Вентиляторы развились в высоко сложные, управляемые микропроцессором устройства с широким диапазоном операционных характеристик. К сожалению, наша терминология и концептуальные модели, которые мы используем, для понимания работы вентилятора, не успевают сохранять темп технологического развития.
В 1980-х производительность вентилятора диктовалась механической движущей системой. Появление микропроцессора позволило отдельному вентилятору производить любое количество форм кривых, столь же безграничное как воображение оператора. В этой главе представлена схема классификации аппаратов ИВЛ в соответствии с технологией, принятой ведущими членами сообщества пульмональной медицины [Chatburn R. L., Branson R. D., 1992] и большинством авторов зарубежных изданий по искусственной вентиляции легких.
Основные концепции
Вентилятор - это система взаимосвязанных элементов, предназначенных для изменения, передачи и направления прикладной энергии предопределенным образом, чтобы исполнить полезную работу (поддержать или заменить мускулатуру пациента при выполнении акта дыхания). Образ любого вентилятора может быть представлен следующим набором составляющих:
• входящая энергия (вид энергии, используемой при работе вентилятора),
• схема контроля (управления) (включая передачу и преобразование энергии),
• производительность (давление, объем и поток).
Этот простой образ может быть расширен, добавлением множества деталей (таблица 2-1).
Схема контроля (управления)
Чтобы понимать, как механизм может обеспечивать прирост естественной функции дыхания, необходимо понимание механики дыхания. Изучение механики имеет дело с силами, перемещениями и шкалой изменения этих перемещений. В физиологии, сила измерена как давление (давление = сила x площадь), смещение измерено как объем (объем = площадь х смещение), и степень изменения измерена как поток (например, средний поток = изменение объема/изменение времени; мгновенный поток = производная объема относительно времени). Нас интересует давление, необходимое для движения потока газа через дыхательные пути и увеличения объема легких.
Как пример, сложная система органов дыхания может быть представлена простой графической моделью (соломинка, связанная с воздушным шаром). Простая графическая модель аналогична простой электрической цепи, в которых податливость (комплайнс) является аналогичным емкости, сопротивление потоку аналогично электрическому сопротивлению, и давление аналогично уровню напряжения. Подобие физической и электрической моделей позволяет заимствовать математические модели от электрической разработки, заменяя давление, объем и поток, соответственно, напряжением, нагрузкой и током (рисунок 2-1).
Параметры для классификации аппаратов ИВЛ
Таблица 2-1
| Привод (источник энергии) Пневматический Электрический Переменный ток Постоянный ток (батарея) Регуляция потока вдоха и формы кривой потока Внешний компрессор Внутренний компрессор Поршень Электрический двигатель / вращающееся колесо Электрический двигатель / линейный (стойка и шестерня) Пневматическая мембрана (диафрагма) Ограничение переменных Редуцирующий давление клапан Измерительная трубка (типа Thorp) Шаговый двигатель с ножничным клапаном (scissors-valve) Пропорциональный соленоид (клапан) Электромагнитный Прямо соединенный с шаговым двигателем Управляемая шаговым двигателем камера Пропорционально разделенные управляемые клапаны Схема контроля (управления) Контроль контура (циркуляции) Механический Пневматический Жидкостный Электрический Электронный Контроль переменных и форм кривых Давление Объем Поток Время Фазовые переменные Переменная триггера Переменная предельных значений Переменная цикла Переменная базовой линии (baseline) Условные переменные | Работа вентилятора Давление Прямоугольная кривая Экспоненциальная Синусоидальная Осциллирующая (колеблющаяся) Объем Рампообразная Синусоидальная Поток Прямоугольная Рампообразная Восходящая Нисходящая Синусоидальная Эффекты контура пациента Системы тревог Тревоги входящей энергии (питания) Низкая электрическая энергия Низкая пневматическая энергия Тревоги контроля контура Повреждение основных систем (вентилятор неуправляем) Неправильные настройки вентилятора Инверсионное отношение времени вдох/выдох Тревоги выхода Давление Объем Поток Время Высокая и/или низкая частота дыханий вентилятора Высокое и/или низкое время вдоха Высокое и/или низкое время выдоха (апноэ) Вдыхаемый газ Высокая и/или низка температура вдыхаемого газа Высокое и/или низкое содержание О2 |
Результат выражается как уравнение движения для системы органов дыхания (упрощенная версия) [Chatburn R. L., Primiano F. P., Jr, 1988]:
Давление мышц + давление вентилятора
= эластичность х объем + сопротивление х поток
(1)
Давление Мышц + давление вентилятора
= эластическое наполнение + упругое наполнение
(2)
В этом упрощенном варианте давление мышц представляется как трансреспираторное давление (то есть, давление дыхательных путей минус давление поверхности тела), произведенное дыхательными мышцами, чтобы расширить грудную клетку и легкие. Можно сказать, что давление мышц является воображаемым (мнимым), потому что его невозможно непосредственно измерить. Давление вентилятора – это трансреспираторное давление, создаваемое им во время вдоха. Сочетание давления мышц и вентилятора создает объем и поток, доставляемые пациенту. Но усилие мускулатуры пациента увеличивает объем легкого за счет уменьшения давления относительно атмосферного, в то время как вентилятор увеличивает объем легкого, увеличивая давление относительно атмосферного давления. Общее давление – результат усилия пациента, вдыхающего газ в легкие и вентилятора, вдувающего газ в легкие. Давление, объем и поток, изменяются со временем и, следовательно, являются переменными. Эластичность и сопротивление приняты к константе, а их совместный эффект составляет наполнение, производимое вентилятором и дыхательными мышцами. Эластичность (комплайнс, податливость торакопульмональной системы) определена как отношение дыхательного объема к давлению в дыхательных путях (мл/см. вод. ст), а сопротивление (упругость, аэродинамическое сопротивление дыхательных путей и искусственных воздуховодов) определено, как отношение дыхательного объема к давлению за единицу времени (мл/см. вод. ст. /сек). Эластичное наполнение - давление, необходимое для преодоления эластичности (комплайнса) системы органов дыхания, упругое наполнение - давление, необходимое для преодоления сопротивления потоку в дыхательных путях (включая интубационную трубку) наряду с легкими и сопротивлением тканей грудной клетки.
Необходимо обратить внимание, что давление, объем и поток - все измерены относительно их начальных значений (то есть, их значений в конце выдоха). Это означает, что давление вдоха измерено как изменение в давлении дыхательных путей выше РЕЕР. Это причина того, например, что уровни поддержки давления измерены относительно РЕЕР. Объем измеренный как изменение легочного объема выше ФОЕ, и изменение легочного объема в течение дыхательного периода определено как дыхательный объем (ДО). Поток измерен относительно его конечно-экспираторного значения (обычно ноль). Когда давление, объем и поток представлены как функции времени, то для управляемой объемом вентиляции и управляемой давлением вентиляции имеются характерные формы кривых (рисунок 2-2).
Заштрихованные поля показывают давление, вызванное сопротивлением; открытые поля показывают давление, вызванное эластичностью («эластической отдачей»).
Заметьте, что, если дыхательная мускулатура пациента не функционирует, давление мышц равно нулю, и вентилятор должен произвести все давление, необходимое для доставки ДО и создания потока вдоха. Наоборот, если давление вентилятора будет равно нулю (то есть, давление дыхательных путей не нарастает выше нулевой линии во время вдоха) и пациент не дышит, то не имеется никакой вентиляционной поддержки. Между этими двумя крайностями имеется бесконечное разнообразие комбинаций давления, создаваемого дыхательной мускулатурой и поддержки вентилятором, которые являются теоретически возможными для частичной вентиляционной поддержки.
Концепция мышечного давления важна по следующей причине. Имеются много вентиляторов и прикроватных мониторов легочной функции, которые обеспечивают клинициста оценками комплайнса и сопротивления системы органов дыхания, основанных на трансреспираторном давлении системы (то есть, давлении вентилятора), объеме и потоке. Все из них делают вычисления на основе этой версии уравнения движения:
Давление Вентилятора = эластичность х объем + сопротивление х поток (3)
Оно не содержит выражения для давления мышц. Это подразумевает, что любое измерение механики системы органов дыхания имеет смысл при условии, если дыхательные мышцы бездействуют. Если пациент делает дыхательное усилие в течение вспомогательного дыхания, то он добавляет неизмеренное количество движущего давления к давлению, произведенному вентилятором. Таким образом, эластичность и сопротивление, основанные только на измерениях аппаратного датчика давления дыхательных путей, недооценивают истинные значения.
Анализ взаимодействия «вентилятор-пациент» на основе математической модели предполагает надлежащее использование слова «assist»(помогать), которое является другим, часто путаемым понятием. Словарь Вебстера определяет assist как «помогать; оказывать поддержку». Из уравнения движения следует, что всякий раз, когда давление дыхательных путей (то есть, давление вентилятора) повышается выше начального в течение вдоха, вентилятор работает на пациента. Таким образом, дыхание, как считают, является вспомогательным, независимо от других дыхательных характеристик (то есть, классифицируется ли дыхание как спонтанное или принудительное). Важно не путать это значение слова «помогать» с определенными названиями режимов вентиляции (например, ASSIST / CONTROL). Изготовители вентиляторов часто присваивают названия режимам вентиляции без рассмотрения последовательности или теоретической уместности.
В уравнении движения (3), форма любой из трех переменных (то есть, давления, объема или потока, выраженных как функции времени) может быть предопределена, делая это с помощью независимой переменной и двумя другими зависимыми переменными. Этим оперируют вентиляторы. Таким образом, в течение вентиляции управляемой давлением, давление - независимая переменная, и форма кривых объема и потока зависит от формы кривой давления, а также от сопротивления и комплайнса дыхательной системы. Наоборот, в течение поток-контролируемой вентиляции, мы можем определить форму кривой потока. Это делает поток независимой переменной, и форма кривой объема зависит от формы кривой потока. Форма кривой давления зависит от формы кривой потока также как от сопротивления и комплайнса.
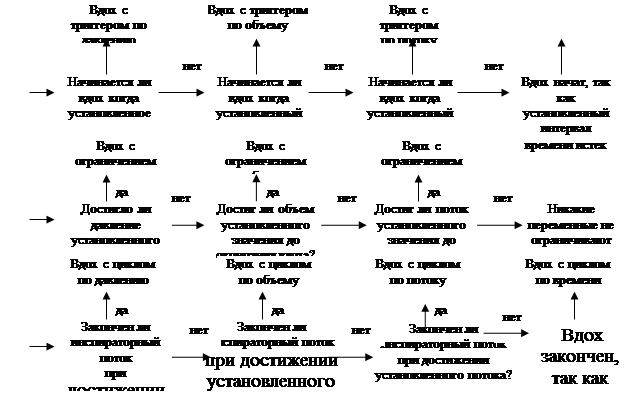
Таким образом, имеется теоретическая основа для классификации вентиляторов контролируемых как по давлению, так и по объему, или потоку. На рисунке 2-3 представлены критерии, для определения переменной контроля (то есть, переменной, которая является независимой).
Если формы кривых для всех трех переменных не предопределены (то есть, ни одна из переменных не может рассматриваться независимо), то вентилятор контролирует только время инспираторной и экспираторной фазы и это называется контролем времени (или по времени). С практической точки зрения, из контролирующих только время, существует несколько типов высокочастотных вентиляторов. Это существенно для понимания и интерпретации у кровати пациента показателей легочной механики (например, сопротивления, комплайнса, константы времени, и т.п.), рассчитываемых многими вентиляторами.
Наиболее существенно, что объясняется уравнением движения, это то, что любой из используемых в настоящее время вентиляторов может непосредственно контролировать только одну переменную одновременно: давление, объем или поток. Поэтому, можно думать, что вентилятор это просто машина, которая контролирует либо кривую давления дыхательных путей, либо кривую объема вдоха, или кривую потока вдоха. Таким образом, давление, объем и поток упомянуты в этом контексте как переменные контроля. Время - это переменная, которая является подразумеваемой в уравнении движения. Как показано в следующих примерах, в некоторых случаях время рассматривается как контролируемая переменная. Эта концепция позволяет нам понимать любой режим, независимо от сложности, просто наблюдая, как контроль переключается от одной переменной к другой.
Сказав, что контролируется, можно исследовать, как это происходит. Вентилятор может управляться двумя различными способами:
1. Установить значения переменных и ждать результата работы вентилятора в течение некоторого периода.
2. Установить значения, наблюдать тенденцию в работе вентилятора и изменять установленные значения соответственно, чтобы достичь желаемого результата.
В обоих случаях изменение установленных значений приводит к изменению результата. В первом случае не имеется никакой информации о произведенной вентилятором работе, чтобы произвести новый цикл дыхания (закрыть петлю). Этот тип схемы контроля называется контролем с открытой петлей (или контролем открытой петли). Во втором случае, информация о проделанной вентилятором работе используется, чтобы изменять заданные значения, что в свою очередь улучшает результат. Эта схема контроля называется контролем с закрытой петлей (или контролем (управлением) с обратной связью). Контроль с обратной связью также называется серво-контролем. Рисунок 2-4 иллюстрирует модели управления с открытой и закрытой петлей.
Чтобы выполнять контроль закрытой петли, результат работы вентилятора должен быть измерен и сравнен с рекомендованными значениями. Эти измерение и сравнение может выполнять человек. Но в современных вентиляторах, преобразователи давления и потока, и электронная схема требуют автоматического контроля закрываемой петли. Контроль закрытой петли обеспечивает преимущество более последовательной работы вентилятора в присутствие непредвиденных изменений (которые могли бы затрагивать давление, объем и поток, включая конденсацию или утечку в контуре циркуляции, обструкцию интубационной трубки, и изменения в сопротивлении системы органов дыхания и комплайнса).
Вентиляторы используют контроль закрываемой петли, чтобы поддерживать последовательно дыхательное давление, кривые объема или потока при изменении значений. Значения, представленные дыхательной системой изменяются часто как результат патологии легких. Проект вентилятора развился от простого контроля открытой петли до двойной закрытой петли или двойному контролю. Эта схема была развита, чтобы получить преимущества и управляемой давлением и управляемой объемом вентиляции. Двойной контроль обеспечивает преимущество контроля давления (то есть, ограничивая пиковое дыхательное давление, по крайней мере, в пределах установленного диапазона, избегать перерастяжения легких), в то же время поддерживая преимущества контроля объема (то есть, доставка постоянного минутного объема, даже если изменяется механика внешнего дыхания).
В настоящее время имеются два основных подхода к двойному контролю. Первый состоит в том, чтобы регулировать (приспосабливать) форму кривой давления между дыханиями. Эта схема была внедрена Siemens с режимом Volume Support (поддержка объемом) на Siemens Servo 300. Вдох – это давление, контролируемое в пределах дыхания, но предел давления автоматически регулируется для достижения заданного целевого дыхательного объема (рисунок 2-5, вверху). Начальный предел давления (то есть, изменение в давлении дыхательных путей выше РЕЕР) установлен автоматически, основанный на расчетном значении для комплайнса системы органов дыхания (также автоматически полученный из теста дыхания):
Начальный предел давления = установленный ДО / комплайнс (4)
Если фактический ДО, основанный на начальном пределе давления, отличается от установленного ДО, предел давления регулируется (выше или ниже, но не больше, чем на 3 см H2O) для близкого соответствия установленному ДО. Этот процесс повторяется более чем несколько дыхательных циклов, пока доставленный ДО не равняется установленному. Подобный подход используется в режиме PRVC (контроль объема, регулируемый давлением) на Siemens 300.
Другой основной подход состоит в том, чтобы внести изменения в пределах дыхания, чтобы достичь заданного объема. Это демонстрируется в режиме PRESSURE AUGMENT (нарастающего давления) на Bear 1000 и VAPS (объем обеспеченный поддержкой давлением) на Bird 8400 Sti или Tbird. Здесь, вентилятор может переключаться между контролем давления и контролем потока в пределах цикла дыхания в зависимости от того, был ли выполнен заданный ДО (рисунок 2-5, внизу).
Вариация этого подхода иллюстрирована особенностью Pmax на Drager Evita 4, в котором вентилятор начинает вдох с контролем потока в установленном пределе. Когда давление дыхательных путей достигает установленного значения Pmax, вентилятор включает контроль давления в пределе заданного, в то время как ДО уже проверен. Вентилятор пытается увеличивать время потока вдоха (то есть, период от начала до конца инспираторного потока) пока доставляется ДО, при условии, что установленного времени вдоха (то есть, период от начала инспираторного потока до начала экспираторного потока) достаточно. Если установленный ДО не доставлен в установленное время вдоха, то активизируется тревога.
Переменные фаз
W. Mushin с коллегами предложил, что время дыхательного цикла охватывает четыре разделенные фазы:
(1) изменения от выдоха до вдоха,
(2) фаза вдоха,
(3) изменения от вдоха до выдоха,
(4) фаза выдоха.

|
Рис.2-6. Критерии для определения фазовых переменных во время ИВЛ.
Базовая линия (baseline)
Переменная, которая контролируется в течение времени выдоха, это базовая линия. Экспираторное время определено как временной интервал от начала потока выдоха до начала потока вдоха. Как и со временем вдоха, полезно отличать компоненты времени выдоха: время потока выдоха, определенное как интервал от начала потока выдоха до его окончания, и время паузы выдоха (экспираторной паузы), определенное как интервал между окончанием потока выдоха и началом потока вдоха. Экспираторная пауза часто введена, чтобы измерить autoРЕЕР.
Необходимо помнить, что в уравнении движения, давление, объем и поток измерены относительно давления в конце выдоха или начальных значений и, таким образом, первоначально являются нулем. Хотя начальное значение любой из этих переменных теоретически будет контролироваться, контроль давления наиболее практичный и осуществляется обычно всеми используемыми вентиляторами.
Условные переменные
Для каждого дыхания, вентилятор создает определенную структуру контроля и фазовых переменных (рисунок 2-7). Вентилятор может сохранять этот образец (паттерн) постоянным для каждого дыхания, или может вводить другие (например, один для принудительного и один для спонтанного дыханий). В сущности, вентилятор должен решить какую структуру контроля осуществить и какие фазовые переменные использовать перед каждым дыханием, в зависимости от значения некоторых заданных условных переменных. Об условных переменных можно думать как введении условной логики в форме инструкций «если – тогда». То есть, если значение условной переменной достигает некоторого заданного порога, то некоторое действие происходит, чтобы изменить структуру вентиляции. В данном контексте давление, объем и поток в момент их измерения вентилятором являются фазовыми переменными, но они же являются условными переменными, когда их значения устанавливаются клиницистом на пользовательском интерфейсе вентилятора.
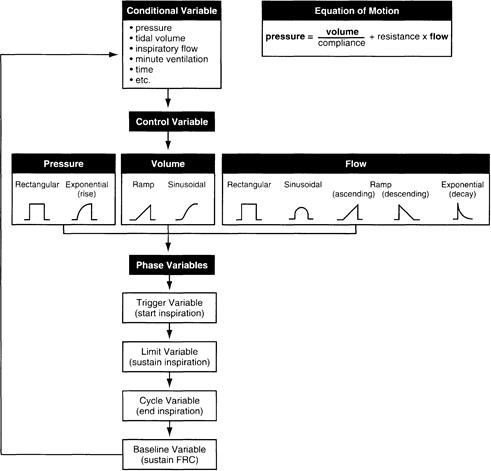
Рис.2-7. Принцип управления вентилятором. Эта модель показывает, что во время вдоха, вентилятор способен контролировать только одну переменную во времени (т.е., давление, объем или поток).
Простым примером является NPB MA 1 в режиме контроля. Каждое дыхание вызвано триггером времени, поток ограничен и объем цикличен. Триггер, предел и переменные цикла имеют заданные значения (например, триггер частоты = 20 циклов/мин, предел потока вдоха до 60 л/мин, и циклический дыхательный объем = 750 мл). Однако, каждые несколько минут будет вводиться вздох, который отличается от установленных фазовых переменных (например, триггер частоты = 2 вздоха каждые 15 минут с дыхательным объемом = 1500 мл). Как вентилятор делает это? Концептуально, мы можем говорить, что перед каждым дыханием выбирается образец, вентилятор проверяет значение некоторой условной переменной, чтобы определить, достигло ли это заданного порогового значения. Если пороговое значение достигнуто, то выбирается один образец, если нет, то другой. В случае с NPB MA-1, условной переменной было бы время: если заданный интервал времени истек (то есть, интервал вздоха), то вентилятор отключается от образца вздоха.
Другой пример, это переключение между вызванными пациентом и вызванными машиной дыханиями в режимах SIMV и MMV.
До настоящего момента термины принудительные и непосредственные использовались без объяснения. Клиницисты интуитивно понимают значения этих терминов. Но в связи с тем, что они играют центральную роль в определении и понимании режимов вентиляции, должны быть обеспечены формальные определения. Спонтанные (непосредственные) дыхания – это те, которые начаты и закончены пациентом. То есть пациент вызывает дыхание и участвует в цикле дыхания. Если вентилятор определяет начало или конец вдоха, то дыхание рассматривается как принудительное. Дыхание, вызванное триггером времени, всегда рассматривается как принудительное дыхание. Дыхание, вызванное пациентом, но при этом время или объем цикличны (то есть, пациент не играет роль в критериях цикла), также является принудительным дыханием.
Обозначение типов дыхания очень важно для понимания режимов вентилятора. Существующая система классификации требует, чтобы дыхание просто различали только как принудительное или спонтанное. Конференция экспертов (которая точно не достигла согласия) полагала, что четыре типа дыхания были необходимы для описания. Группа консенсуса [Consensus statement on the essentials of mechanical ventilators, 1992] добавила термины вспомогательное (assisted) дыхание и поддерживаемое (supported) дыхание. Вспомогательное дыхание это принудительное дыхание, которое вызвано пациентом. Поддерживаемое дыхание это спонтанное дыхание, которое имеет давление вдоха большее, чем начальное давление. Тем не менее, предпочтительнее думать о вспомогательном дыхании как типе принудительного дыхания и о поддерживаемом как типе спонтанного дыхания. Таблица 1-2 описывает различия между этими дыханиями.
Сравнение типов дыхания
Таблица 1-2.
| ТИП ДЫХАНИЯ | ТРИГГЕР | ПРЕДЕЛ | ЦИКЛ |
| Принудительное | Вентилятор (время) | Вентилятор (давление или поток) | Вентилятор (время, поток, объем) |
| Вспомогательное | Пациент (давление, поток, объем, сопротивление, движение) | Вентилятор (давление или поток) | Вентилятор (время, поток, объем) |
| Спонтанное | Пациент (давление, поток, объем, сопротивление, движение) | Вентилятор (давление или поток) Давление вдоха = давлению baseline | Пациент |
| Поддерживаемое | Пациент (давление, поток, объем, сопротивление, движение) | Вентилятор (давление или поток) Давление вдоха > давления baseline | Пациент |
Хотя два новых типа дыхания различны клинически (дыхание, вызванное триггером времени, существенно отличается от дыхания, вызванного пациентом), в техническом аспекте они не отличаются.
Рисунок 2-8 иллюстрирует эти определения в алгоритме. Обратите внимание, что если вентилятор находится в цикле дыхания по времени или объему, то дыхание рассматривается как принудительное, потому что закончено вентилятором. Однако, если вентилятор подает поток после активации вдоха пациентом, как в режиме поддержки давлением, дыхание будет рассматриваться спонтанным (поддерживаемым).
Следовательно, во время режима поддержки давлением, вентилятор пытается соответствовать дыхательному требованию пациента, и это действительно пациент заканчивает дыхание, которое считается спонтанным.
Общие характеристики для режимов вентиляции
Таким образом, режим вентиляции представляет набор характеристик дыхания (переменных контроля, фазовых переменных и условных переменных), которые являются важными для клинициста. Иногда мы должны передать только наиболее общую информацию. Иногда, характер взаимодействия пациент/вентилятор должен быть определен весьма точно. Система классификации должна обеспечивать эту гибкость. Практический способ сделать это может состоять в том, чтобы основать систему классификации на образце принудительных дыханий. При этом образец должен определять следующий минимальный набор характеристик:
1 - переменная контроля (то есть, давление, объем или двойной контроль);
2 - образец принудительных версий спонтанных дыханий (то есть, CMV, SIMV и РSV);
3 - фазовые переменные для принудительных дыханий, в частности триггер и переменные цикла;
4 – имеется ли поддержка спонтанных дыханий;
5 - условные переменные.
Наиболее подходящий путь описания режима это сформулировать переменную контроля и образец, как в управляемой по давлению перемежающейся принудительной вентиляции (PC - IMV). Это говорит нам, что и принудительные и непосредственные дыхания допустимы, и что давление предопределено для принудительных дыханий. Если необходимо большее количество деталей, мы можем сказать, что принудительные дыхания являются вызванными или пациентом или триггером времени (циклом). Следующая деталь может включать факт, что спонтанные дыхания поддерживаются давлением. Наконец, мы можем добавить, что условные переменные определяют, что непосредственные дыхательные усилия могут вызывать принудительное дыхание только в пределах специфического окна триггера, как определено установленной принудительной частотой дыхания.
Эта система может применяться и к более сложным схемам контроля вентилятора. Например, на Siemens Servo 300, мы можем устанавливать режим, называемый «Поддержка Объемом». Переведя, этот способ становится «двойной управляемой непрерывной спонтанной вентиляцией». Можно добавить, что каждое дыхание вызвано триггером давления или потока, при этом давление ограничено и цикл контролируется по потоку, и что условная логика регулирует предел давления между дыханиями в попытке достичь установленного дыхательного объема.
Теперь, необходимо обратить внимание на три факта:
(1) имеется логический способ объяснить работу вентилятора и с дополнением деталей выполнить любые необходимые связи;
(2) существует большое число возможных режимов;
(3), если Вы используете в работе несколько марок вентиляторов, Вы можете заблуждаться в руководствах оператора, если не имеете хорошего общего теоретического понимания, независимого от их терминологии.
Дата: 2019-05-28, просмотров: 383.