Тип и назначение: однопалубное, одновинтовое сухогрузное судно имеющее три грузовых трюма, двойное дно и двойные борта, предназначено для перевозки насыпных, генеральных грузов, контейнеров и леса. Класс Регистра КМ ЛУ 2 I А1, район плавания - неограниченный.
Эксплуатационная скорость:в грузу – 9,0уз,в балласте – 10,5уз.
Длина наибольшая, м 122,4
Длина между перпендикулярами, м 120
Ширина, м 16,6
Высота борта до верхней палубы, м 6,7
Высота борта до нижней палубы, м 18,72
Осадка по ЛГМ, м 4,86
Водоизмещение при осадке по ЛГМ, т 8675
Дедвейт, т 6300
Чистая грузоподъемность, т 2360
Инерционные и манёвренные характеристики судна приведены в таблицах 1.1 и 1.2, а также на рисунках 1.1 и 1.2.
Таблица 1.1 – Инерционные характеристики судна
| Вид манёвра | В балласте | В грузу | ||
| Время, мин. | Расстояние, кб. | Время, мин. | Расстояние, кб. | |
| 1 | 2 | 3 | 4 | 5 |
| ППХ – СТОП | 11 | 7 | 13 | 8 |
| ПСХ – СТОП | 10 | 6,5 | 12 | 7,5 |
| ПМХ – СТОП | 8 | 5 | 9 | 7 |
| ПСМХ – СТОП | 7 | 4 | 8 | 6 |
| ППХ – ЗПХ | 5 | 3 | 7 | 3 |
| ПСХ – ЗПХ | 3 | 2,2 | 5 | 2 |
| ПМХ – ЗПХ | 2 | 1,2 | 4 | 1 |
| ПСМХ – ЗПХ | 1 | 1 | 2 | 0,5 |
| СТОП – ППХ | 11 | 9,8 | 16 | 14 |
Таблица 1.2 – Маневренные характеристики судна
| Время циркуляции | |||||
В балласте
В грузу
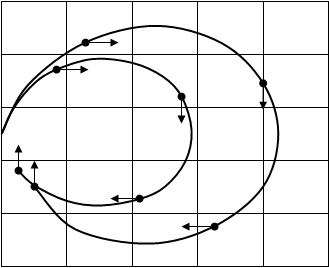 |
Рисунок 1.1 - Циркуляция судна в балласте
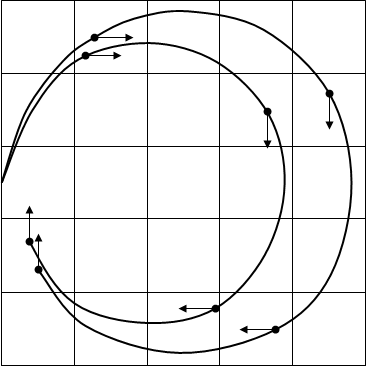 |
Рисунок 1.2 - Циркуляция судна в грузу
Навигационное оборудование
Таблица 1.3 – Технические средства навигации
| Прибор, система | Тип, марка | К-во | Год выпуска | Место установки |
| 1 | 2 | 3 | 4 | 5 |
| Магнитный компас (основной) | «Кмо-т» | 1 | 1978 | пеленгаторная палуба |
| Магнитный компас (путевой) | «Кмо-т» | 1 | 1976 | ходовой мостик |
| Гирокомпас | «Вега» | 1 | 1976 | гирокомпасный пост |
| Радиолокатор (основной) | «Печора» | 1 | 1979 | ходовой мостик |
| Радиолокатор резервный | «Миус» | 1 | 1981 | ходовой мостик |
| Радиопеленгатор | «Рыбка М» | 1 | 1976 | ходовой мостик |
| Приемоиндикатор РНС «Лоран С» | КПИ-5ф | 1 | 1987 | ходовой мостик |
| Гидродинамический лаг | «МГЛ-25 М» | 1 | 1977 | ходовой мостик |
| Навигационный эхолот | НЭЛ – 5М | 1 | 1979 | ходовой мостик |
| Авторулевой | «Аист» | 1 | 1979 | ходовой мостик |
| Спутниковая навигационная система “GPS-ГЛОНАСС” | CН-3102 | 1 | 1987 | ходовой мостик |
Таблица 1.4 – Девиация магнитного компаса КМО-Т на т/х Буг (в грузу)
| ККо | dо | ККо | dо |
| 0 | 0,0 | 180 | -0,8 |
| 15 | +0,9 | 195 | -0,1 |
| 30 | +1,8 | 210 | +0,8 |
| 45 | +2,2 | 225 | +1,2 |
| 60 | +2,2 | 240 | +1,4 |
| 75 | +2,0 | 255 | +1,2 |
| 90 | +1,3 | 270 | +0,7 |
| 105 | +0,6 | 285 | -0,2 |
| 120 | -0,2 | 300 | -1,6 |
| 135 | -0,5 | 315 | -1,5 |
| 150 | -0,8 | 330 | -1,5 |
| 165 | -0,8 | 345 | -1,4 |
| 180 | -0,8 | 360 | 0,0 |
Коэфициенты: А=+0,3о, В=+0,3о, С=+0,4 о, D=+0,35 о, Е=+0,67о.
Таблица 1.5 – Радиодевиация радиопеленгатора «Рыбка – М»
| ОРКУо | fо | ОРКУо | fо |
| 0 | -0,8 | 180 | -0,6 |
| 10 | -0,2 | 190 | 0,0 |
| 20 | +0,2 | 200 | +0,1 |
| 30 | +0,4 | 210 | +0,6 |
| 40 | +0,7 | 220 | +0,8 |
| 50 | +0,8 | 230 | +0,6 |
| 60 | +0,6 | 240 | +0,5 |
| 70 | +0,3 | 250 | +0,4 |
| 80 | +0,1 | 260 | 0,0 |
| 90 | -0,2 | 270 | -0,5 |
| 100 | -0,6 | 280 | -0,8 |
| 110 | -0,8 | 290 | -1,0 |
| 120 | -1,0 | 300 | -1,1 |
| 130 | -1,1 | 310 | -1,2 |
| 140 | -1,1 | 320 | -1,2 |
| 150 | -1,0 | 330 | -1,0 |
| 160 | -0,4 | 340 | -0,9 |
| 170 | -0,5 | 350 | -0,7 |
| 180 | -0,6 | 360 | -0,8 |
Коэфициенти: A= +0,4º D= +0,9º E= +2,3º B= +1,0º C= - 0,9º λ=410 кГц
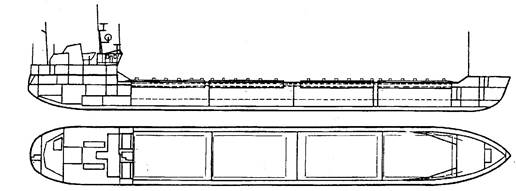
Рисунок 1.3 - План - схема судна типа "Буг"
Дата: 2019-05-28, просмотров: 663.