рассматривать как основополагающий для разработок целого ряда предупреждающих пожарных газовых сигнализаторов.
Существующие средства газоанализа экологической направленности (в том числе на электрохимических, термокаталитических и других сенсорах) слишком дороги для такого использования. Внедрение в производство пожарных извещателей на основе полупроводниковых химических сенсоров, изготавливаемых по групповой технологии, позволит резко снизить стоимость газовых сенсоров.
На примере рассмотрим индикатор оксида углерода и водорода СО-12.
Отмеченный на международных выставках способ раннего обнаружения пожара обеспечивает одновременный контроль относительных концентраций в воздухе двух или более газов, таких как ароматические углеводороды, водород, оксид и диоксид углерода. Полученные значения сравниваются с заданными, и в случае их совпадения формируется сигнал тревоги. Контроль и сравнение относительных концентраций газовых компонент проводятся с заданной периодичностью. Возможность ложных срабатываний измерительного устройства при повышении концентрации одного из газов исключена, если нет возгорания. В качестве измерительного устройства предложен индикатор СО-12, предназначенный для обнаружения в воздушной атмосфере газообразного оксида углерода и водорода в диапазоне их концентраций от 0,001 до 0,01%. Прибор представляет собой девятиуровневый пропорциональный индикатор в виде линейки светодиодов трех цветов - зеленого (диапазон малых концентраций), желтого (средний уровень) и красного (высокий уровень). Каждому диапазону соответствуют три светодиода. При загорании красных светодиодов включается звуковой сигнал, предостерегающий людей об опасности отравления. Принцип работы индикатора основан на регистрации изменения сопротивления (R) полупроводникового газочувствительного сенсора, температура которого стабилизируется на уровне 120 °С в процессе измерений. При этом нагревательный элемент включен в обратную связь операционного усилителя и терморегулятора и периодически, каждые 6 с, отжигается в течение 0,5 с при температуре 450°С. Далее следует изотермическая релаксация сопротивления R при взаимодействии с угарным газом. Процессом измерения и выводом на индикатор данных управляет программируемое устройство. Принципиальная электрическая схема устройства показана на рисунке 1.
Индикатор можно эффективно использовать в качестве пожарного сигнального устройства как в жилых помещениях, так и на промышленных объектах. Дачные домики, коттеджи, бани, сауны, гаражи и котельные, предприятия с производством, основанном на использовании открытого огня и термообработки, предприятия горнодобывающей, металлургической и нефтегазоперерабатывающей промышленности и, наконец, автомобильный транспорт - вот далеко не полный список объектов, где индикатор СО-12 может быть полезен.
Подобные пожарные извещатели раннего обнаружения, объединенные в единую сеть и контролирующие газовыделение при тлении материалов перед их возгоранием, при размещении на промышленных объектах позволяют предупредить аварийные ситуации не только на наземных объектах пожарной охраны, но и в подземных сооружениях, угольных разрезах, где в результате перегрева оборудования, транспортирующего уголь, может произойти возгорание угольной пыли. Каждый датчик, имеющий световой и звуковой сигналы оповещения, способен не только информировать о степени загазованности территории, но и предупредить об опасности персонал, находящийся в непосредственной близости к экстремальному месту. Стационарные пожарные датчики, установленные в жилых помещениях, могут предотвратить взрыв бытового газа, отравление угарным газом и возникновение пожара из-за неисправности бытовой техники или грубого нарушения условий ее эксплуатации путем автоматического отключения от сети.
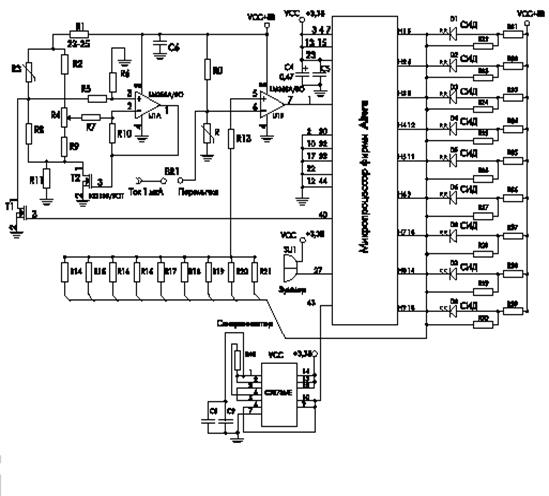
Рисунок 2 – Схема электрическая принципиальная индикатора оксида углерода и водорода СО-12.
Литература
1. Васин В.М. Электрический привод: Учеб. Пособие для техникумов. - М.: Высшая школа, 1984г.
2. Зюзин А.Ф., Поконов Н.З., Вишток А.М.: Монтаж, эксплуатация и ремонт электрооборудования промышленных предприятий и установок. 2-е изд., доп. и перераб. - М.: Высшая школа, 1980г.
3. Коновалова Л.Л., Рожкова Л.Д. Электроснабжение промышленных предприятий и установок. - М.: Высшая школа, 1980г.
4. Крановое электрооборудование: Справочник / Ю.В. Алексеев, А.П. Богословский. - М.: Энергия, 1979г.
5. Крановый электропривод: Справочник / А.Г. Яуре, Е.М. Певзнер. - М.: Энергоатомиздат, 1988г.
6. Липкин Б.Ю.: Электроснабжение промышленных пред- приятий и установок. - М.: Высшая школа, 1981г.
7. Методическое пособие по практической работе по электрооборудованию по теме: Расчет мощности и выбор кранового электродвигателя. Выбор аппаратуры управления и защиты.
Введение
Крановое электрооборудование является одним из основных средств комплексной механизации всех отраслей народного хозяйства. Подавляющее большинство грузоподъемных машин изготовляемых отечественной промышленностью, имеет привод основных рабочих механизмов, и поэтому действия этих машин в значительной степени зависит от качественных показателей используемого кранового оборудования.
Перемещение грузов, связанное с грузоподъемными операциями, во всех отраслях народного хозяйства, на транспорте и в строительстве осуществляется разнообразными грузоподъемными машинами.
Особые условия использования электропривода в грузоподъёмных машинах явились основой для создания специальных серий электрических двигателей и аппаратов кранового исполнения. В настоящее время крановое электрооборудование имеет в своём составе серии крановых электродвигателей переменного и постоянного тока, серии силовых и магнитных контроллеров, командоконтроллеров, кнопочных постов, конечных выключателей, тормозных электромагнитов и электрогидравлических толкателей, пускотормозных резисторов и ряд других аппаратов, комплектующих разные крановые электроприводы.
В крановом электроприводе начали довольно широко применять различные системы тиристорного регулирования и дистанционного управления по радио каналу или одному проводу.
Развитие машиностроения, занимающиеся производством грузоподъемных машин, является важным направлением развития народного хозяйства страны. Одной из главных особенностей "Азовмаша" является способность быстро реагировать на изменения маркетинговой ситуации и также быстро трансформировать производство на выпуск
новой продукции, удовлетворяющей индивидуальным требованиям своих постоянных и новых заказчиков.
Это позволило предприятию в кратчайшие сроки освоить производство железнодорожных цистерн нового поколения, современных крытых вагонов и вагонов-хопперов, большегрузных контейнеров-цистерн, автоцистерн для сжиженных газов, газозаправочных комплексов, мощных мостовых перегружателей и портальных кранов, оборудования для атомных электростанций, рам и колонн для ветроэнергетических установок, корпусов бронетехники и многих других видов изделий.
Около 500 единиц кузнечно-прессового оборудования позволяет производить холодно и горячештампованные заготовки и детали в широкой номенклатуре.
Предприятие производит товары бытового назначения - отопительную и проточную водонагревательную технику, газовые и электроплиты, котлы на газе и твердом топливе, изделия из пластмасс, трубы и соединительные элементы трубопроводов.
Общая часть
Технологический процесс цеха
Один из старейших цехов «Азовмаша» это - кузнечнопрессовый, где создаются мелкие, но самые необходимые в вагоностроении детали: поручни, рычаги, подвески… Словом, вся техническая «начинка», без которой вагоны оставались бы попросту неподвижными. Поэтому, насколько важна на заводе профессия кузнеца-штамповщика, обеспечивающего одну из основных линий производства, объяснять никому не нужно.
Производственный процесс изготовления поковок состоит из ряда последовательно выполняемых работ: технологических, контрольных, транспортных. Основными из технологических работ являются следующие: подготовка слитков или заготовок под ковку, нагрев заготовок или слитков перед ковкой, сама ковка, охлаждение или термическая обработка готовых поковок, очистка поковок от окалины и контроль качества поковок.
В кузнечном цехе, оборудованных молотами для изготовления мелких и средних поковок, используют в основном сортовой прокат и реже слитки небольшой массы. Со склада металла прокат поступает в заготовительное отделение, в котором в зависимости от размера сечения материала производится разрубка, ломка или отрезка обжатого или пруткового катаного материала на мерные заготовки. При использовании в качестве заготовок слитков, последние подвергают ремонту - удалению поверхностных дефектов или полной обдирке поверхности. Мерные заготовки и подготовленные слитки направляют из заготовительного отделения к нагревательным печам. Нагревательные печи в кузнечных и кузнечно-прессовых цехах расположены обычно рядом с молотами или прессами в одну линию.
В зависимости от марки стали, массы и формы поковок последние охлаждают на полу цеха или в таре, в термостатах, в неотапливаемых и отапливаемых колодцах или же в горячем состоянии подают в термическое отделение для первичной тепловой обработки. После термообработки проводят очистку поверхности поковок от окалины и контроль качества поковок.
Подъемно-транспортное оборудование обеспечивает связь между участками или отделениями цеха, осуществляя работы по подвозке, переноске, загрузке, подъему и передаче заготовок и поковок к соседнему участку или агрегату, а также удалению готовой продукции и отходов с производственного участка.
Дата: 2019-05-29, просмотров: 314.