Рис 4 Синхронизация приемника и передатчика на небольших расстояниях
Синхронизация передатчика и приемника нужна для того, чтобы приемник точно знал, в какой момент времени необходимо считывать новую информацию с линии связи. Эта проблема в сетях решается сложнее, чем при обмене данными между близко расположенными устройствами, например между блоками внутри компьютера или же между компьютером и принтером. На небольших расстояниях хорошо работает схема, основанная на отдельной тактирующей линии связи (рис 4),
так что информация снимается с линии данных только в момент прихода тактового импульса. В сетях использование этой схемы вызывает трудности из-за неоднородности характеристик проводников в кабелях. На больших расстояниях неравномерность скорости распространения сигнала может привести к тому, что тактовый импульс придет настолько позже или раньше соответствующего сигнала данных, что бит данных будет пропущен или считан повторно. Другой причиной, по которой в сетях отказываются от использования тактирующих импульсов, является экономия проводников в дорогостоящих кабелях.
Поэтому в сетях применяются так называемые самосинхронизирующиеся коды, сигналы которых несут для передатчика указания о том, в какой момент времени нужно осуществлять распознавание очередного бита (или нескольких бит, если код ориентирован более чем на два состояния сигнала). Любой резкий перепад сигнала - так называемый фронт - может служить хорошим указанием для синхронизации приемника с передатчиком.
а) Потенциальный код без возвращения к нулю (Non Return to Zero, NRZ): При передаче длинной последовательности единиц или нулей сигнал на линии не изменяется, поэтому приемник лишен возможности определять по входному сигналу моменты времени, когда нужно в очередной раз считывать данные. Поэтому при высоких скоростях и длинных последовательностях единиц или нулей может привести к считыванию некорректного значения бита.
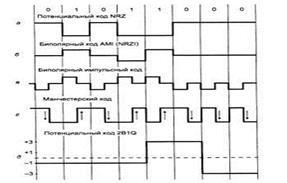
б) метод биполярного кодирования с альтернативной инверсией (Bipolar Alternate Mark Inversion, AMI). В этом методе используются три уровня потенциала - отрицательный, нулевой и положительный. 0 – это нулевой потенциал, а логическая 1 кодируется либо положительным потенциалом, либо отрицательным, при этом потенциал каждой новой единицы противоположен потенциалу предыдущей. Длинные последовательности нулей также опасны для кода AMI, как и для кода NRZ. Второй разновидностью такого метода является Потенциальный код с инверсией при единице (Non Return to Zero with ones Inverted, NRZI) При передаче нуля он передает потенциал, который был установлен в предыдущем такте (то есть не меняет его), а при передаче единицы потенциал инвертируется на противоположный
в) Биполярный импульсный код, в котором единица представлена импульсом одной полярности, а ноль – другой. Каждый импульс длится половину такта, а вторую половину такта импульс отсутствует. Такой код обладает отличными самосинхронизирующими свойствами, но из-за слишком широкого спектра биполярный импульсный код используется редко.
г) Манчестерский код. В локальных сетях Ethernet и Token Ring.он является самым распространенным методом кодирования. В нем для кодирования единиц и нулей используется перепад потенциала. При кодировании каждый такт делится на две части. Первая часть используется для передачи значения бита, а вторая – противоположным значением (перепадом потенциала). Так как сигнал изменяется по крайней мере один раз за такт передачи одного бита данных, то манчестерский код обладает хорошими самосинхронизирующими свойствами. Полоса пропускания манчестерского кода уже, чем у биполярного импульсного. Манчестерский код имеет еще одно преимущество перед биполярным импульсным кодом: в нем используются не три уровня сигнала, а два.
д) Потенциальный код 2B1Q
На рис. 5- д показан потенциальный код с четырьмя уровнями сигнала для кодирования данных. Это код 2B1Q, название которого отражает его суть - каждые два бита (2В) передаются за один такт сигналом, имеющим четыре состояния (1Q), Паре бит 00 соответствует потенциал -2,5 В, паре бит 01 соответствует потенциал -0,833 В, паре 11 - потенциал +0,833 В, а паре 10 - потенциал +2,5 В. При этом способе кодирования требуются дополнительные меры по борьбе с длинными последовательностями одинаковых пар бит, так как при этом сигнал превращается в постоянную составляющую. При случайном чередовании бит спектр сигнала в два раза уже, чем у кода NRZ, так как при той же битовой скорости длительность такта увеличивается в два раза. Таким образом, с помощью кода 2B1Q можно по одной и той же линии передавать данные в два раза быстрее, чем с помощью кода AMI или NRZI. Однако для его реализации мощность передатчика должна быть выше, чтобы четыре уровня четко различались приемником на фоне помех.
Существуют и другие методы кодирования, которые улучшают синхронизацию, а также улучшают контроль передачи данных. Например, методы кодирования с избыточными кодами. Избыточные коды основаны на разбиении исходной последовательности бит на порции, которые часто называют символами. Затем каждый исходный символ заменяется на новый, который имеет большее количество бит, чем исходный. Например, логический код 4В/5В, используемый в технологиях FDDI и Fast Ethernet, заменяет исходные символы длиной в 4 бита на символы длиной в 5 бит. Соответствие исходных и результирующих кодов 4В/5В представлено ниже на Рис.6.
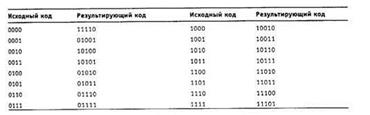
Рис.6. Кдирование 4В/5В
Такое дополнение 1 битом позволяет не только улучшить синхронизацию (5-й бит добавляется так, чтобы не было длинных последовательностей 1 или 0), но и определить разрешенные комбинации из 5 бит. В таблице представлено 16 комбинаций ( а существует всего 32). Если приемник получает неразрешенную комбинацию, то это для него сигнал о неверно принятых данных.
Использование таблицы перекодировки является очень простой операцией, поэтому этот подход не усложняет сетевые адаптеры и интерфейсные блоки коммутаторов и маршрутизаторов.
Для обеспечения заданной пропускной способности линии передатчик, использующий избыточный код, должен работать с повышенной тактовой частотой. Так, для передачи кодов 4В/5В со скоростью 100 Мб/с передатчик должен работать с тактовой частотой 125 МГц. При этом спектр сигнала на линии расширяется по сравнению со случаем, когда по линии передается чистый, не избыточный код. Тем не менее спектр избыточного потенциального кода оказывается уже спектра манчестерского кода, что оправдывает дополнительный этап логического кодирования, а также работу приемника и передатчика на повышенной тактовой частоте.
Формула Найквиста
Здесь М — количество различимых состояний информационного параметра.
Если сигнал имеет два различимых состояния, то пропускная способность равна удвоенному значению ширины полосы пропускания линии связи (рис. 1 а). Если же в передатчике используется более двух устойчивых состояний сигнала для кодирования данных, то пропускная способность линии повышается, так как за один такт работы передатчик передает несколько битов исходных данных, например 2 бита при наличии четырех различимых состояний сигнала (рис. 1 б).
Хотя в формуле Найквиста наличие шума в явном виде не учитывается, косвенно его влияние отражается в выборе количества состояний информационного сигнала. Для повышения пропускной способности линии связи следовало бы увеличивать количество состояний, но на практике этому препятствует шум на линии. Например, пропускную способность линии, сигнал которой показан на рис. 1 б, можно увеличить еще в два раза, применив для кодирования данных не 4, а 16 уровней. Однако если амплитуда шума время от времени превышает разницу между соседними уровнями, то приемник не сможет устойчиво распознавать передаваемые данные. Поэтому количество возможных состояний сигнала фактически ограничивается соотношением мощности сигнала и шума, а формула Найквиста определяет предельную скорость передачи данных в том случае, когда количество состояний уже выбрано с учетом возможностей устойчивого распознавания приемником.
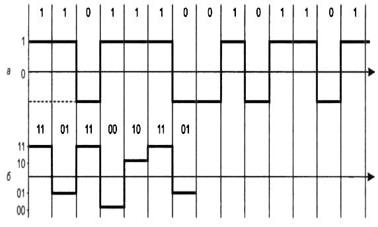
Рис. 1. Повышение скорости передачи за счет дополнительных состояний сигнала
Теорема Котельникова
В 1933 году В.А. Котельниковым доказана теорема отсчетов [6, 32], имеющая важное значение в теории связи: непрерывный сигнал  с ограниченным спектром можно точно восстановить (интерполировать) по его отсчетам
с ограниченным спектром можно точно восстановить (интерполировать) по его отсчетам  , взятым через интервалы
, взятым через интервалы  , где
, где  – верхняя частота спектра сигнала.
– верхняя частота спектра сигнала.
Теорема Котельникова
Материал из Национальной библиотеки им. Н. Э. Баумана
Последнее изменение этой страницы: 16:23, 14 ноября 2016.
Теорема Котельникова — фундаментальное утверждение в области цифровой обработки сигналов, связывает непрерывные и дискретные сигналы и гласит, что «любую функцию F(t){\displaystyle F(t)}, спектр которой ограничен 0 и f1{\displaystyle f_{1}}, можно непрерывно передавать с любой точностью при помощи чисел, следующих друг за другом через 1/(2f1){\displaystyle 1/(2f_{1})} секунд».
Свойства выборочной функции
svb(x,y)=s(x,y)comb(2ν1x,2ν2y)=(1/(4ν1ν2))∞∑k,n=−∞s(k/2ν1,n/2ν2)δ[x−(k/2ν1),y−(n/2ν2)] (5){\displaystyle s_{vb}(x,y)=s(x,y)\operatorname {comb} (2\nu _{1}x,2\nu _{2}y)=(1/(4\nu _{1}\nu _{2}))\sum _{k,n=-\infty }^{\infty }s(k/2\nu _{1},n/2\nu _{2})\delta [x-(k/2\nu _{1}),y-(n/2\nu _{2})]\quad \quad ~\color {Maroon}(5)\!}
Функция (1){\displaystyle \color {Maroon}(1)\!} называемая выборочной функцией, представляет собой двумерную δ{\displaystyle \delta \!} - решётку из функций δ[x−(k/2ν1),y−(n/2ν2)]{\displaystyle \delta [x-(k/2\nu _{1}),y-(n/2\nu _{2})]\!}с амплитудой (1/(4ν1ν2))×s(k/2ν1,n/2ν2){\displaystyle (1/(4\nu _{1}\nu _{2}))\times s(k/2\nu _{1},n/2\nu _{2})\!}. Рассмотрим её основные свойства:
Функция svb{\displaystyle s_{vb}\!} имеет размерность исходного сигнала s{\displaystyle s\!}.
Объем выборки пропорционален сумме выборочных значений
∞∬−∞svb(x,y)dxdy=(1/(4ν1ν2))∞∑k,n=−∞∞∬−∞s(x,y)δ[x−(k/2ν1),y−(n/2ν2)]dxdy=(1/(4ν1ν2))∞∑k,n=−∞s(k/2ν1,n/2ν2){\displaystyle \iint \limits _{-\infty }^{\infty }s_{vb}(x,y)dxdy=(1/(4\nu _{1}\nu _{2}))\sum _{k,n=-\infty }^{\infty }\iint \limits _{-\infty }^{\infty }s(x,y)\delta [x-(k/2\nu _{1}),y-(n/2\nu _{2})]dxdy=(1/(4\nu _{1}\nu _{2}))\sum _{k,n=-\infty }^{\infty }s(k/2\nu _{1},n/2\nu _{2})\!}
Спектр выборочной функции равен бесконечной двумерной сумме дискретно смещенных финитных спектров исходного сигнала и совпадает со вспомогательной функцией (2){\displaystyle \color {Maroon}(2)\!} на рис. 2, так что
~svb(νx,νy)=∞∑k,n=−∞~s(νx−k2ν1,νy−n2ν2){\displaystyle {\tilde {s}}_{vb}(\nu _{x},\nu _{y})=\sum _{k,n=-\infty }^{\infty }{\tilde {s}}(\nu _{x}-k2\nu _{1},\nu _{y}-n2\nu _{2})\!}. (6){\displaystyle \quad \quad \color {Maroon}(6)\!}
Свёртка 4ν1ν2svb(x,y){\displaystyle 4\nu _{1}\nu _{2}s_{vb}(x,y)\!} с интерполяционной функцией sinc(π2ν1x,π2ν2y){\displaystyle \operatorname {sinc} (\pi 2\nu _{1}x,\pi 2\nu _{2}y)\!} восстанавливает исходный сигнал с помощью ряда Котельникова (4){\displaystyle \color {Maroon}(4)\!}, который можно записать в виде s(x,y)−4ν1ν2svb(x,y)⊗sinc(π2ν1x,π2ν2y){\displaystyle s(x,y)-4\nu _{1}\nu _{2}s_{vb}(x,y)\otimes \operatorname {sinc} (\pi 2\nu _{1}x,\pi 2\nu _{2}y)\!}.
На практике часто используют выборочную функцию s′vb(x,y)=4ν1ν2s(x,y)comb(2ν1x,2ν2y){\displaystyle s'_{vb}(x,y)=4\nu _{1}\nu _{2}s(x,y)\operatorname {comb} (2\nu _{1}x,2\nu _{2}y)\!}, отличающуюся от (4){\displaystyle \color {Maroon}(4)\!} постоянным коэффициентом. Ее свойства совпадают со свойствами функции svb(x,y){\displaystyle s_{vb}(x,y)\!}.
Переналожение спектров
Пусть выборка осуществляется через произвольные промежутки △x⩽1/2ν1{\displaystyle \vartriangle x\leqslant 1/2\nu _{1}\!}, т.е. 1/△x⩾2ν1{\displaystyle 1/\vartriangle x\geqslant 2\nu _{1}\!} ; △y⩽1/2ν2{\displaystyle \vartriangle y\leqslant 1/2\nu _{2}\!}, т.е. 1/△y⩾2ν2{\displaystyle 1/\vartriangle y\geqslant 2\nu _{2}\!} . В этом случае вспомогательная функция (2){\displaystyle \color {Maroon}(2)\!} имеет вид
<center>~svb(νx,νy)=~s(νx,νy)⊗(△x,△y)comb(△xνx,△yνy) (2′){\displaystyle {\tilde {s}}_{vb}(\nu _{x},\nu _{y})={\tilde {s}}(\nu _{x},\nu _{y})\otimes (\vartriangle x,\vartriangle y)\operatorname {comb} (\vartriangle x\nu _{x},\vartriangle y\nu _{y})\quad \quad ~\color {Maroon}(2')\!}
Подставляя ее в (3){\displaystyle \color {Maroon}(3)\!}, в результате обратного преобразования Фурье получим выражение для обобщенного ряда Котельникова
s(x,y)=4ν1ν2△x△y∞∑k,n=−∞s(k△x,n△y)×sinc[2πν1(x−k△x),2πν2(y−n△y)] (4′){\displaystyle s(x,y)=4\nu _{1}\nu _{2}\vartriangle x\vartriangle y\sum _{k,n=-\infty }^{\infty }s(k\vartriangle x,n\vartriangle y)\times \operatorname {sinc} [2\pi \nu _{1}(x-k\vartriangle x),2\pi \nu _{2}(y-n\vartriangle y)]\quad \quad ~\color {Maroon}(4')\!}
которое при △x=1/2ν1{\displaystyle \vartriangle x=1/2\nu _{1}\!}, △y=1/2ν2{\displaystyle \vartriangle y=1/2\nu _{2}\!} переходит в ряд Котельникова (4){\displaystyle \color {Maroon}(4)\!}.
Если теперь интервалы выборки △x>1/2ν1{\displaystyle \vartriangle x>1/2\nu _{1}\!}, т.е. 1/△x<2ν1{\displaystyle 1/\vartriangle x<2\nu _{1}\!} ; △y>1/2ν2{\displaystyle \vartriangle y>1/2\nu _{2}\!}, т.е. 1/△y<2ν2{\displaystyle 1/\vartriangle y<2\nu _{2}\!}, то для выборочной функции (5){\displaystyle \color {Maroon}(5)\!}имеем
svb(x,y)=s(x,y)comb(x/△x,y△y) (7){\displaystyle s_{vb}(x,y)=s(x,y)\operatorname {comb} (x/\vartriangle x,y\vartriangle y)\quad \quad ~\color {Maroon}(7)\!}
В свою очередь для спектра выборочной функции по аналогии с (6){\displaystyle \color {Maroon}(6)\!}
~svb(νx,νy)=∞∑k,n=−∞~s[νx−(k/△x),νy−(n/△y)] (2′′){\displaystyle {\tilde {s}}_{vb}(\nu _{x},\nu _{y})=\sum _{k,n=-\infty }^{\infty }{\tilde {s}}[\nu _{x}-(k/\vartriangle x),\nu _{y}-(n/\vartriangle y)]\quad \quad ~\color {Maroon}(2'')\!}
На рис. 4 (а,б) приведены одномерные спектры ~s(0,νy){\displaystyle {\tilde {s}}(0,\nu _{y})\!} и ~svb(0,νy){\displaystyle {\tilde {s}}_{vb}(0,\nu _{y})\!}.
Рис. 4. Геометрическая модель двумерного одномерных пространственно-частотных спектров (ПЧС), идентифицирующая их переналожение: а- ПЧС входного сигнала; б - ПЧС выборочной функции при △y>1/2ν2{\displaystyle \vartriangle y>1/2\nu _{2}\!}
Так как
~svb(νx,νy)rect(νx/2ν1,νy/2ν2)≠~s(νx,νy){\displaystyle {\tilde {s}}_{vb}(\nu _{x},\nu _{y})\operatorname {rect} (\nu _{x}/2\nu _{1},\nu _{y}/2\nu _{2})\neq {\tilde {s}}(\nu _{x},\nu _{y})\!}, → (8){\displaystyle \to ~\color {Maroon}(8)\!}
то использование низкочастотного ПЧФ с передаточной функцией rect(νx/2ν1,νy/2ν2){\displaystyle \operatorname {rect} (\nu _{x}/2\nu _{1},\nu _{y}/2\nu _{2})\!} при передаче по каналу связи svb(x,y){\displaystyle s_{vb}(x,y)\!} в виде (7){\displaystyle \color {Maroon}(7)\!} не позволяет выделить спектр ~s(νx,νy){\displaystyle {\tilde {s}}(\nu _{x},\nu _{y})\!} исходного сигнала в чистом виде. В отфильтрованном спектре (8){\displaystyle \color {Maroon}(8)\!} будут присутствовать частоты от соседних налагающихся спектров ~s[νx±(1/△x),νy±(1/△y)]{\displaystyle {\tilde {s}}[\nu _{x}\pm (1/\vartriangle x),\nu _{y}\pm (1/\vartriangle y)]\!} (рис. 4б). В результате переналожения спектров возникают так называемые шумы дискретизации.
Многомашинные объединения
Кластер представляет собой систему из нескольких компьютеров (в большинстве случаев серийно выпускаемых), имеющих общий разделяемый ресурс для хранения совместно обрабатываемых данных (обычно набор дисков или дисковых массивов) и объединенных высокоскоростной магистралью (рис. 13.3).
В кластерной системе некоторое распределенное приложение параллельно на нескольких узлах обрабатывает общий набор данных, как правило, таким образом, чтобы у пользователя возникла иллюзия работы на одной машине.
Обычно в кластерных системах не обеспечивается единая операционная среда для работы общего набора приложений на всех узлах кластера. То есть каждый компьютер кластера - это автономная система с отдельным экземпляром ОС и своими, принадлежащими только ей системными ресурсами: набором заведенных пользователей, системными буферами, областью свопинга и т. п. Приложение, запущенное на нем, может видеть только общие диски или отдельные участки памяти. На узлах кластера работают специально написанные для такой конфигурации приложения, параллельно обрабатывающие общий набор данных. На каждой из машин они представлены рядом процессов, программ, взаимодействующих с помощью кластерного программного обеспечения. Таким образом, кластерное ПО - это лишь средство для взаимодействия узлов и синхронизации доступа к общим данным. Кластер как параллельная система формируется на прикладном уровне, а не на уровне операционной системы.
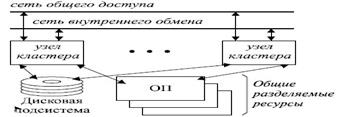
Рис. 13.3. Структура кластера
В настоящее время такие системы имеют две основные области применения: параллельные серверы баз данных и высоконадежные вычислительные комплексы. Рынок параллельных СУБД и есть фактически рынок кластеров приложений. Высоконадежные комплексы представляют собой группу узлов, на которых независимо друг от друга выполняются некоторые важные приложения, требующие постоянной, непрерывной работы. То есть в такой системе на аппаратном уровне фактически поддерживается основной механизм повышения надежности - резервирование. Причем узлы находятся в так называемом "горячем" резерве, и каждый из них в любой момент готов продолжить вычисления при выходе из строя какого-либо узла. При этом все приложения с отказавшего узла автоматически переносятся на другие машины комплекса. Такая система также формально является кластером, хотя в ней отсутствует параллельная обработка общих данных. Эти данные обычно монопольно используются выполняемыми в рамках кластера приложениями и должны быть доступны для всех узлов.
Если в кластере его узлы разделяют некоторые ресурсы, то параллельные системы другого класса - системы вычислений с массовым параллелизмом (MPP) - строятся из отдельных полностью независимых компьютеров, соединенных только высокоскоростной магистральюили коммуникационными каналами (рис. 13.4). Это могут быть либо просто несколько серийно выпускаемых UNIX-машин, соединенных с помощью высокопроизводительной сетевой среды, либо специально сконструированная система из отдельных функциональных блоков, объединенных коммутатором.
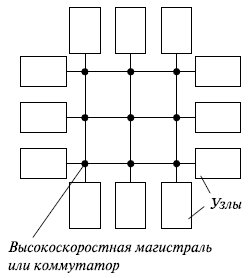
Рис. 13.4. Структура MPP-системы
В такой системе адресное пространство состоит из отдельных адресных пространств, которые логически не связаны между собой и доступ к которым не может быть осуществлен аппаратно другим процессором.
При этом для обмена данными используется механизм передачи сообщений между процессорами. Поэтому эти машины часто называют машинами с передачей сообщений. Пользователь может определить логический номер процессора, к которому он подключен, и организовать обмен сообщениями с другими процессорами.
На машинах MPP-архитектуры используются два варианта работы операционной системы. В одном из них полноценная операционная системаработает только на управляющей машине (front-end); на каждом отдельном модуле функционирует сильно урезанный вариант ОС, обеспечивающий работу только расположенной в нем ветви параллельного приложения. Во втором варианте на каждом модуле работает полноценная, как правило, UNIX-подобная ОС, устанавливаемая отдельно.
Программирование в такой системе - достаточно сложная задача.
Она требует специального инструментария и особого системного программного обеспечения для работы параллельных приложений, которые ориентированы на функционирование параллельных процессов, распределенных по узлам MPP-системы, с обменом сообщениями между ними.
Повышение производительности машин с массовым параллелизмом путем увеличения в них числа процессоров имеет определенные ограничения. Чем большее число процессоров входит в состав MPP-системы, тем длиннее каналы передачи управления и данных, а значит, и тем меньше тактовая частота. Происшедшее возрастание нормы массивности для больших машин до 512 и даже 64К процессоров обусловлено не ростом размеров машины, а увеличением степени интеграции схем, позволившей за последние годы резко повысить плотность размещения элементов в устройствах. Топология сети межпроцессорного обмена в такого рода системах может быть различной.
Главным преимуществом MPP-систем является их хорошая масштабируемость: в отличие от SMP-систем, здесь каждый процессор имеет доступтолько к своей локальной памяти, в связи с чем не возникает необходимости в потактовой синхронизации процессоров. Практически все рекорды по производительности на сегодня устанавливаются на машинах именно такой архитектуры, состоящих из нескольких тысяч процессоров.
Основными недостатками систем данного типа являются следующие:
отсутствие общей памяти заметно снижает скорость межпроцессорного обмена, поскольку нет общей среды для хранения данных, предназначенных для обмена между процессорами;
требуется специальная техника программирования для реализации обмена сообщениями между процессорами;
каждый процессор может использовать только ограниченный объем локального банка памяти;
вследствие указанных архитектурных недостатков требуются значительные усилия для того, чтобы максимально задействовать системные ресурсы, следствием чего является высокая цена программного обеспечения для MPP-систем с раздельной памятью.
Подведем некоторые итоги, касающиеся областей применимости систем параллельной обработки данных различных типов.
SMP-системы потенциально обладают достаточными возможностями для обеспечения необходимой для большинства применений производительности: вполне естественно увеличивать число процессоров, а не ставить рядом еще один компьютер. Добавление одного процессора гарантированно увеличивает производительность, а добавление, например, узла в кластер адекватного ускорения не даст. Более того, в некоторых случаях общая производительность системы может даже упасть, когда узлы кластера начинают активно конкурировать за доступ к общим ресурсам, и взаимные блокировки сводят на нет преимущества параллельной обработки.
NUMA-системы создаются для вполне определенных целей - обеспечения масштабных расчетов. Системы, использующие эту архитектуру, прежде всего применяются для уникальных высококачественных и высокопроизводительных прикладных программ, требующих более восьми процессоров. Однако они имеют высокую стоимость и требуют уникального ПО (прикладные программы и ОС).
Для современных систем помимо вполне традиционных требований по производительности, масштабируемости, цене дополнительные высокие требования предъявляются к надежности их работы. Именно по этим соображениям вычислительные комплексы на основе кластеров или MPP-машин завоевывают все большую популярность.
MPP-системы обладают рядом преимуществ, главным из которых является лучшая среди всех рассмотренных архитектур масштабируемость. Именно поэтому MPP-компьютеры обычно используются при больших ресурсоемких вычислениях. Конечно, они применяются и при построении больших баз данных, и в отказоустойчивых вычислительных комплексах. Но здесь их использование довольно ограничено. Это отчасти связано с тем, что они все-таки дороже кластеров и имеют достаточно большую начальную цену. Кластер же можно построить из относительно дешевых машин произвольной конфигурации.
Приведенная классификация систем параллельной обработки данных достаточно условна. Разработчики вычислительных систем не проектируют машину какого-то специального класса, а стараются создать более производительную архитектуру. Кроме этого, сам пользовательможет с использованием стандартных компонентов спроектировать комплекс, архитектурно и функционально наиболее подходящий для решения конкретной задачи.
Транспьютеры
Для построения многопроцессорных систем могут быть использованы специально разработанные процессоры, называемые транспьютерами. Они были созданы в середине 1980-х годов фирмой INMOS Ltd (ныне - подразделение STMicroelecTRoniCS).
Транспьютер - это микропроцессор со встроенными средствами межпроцессорной коммуникации, предназначенной для построения многопроцессорных систем. Его название происходит от слов TRansfer (передатчик) и computer (вычислитель).
Транспьютер включает в себя средства для выполнения вычислений (ЦП, АЛУ с плавающей точкой, внутрикристальную память) и 4 канала для связи (линка) с другими транспьютерами и/или другими устройствами. Каждый линк представляет собой 2 однонаправленных последовательных канала передачи информации. Встроенный интерфейс позволяет подключать внешнюю память емкостью до 4 Гбайт (рис. 13.5).
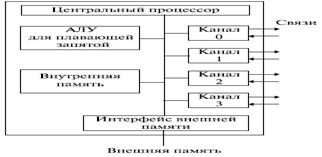
Рис. 13.5. Структура транспьютера
Многопроцессорная система может создаваться из набора транспьютеров, которые функционируют независимо и взаимодействуют через последовательные каналы связи (рис. 13.6).
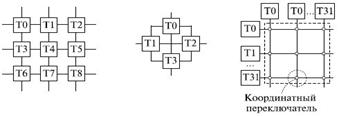
Рис. 13.6. Структуры многопроцессорных систем на базе транспьютеров
Организация транспьютеров и многопроцессорных систем на их основе базируется на языке Occam, специально разработанном в начале 1980-х годов группой ученых из Оксфорда под руководством Дэвида Мэя по заданию компании INMOS в рамках работ по созданию транспьютеров. Отметим основные характеристики этого языка с точки зрения его применения для программирования транспьютерных систем:
выполнение задачи разбивается на процессы, которые могут выполняться параллельно;
размещение процессов не привязано к конкретному оборудованию: необязательно каждому процессу должен ставиться в соответствие свой транспьютер - несколько процессов могут выполняться на одном транспьютере;
язык позволяет описать размещение процессов по оборудованию;
язык позволяет описать, как эти процессы обмениваются между собой данными (какой процесс принимает информацию, от какого процесса и в каком объеме).
При передаче данных в линк процесс должен исполнить команду вывода. Процесс, исполнивший такую команду, задерживается до тех пор, пока все данные не будут переданы. Аналогично, при приеме данных из линка процесс должен исполнить команду ввода. При исполнении такой команды процесс блокируется до тех пор, пока буфер не будет заполнен данными. Взаимодействие с внешним устройством через линкпозволяет транспьютеру синхронизовать свою деятельность с этими устройствами без использования механизма прерываний.
Использование такого подхода позволило организовать виртуальные каналы связи между процессами, которые могли размещаться как на единственном транспьютере, так и на нескольких транспьютерах, и виртуальные линки между процессами. Любой транспьютер может одновременно образовывать любое число параллельных процессов. Он имеет специальный планировщик, который производит распределение процессорного времени между этими процессами. Тем самым появляется возможность, имея всего лишь один транспьютер, написать параллельную программу, которая полностью выполняется на нем. Задача разбивается на ряд процессов, и все эти процессы параллельно протекают внутри одного транспьютера, периодически останавливаясь для получения данных друг от друга. Систему можно расширить другими транспьютерами и перенести на них ряд процессов. При этом нужно просто переопределить таблицу связей процессов, указав, на каком транспьютере теперь выполняется тот или иной процесс. Сама же программа изменений не претерпевает, а вычислительная мощность системы, естественно, увеличивается.
Помимо интересных возможностей, связанных с построением мультипроцессорных систем без привлечения дополнительного оборудования, в транспьютерах были реализованы идеи, направленные на повышение их вычислительной мощности. Среди них хотелось бы отметить то, что блок регистров транспьютера организован в виде стека. Это привело к использованию преимущественно безадресной системы команд, что обеспечило даже более высокую производительность, чем RISC-архитектура. Второй момент, который следует выделить, - это одновременное исполнение группы, в которую входило до 8 команд, что обеспечивало полную загрузку устройств процессора. И все это было реализовано в конце 1980-х годов, задолго до появления EPIC и Itanium.
На момент своего появления транспьютеры были самыми быстродействующими 32-разрядными микропроцессорами. В процессе своего недолго развития их характеристики достигли следующих значений:
производительность: 200 MIPS, 25 MFLOPS (на 64-разрядном процессоре с плавающей точкой);
емкость внутрикристальной памяти: 16 Кбайт;
скорость обмена по линку: 100 Мбит/с.
В середине 1990-х, в эпоху расцвета микропроцессоров этого семейства, фирма INMOS помимо собственно транспьютеров поставляла широкий набор трэмов (TRem - TRansputer Extension Module) - устройств ввода-вывода с линком в качестве интерфейса. В частности, поставлялись трэмы, позволявшие подключить к транспьютеру через линк адаптеры Ethernet или SCSI. В целях увеличения числа физических связей был разработан программируемый коммутатор, осуществляющий передачу сообщения с любого из 32 входов на любой из 32 выходов.
Транспьютеры успешно использовались в различных областях от встроенных систем до суперЭВМ. Однако технология транспьютеров серьезного развития не получила, так как начиная с Pentium Pro в универсальные микропроцессоры введена возможность соединения процессоров в микропроцессорную систему, что обесценило главное преимущество транспьютеров - возможность построения многопроцессорных систем без дополнительных аппаратных затрат. В настоящее время транспьютеры не производятся, они вытеснены похожими разработками конкурентов, особенно Texas INsTRuments (TMS320) и Intel (80860).
Краткие итоги. В лекции представлена классификация Флинна систем многопроцессорной обработки данных, основанная на понятии потока, а также классификация многопроцессорных и многомашинных вычислительных систем на основе степени разделения вычислительных ресурсов системы. Рассмотрены структура и особенности работы SMP-, NUMA-, MPP-систем, а также кластеров. Описан специальный классмикропроцессоров - транспьютеры, созданный для построения мультипроцессорных систем.
Сетевые адаптеры для технологии Gigabit Ethernet предназначены для установки в сервера и мощные рабочие станции. Для повышения эффективности работы они способны поддерживать полнодуплексный режим обмена информацией.
формат единицы информации(кадра) в локальной вычислительной сети.
Подуровни семиуровневой модели OSI :
MAC (Media Access Control) — управление доступом к среде
1. Подуровень канального уровня. Определяет методы доступа к среде передачи данных, формат кадров и адресацию.
2. Общий термин для описания метода доступа сетевых устройств к среде передачи данных.
Уровни модели OSI [OSI layers ] — группы протоколов передачи данных, связанных между собой иерархическими отношениями. Каждый уровень обслуживает вышестоящий уровень и, в свою очередь, пользуется услугами нижестоящего. Наименование уровней OSI (от нижнего к верхнему):
1. Физический уровень [physical layer ] — описывает механические, электрические и функциональные характеристики среды передачи данных, а также средства, предназначенные для установления, поддержания и разъединения связи (соединений). При необходимости обеспечивает кодирование и модуляцию сигнала, передаваемого в сети.
2. Канальный уровень [data link layer ] — отвечает за надежность передачи данных по определенному каналу между двумя соседними узлами, а также за установление, поддержание и разрыв соединений. Блок данных, передаваемых на канальном уровне, называется кадром. Процедуры канального уровня добавляют в передаваемые кадры соответствующие адреса, контролируют ошибки и при необходимости осуществляют повторную передачу кадров. Реализует методы доступа к среде передачи, основанные на передаче маркера (token passing ) или на соперничестве ( Contention).
3. Сетевой уровень [network layer ] — обеспечивает маршрутизацию пакетов (то есть передачу через несколько каналов по одной или нескольким сетям), что обычно требует включения в пакет сетевого адреса получателя. Отвечает также за обработку ошибок, мультиплексирование пакетов и управление протоколами данных. Самые известные протоколы этого уровня: X.25 (в сетях с коммутацией пакетов), IP (в сетях TCP/IP ), и IPX (в сетях NetWare ). Кроме того, к сетевому уровню относятся протоколы построения маршрутных таблиц для маршрутизаторов, например, OSPF, RIP, ES-IS и IS-IS.
4. Транспортный уровень [transport layer ] — обеспечивает предоставление услуг по надежной передаче данных между оконечными узлами сети, в том числе взаимодействующими через несколько промежуточных узлов коммутации или даже транзитных сетей. Служит границей, ниже которой единицей передаваемой информации являются пакеты, а выше — сообщения. В рамках транспортного протокола модели OSI предусмотрены пять классов сервиса передачи сообщений (нумеруются 0—4).
5. Сеансовый уровень [session layer ] — обеспечивает предоставление услуг, связанных с организацией и синхронизацией обмена данными между процессами на уровне представления.
6. Уровень представления данных [presentation layer ] — включает служебные операции, к которым обращается прикладной уровень для интерпретации и преобразования передаваемых и принимаемых данных. Обеспечивает установление общих правил взаимодействия двух ЭВМ различных типов.
7. Прикладной уровень [application layer ] – отвечает за взаимодействие прикладных программ и интерфейс пользователя. Предоставляемые им услуги: электронная почта, идентификация пользователей, передача файлов и т. п.
Формат кадра
Существует несколько форматов Ethernet-кадра.
· Первоначальный Version I (больше не применяется).
· Ethernet Version 2 или Ethernet-кадр II, ещё называемый DIX (аббревиатура первых букв фирм-разработчиков DEC, Intel, Xerox) — наиболее распространена и используется по сей день. Часто используется непосредственно протоколом Интернет.
Наиболее распространенный формат кадра Ethernet II
· Novell—внутренняя модификация IEEE 802.3 без LLC (Logical Link Control).
· Кадр IEEE 802.2 LLC.
· Кадр IEEE 802.2 LLC/SNAP.
· Некоторые сетевые карты Ethernet, производимые компанией Hewlett-Packardиспользовали при работе кадр формата IEEE 802.12, соответствующий стандарту100VG-AnyLAN.
В качестве дополнения Ethernet-кадр может содержать тег IEEE 802.1Qдля идентификацииVLAN, к которой он адресован, иIEEE 802.1pдля указания приоритетности.
Разные типы кадра имеют различный формат и значение MTU.
Коммутатор
Коммутатор (switch) – устройство, осуществляющее выбор одного из возможных вариантов направления передачи данных.
В коммуникационной сети коммутатор является ретрансляционной системой (система, предназначенная для передачи данных или преобразования протоколов), обладающей свойством прозрачности (т.е. коммутация осуществляется здесь без какой-либо обработки данных). Коммутатор не имеет буферов и не может накапливать данные. Поэтому при использовании коммутатора скорости передачи сигналов в соединяемых каналах передачи данных должны быть одинаковыми. Канальные процессы, реализуемые коммутатором, выполняются специальными интегральными схемами. В отличие от других видов ретрансляционных систем, здесь, как правило, не используется программное обеспечение.
Вначале коммутаторы использовались лишь в территориальных сетях. Затем они появились и в локальных сетях, например, частные учрежденческие коммутаторы. Позже появились коммутируемые локальные сети. Их ядром стали коммутаторы локальных сетей.
Рис. 6.5. Структура коммутатора
Коммутатор (Switch) может соединять серверы в кластер и служить основой для объединения нескольких рабочих групп. Он направляет пакеты данных между узлами ЛВС. Каждый коммутируемый сегмент получает доступ к каналу передачи данных без конкуренции и видит только тот трафик, который направляется в его сегмент. Коммутатор должен предоставлять каждому порту возможность соединения с максимальной скоростью без конкуренции со стороны других портов (в отличие от совместно используемого концентратора). Обычно в коммутаторах имеются один или два высокоскоростных порта, а также хорошие инструментальные средства управления. Коммутатором можно заменить маршрутизатор, дополнить им наращиваемый маршрутизатор или использовать коммутатор в качестве основы для соединения нескольких концентраторов. Коммутатор может служить отличным устройством для направления трафика между концентраторами ЛВС рабочей группы и загруженными файл-серверами.
Коммутатор локальной сети
Коммутатор локальной сети (local-area network switch) – устройство, обеспечивающее взаимодействие сегментов одной либо группы локальных сетей.
Коммутатор локальной сети, как и обычный коммутатор, обеспечивает взаимодействие подключенных к нему локальных сетей (рис. 1.44). Но в дополнение к этому он осуществляет преобразование интерфейсов, если соединяются различные типы сегментов локальной сети. Чаще всего это сети Ethernet, кольцевые сети IBM, сети с оптоволоконным распределенным интерфейсом данных.
Рис. 6.6. Схема подключения локальных сетей к коммутаторам
В перечень функций, выполняемых коммутатором локальной сети, входят:
- обеспечение сквозной коммутации;
- наличие средств маршрутизации;
- поддержка простого протокола управления сетью;
- имитация моста либо маршрутизатора;
- организация виртуальных сетей;
- скоростная ретрансляция блоков данных.
Стек протоколов TCP/IP
Символьные адреса
Используются в больших сетях, которые строятся по иерархической структуре (древовидной), при этом предоставляется необходимое количество уровней дерева. Каждый уровень называется доменом. Каждый уровень имеет свой уникальный домен. Каждый уровень отвечает за уникальность имен своих поддоменов.
Например: символьные адрес задан следующим образом: k227.xt.tstu.tver.ru -> рис40
· InterNIC: .ru, .ua, .us, .de, .uk, .il, .su
· .com – коммерческие организации
· .edu – образовательные учреждения
· .net – поддерживающие сети
· .org – некоммерческие организации
· .gov – правительственные организации
Соответствие между IP адресами и символьными адресами устанавливается с помощью специальной распределенной службы – системой доменных имен DNS (Domain Name System). Служба работает по принципу клиент-сервер.
Для каждого домена создается свой DNS сервер, в котором хранится отображение типа: IP адрес – символьный адрес для всех узлов, которые находятся на нижележащем уровне. Кроме того создаются ссылки на нижележащие DNS сервера. Рис41.
URL – универсальныйлокаторресурсов(universal resource locator).
Имя @ (at) домен постового сервера.
Classless Internet Domain Routing – CIDR – технология бесклассовой междоменной адресации.
Числовые адреса
IP – 4 байта, разделенные между собой точками. Например: 141.35.27.80. -> 10001101|00100011|00011011|0101000
141.35.0.0 – адрес подсети, 0.0.27.80 – адрес узла. Граница между адресами подсети и узла зависит от класса.
Различают следующие классы IP адресов: A, B, C, D, E – классовая система адресации.
В зависимости от значения первых битов первого байта определяется класс адреса. Рис42
· Если 1 бит IP-адреса = 0 -> адрес класса А. 2^24≈16,8 млн узлов – громадные сети. //Google 8.8.8.8
· Если первые два бита 10 -> адрес класса В. 2^14 подсетей и 2^16 узлов – средние сети. //провайдер
· Если первые три бита 110 -> адрес класса С. 2^21 подсетей и 2^8 узлов – самая распространенная система адресации.
- Если значение первых четырех битов 1110 ->адрес класса D. Класс групповых адресов. Адрес multicast. Если в пакете адрес назначения является multicast, то этот пакет должен быть доставлен сразу нескольким узлам, которые образуют группу с соответствующим адресом. CDN технология. Основное назначение групповой адресации – распространение информации по всей схеме до модели (один источник – много адресатов). [аудио информация или видео информация]. Для распространения информации многим адресатам используется специальный протокол IGMP. Маршрутизаторы, которые поддерживают такой протокол добавляют информацию для всех узлов. Все кто хотят подсоединиться или подключиться к этому протоколу информируют источника создания инициатора группы. Модернизируются сами маршрутизаторы и их протоколы.
· Если первые 5 байтов 1110 -> адрес класса Е. реально не используется, он зарезервированный
· Вывод: любой IP идентифицируется по первым битам первого байта:
A. 0 – 127
B. 128 – 191
C. 192 – 223
D. 224 – 239
E. 240 – 247
Вопрос 1.определение основных понятий: линия связи, канал связи, сообщение, информация, сигнал.
Основные понятия: информация, сообщение, сигнал. Простейшая структурная схема телекоммуникационной системы.
Информация – совокупность сведений о каких-либо событиях, предметах окружающего мира, которую необходимо передать каким-либо способом получателю (человеку или устройству), для которого она имеет некоторую ценность и заранее неизвестна.
Сообщение – форма предоставления информации (речь, текст, музыка, рисунок) посредством совокупности конечного набора знаков для её передачи, хранения, обработки или непосредственного использования.
Связь – процесс передачи сообщения от источника к получателю. Для того чтобы сообщение могло быть передано,необходимо воспользоваться каким-либо переносчиком (транспортировщиком). В качестве такого переносчиком может выступать:
- либо материальный носитель (бумага, магнитная лента, перфокарта и т. д.);
- либо физический процесс (изменяющиеся ток, напряжение, электромагнитные волны и т. д.).
Сигнал – физическая реальность, изменения которой в пространстве и во времени отображают передаваемое сообщение.
Классификация сигналов:
- по способу задания сигнала (детерминированности):
а) регулярные (детерминированные), заданные аналитической функцией;
б) нерегулярные (случайные), принимающие произвольные значения в любой момент времени. Для описания таких сигналов используется аппарат теории вероятностей;
- по форме передаваемых сигналов (в зависимости от функции, описывающей параметры сигнала) (рис. 1):
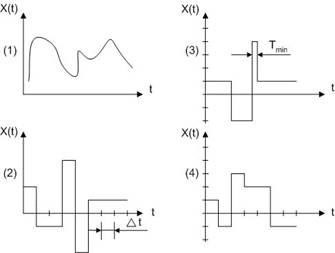
Рис. 1 Классификация по форме передаваемых сигналов
а) непрерывная функция непрерывного аргумента, т.е. х(t) может принимать любое значение в произвольный момент времени – аналоговые сигналы;
б) непрерывная функция дискретного аргумента, т.е. x(t) может принимать любое значение, но в фиксированный момент времени – дискретные сигналы (?);
в) дискретная функция непрерывного аргумента, т.е. x(t) может принимать значения из конечного множества в произвольный момент времени - дискретные сигналы(?);
г) дискретная функция дискретного аргумента, т.е. x(t) принимает значения из конечного множества в фиксированный момент времени – цифровые сигналы;
- по ширине полосы частот:
а) узкополосные  ;
;
б) широкополосные  .
.
Сигналы характеризуется некоторыми параметрами, основные их которых приведены ниже:
- амплитуда A – неотрицательная скалярная величина, размерность которой совпадает с размерностью определяемой физической величины, определяет размах колебаний (изменения величины) по закону, более или менее близкому к гармоническому, а иногда и к колебаниям, вовсе далёким от гармонических;
- спектр (частотный спектр) – (здесь нужно привести какой-нибудь рисунок, на котором показать пример спектра и ширину сигнала)распределение энергии в области частот сигнала (зависимость относительной энергии колебаний от частоты). К понятию частотного спектра тесно относится понятие эффективно передаваемой полосы частот сигнала (ЭППЧ) – это полоса частот, на которой остаточное затухание канала больше затухания на средней частоте не более чем на 1 Нп (8, 68 дБ). ЭППЧ устанавливается экспериментально, исходя из требований качества передачи для конкретного вида сигнала. Часто вместо понятия ЭППЧ употребляют понятие ширины спектра сигнала: ∆F = Fв - Fн;
- длительность T – определённый интервал времени, в пределах которого существует сигнал;
- мощность:
а) максимальная мощность Pmax – это мощность эквивалентного гармонического сигнала с амплитудой Um max, которая превышается мгновенными значениями переменной составляющей первичного сигнала U(t) с определенной, достаточно малой вероятностью ε (ε = 10-2; 10-3; 10-5);
б) средняя мощность. Средняя и максимальная мощности должны быть такими, чтобы при прохождении по каналу передачи не превышались допустимые значения, обеспечивающие неискаженную передачу сигнала;
в) минимальная мощность Pmin – мощность эквивалентная гармоническому сигналу с амплитудой Um min, которая превышается мгновенными значениями составляющих сигнала U(t) с достаточно большой вероятностью, равной (1- ε);
- динамический диапазон D – характеризует возможный разброс мощностей первичного сигнала в конкретной точке канала:
 ;
;
- пик-фактор Q:
 ;
;
- база сигнала: B = T∙F. Необходимо отметить, что между шириной спектра и длительностью сигнала существует обратно пропорциональная зависимость: чем короче спектр, тем больше длительность сигнала. Таким образом, величина базы остается практически неизменной;
- объём – величина, характеризующая количество передаваемой информации в сигнале: V = D∙T∙∆F;
- отношение «сигнал/шум»:  илизащищённость:
илизащищённость:  – понятия, позволяющие охарактеризовать качество передачи сигнала;
– понятия, позволяющие охарактеризовать качество передачи сигнала;
- потенциальный информационный объём – это количество информации, передаваемой в единицу времени:
 ,
,
где η – коэффициент активности источника первичного сигнала (η=1 – для обычного, η=0,25 – для телефонного сигнала).
Электросвязь (telecommunication – телекоммуникация) – процесс передачи сообщения от источника к получателю с помощью электромагнитных сигналов.
Рис. 2 Виды электросвязи
Канал связи – совокупность средств, обеспечивающая передачу сообщения от источника к получателю.
Канал передачи – комплекс (совокупность? Но тут как-то странно тогда получается) технических средств и среды распространения, обеспечивающая передачу сигналов электросвязи, ограниченной в определённой области частот (аналоговых сигналов) или имеющих определённую скорость передачи (цифровых сигналов) в качестве основной характеристики.
Каналы передачи классифицируются:
- по виду передаваемых сигналов:
а) аналоговые;
б) дискретные;
в) цифровые;
- в зависимости от ширины полосы частот, в котором передается сигнал электросвязи:
а) узкополосные;
б) широкополосные;
в) групповые;
- в зависимости от скорости передачи сигналов:
а) низкоскоростные;
б) высокоскоростные;
- по виду среды распространения:
а) проводные, организованные по воздушным линиям связи ВЛС, кабельным линиям КЛС (симметричного и коаксиального кабеля) или волоконно-оптическим линиям ВОЛС;
б) беспроводные (радиоканалы), каналы радиосвязи, организованные по радиорелейным и спутниковым линиям связи; тут как-то нужно обыграть простые радиоканалы и такие системы как Wi-Fi, WiMAX.
- по виду передаваемых первичных сигналов электросвязи или сообщений:
а) телефонные каналы;
б) каналы звукового вещания;
в) телевизионные каналы;
г) телеграфные каналы и каналы передачи данных (ПД);
- по способу организации передачи информации от источника к получателю и обратно:
а) симплексные;
б) полудуплексные;
в) дуплексные;
- по способу организации двусторонней связи:
а) двухпроводный однополосный канал;
б) двухпроводный двухполосный канал;
в) четырёхпроводный однополосный канал;
- по территориальному признаку (по протяжённости):
а) международные;
б) междугородние (магистральные);
в) зоновые (областные);
г) местные.
Система передачи (СП) – совокупность технических средств, обеспечивающая формирование каналов передачи.
Многоканальная система передачи (многоканальная телекоммуникационная система) – комплекс технических средств, обеспечивающий одновременное формирование нескольких каналов передачи по одной линии связи (цепи связи).
Линия связи (ЛС) – это фактически среда распространения сигнала для данной СП. На одной ЛС можно организовать от одного до нескольких каналов передачи.
Цепь связи – совокупность проводов, используемых для передачи одного сигнала электросвязи. Различают одно-, двух-, трёх- и четырёхпроводные цепи. При использовании беспроводных направляющих систем (например, спутниковые и радиорелейные СП) аналогичным понятием является ствол.
Система электросвязи (телекоммуникационная система) – комплекс технических средств, обеспечивающий передачу сигналов электросвязи.
Сеть электросвязи (телекоммуникационная сеть) – совокупность систем электросвязи (телекоммуникационных систем), объединённых по принципам территориального расположения, функционирования и подчинённости. Есть ещё одно неплохое определение сети связи, оно ниже:
Телекоммуникационная сеть – это совокупность сетевых узлов, сетевых станций, оконечных пунктов и соединяющих их линий связи, обеспечивающая доставку сообщения по заданному адресу, с выполнением требований по времени доставки, верности и надёжности. Сетевые узлы располагаются на пересечении магистральных каналах связи, в них располагаются каналообразующее и коммутационное оборудование. В сетевых узлах осуществляется переключение каналов или их групп. Сетевые станции являются оконечными точками для подключения вторичных систем. В оконечных пунктах размещаются оконечное оборудование.
Групповой тракт – это совокупность технических средств, обеспечивающих прохождение группового сигнала. Каналы и групповые тракты, параметры которых нормированы, т.е. характеризуются определенными численными показателями (например, ЭППЧ, скорость передачи) называется типовыми каналами и типовыми групповыми трактами.
Простейшая структурная схема телекоммуникационной системы:
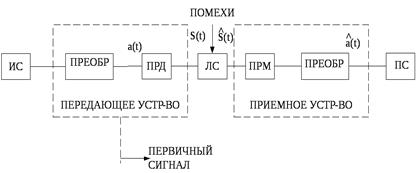
ИС и ПС в с/с могут выступать человек, телеметрия, компьютер и т.д.
Устройство, преобразующее сообщение в сигнал и обратно наз. преобразователем.
Сигнал с выхода преобразователя называют первичным сигналом.
Передатчиком называется спец. устройство, предназначенное для преобразования первичного сигнала в канальный сигнал S(t).
Это необходимо для согласования свойств канального сигнала со свойствами л.с.
Линией связи наз. физ. среда и совокупность аппаратных средств, используемых для передачи сигнала от передатчика к приемнику.
В качестве Л.С. могут выступать эл. кабель, волноводы, волоконный световод, РРЛ, спутниковая система.
ПРМ-обратное преобразование канального сигнала в первичный сигнал.
Т.о. совокупность технических средств, предназначенных для передачи сообщения от источников к потребителю называется телекоммуникационной системой или системой связи.
Классификация с/с:
1.Для передачи речи (телефонные)
2.Для передачи пакетных сообщений (телеграфные)
3.Для передачи неподвижных изображений (факсимильные)
4.Для передачи подвижных изображений (ТВ)
5.Для передачи данных.
Канал – совокупность технических средств, обеспечивающих передачу сигнала от некоторой произвольной точки в другую произвольную точку телекоммуникационной системы.
Для обмена сообщениями между многими абонентами создаются сети связи, обеспечивающие передачу и распределение сообщений по заданным адресам. Распределение потоков сообщений по заданным адресам осуществляется на узлах связи с помощью коммутационных устройств.
Т.о. с/с (или т/сетью) называется система, состоящая из совокупности оконечных (абонентских) устройств, каналов связи
Дата: 2019-05-28, просмотров: 500.