При создании современной радиоэлектронной аппаратуры используются три основные подхода к реализации дискретных устройств (ДУ): аппаратный, программный и аппаратно-программный. При аппаратном получают ДУ с традиционной «жесткой» логикой, что обеспечивает наибольшее быстродействие устройств, но требует трудоемкой разработки индивидуальной структуры ДУ.
При программном ДУ реализуется в виде программы для готовой универсальной ЭВМ, в качестве которой можно использовать микроЭВМ, предназначенную для встраивания непосредственно в разрабатываемые блоки.
Аппаратно-программный подход предполагает разработку как программных, так и аппаратных средств. Сюда относится реализация ДУ в виде автомата с микропрограммным управлением и хранимой в ПЗУ программой, а также построение ДУ на основе микропроцессора (МП). Этот вариант открывает широкие возможности для применения современных БИС и позволяет в наибольшей степени согласовать разрабатываемые аппаратно-программные средства с особенностями решаемых задач.
Микропроцессор представляет собой функционально законченное цифровое устройство, выполненное в виде одной или нескольких БИС и предназначенное для выполнения операций по обработке информации и управлению в соответствии с хранимой в памяти программой. Необходимо отметить, что термин «микропроцессор», несмотря на широкое распространение, не имеет строгого определения. Это обусловлено прежде всего наличием большого числа сильно различающихся между собой типов МП, а также их постоянным развитием.
В узком смысле МП совпадает с центральным процессорным элементом (ЦПЭ) вычислительного устройства, выполненным на основе БИС. ЦПЭ обычно используется в качестве основного элемента микропроцессорного вычислительного устройства МПВУ, схема которого представлена на рис. 10.
МПВУ минимальной конфигурации содержит ЦПЭ, блоки ПЗУ и ОЗУ, генератор тактовых импульсов ГТИ и блок интерфейса (ИФ), через который осуществляется связь с внешними устройствами (ВУ). Будем считать, что МПВУ, представляющее собой специализированное вычислительное устройство, используется в аппаратуре для выполнения некоторого заданного алгоритма обработки информации (или совокупности алгоритмов).
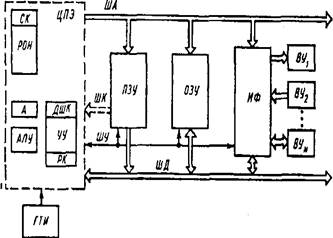
Рисунок 10. Обобщенная структурная схема микропроцессорного вычислительного устройства
Поэтому основная программа работы МПВУ записывается в ПЗУ, которое служит также для хранения различных подпрограмм, констант, таблиц и других данных, известных уже на этапе проектирования устройства. ОЗУ используется для хранения данных, поступивших из ВУ или подготовленных для выдачи в ВУ, а также промежуточных результатов вычислений и некоторой адресной информации.
Блок ГТИ, выполняемый, как правило, на основе кварцевого генератора, предназначен для выработки серий тактовых кварцевого генератора, предназначен для выработки серий тактовых импульсов и некоторых вспомогательных сигналов, необходимых для работы ЦПЭ и синхронизации других блоков системы.
Интерфейс представляет собой совокупность шин для передачи информации, электронных схем, специальных сигналов и алгоритмов, управляющих обменом информации. Блок интерфейса служит для сопряжения сигналов МПВУ и ВУ по временным и электрическим параметрам, а также в необходимых случаях для преобразования данных и управления обменом.
К основным узлам ЦПЭ относятся: управляющее устройство (УУ) с регистром команд (РК) и дешифратором команд (ДШК); арифметико-логическое устройство (АЛУ) с аккумулятором (А), который является основным рабочим регистром; блок регистров общего назначения (РОН) со счетчиком команд (СК).
Связь между блоками МПВУ осуществляется с помощью ряда шин: шины адреса (ША), шины данных (ШД), шины управления (ШУ), шины команд (ШК).
Возможны различные варианты организации шин: используется одна двунаправленная шина данных, либо две одно направленные (одна из которых является входной для ЦПЭ, а другая – выходной), шина команд может совмещаться с шиной данных при обеспечении временного разделения сигналов и т.д.
Обобщенно процесс выполнения команды в МПВУ можно разбить на две фазы: фазу выборки кода команды и фазу ее исполнения. Фаза выборки состоит из трех шагов: сначала адрес команды из СК выставляется на ША, затем происходит выборка кода команды из ПЗУ и передача его через ШК или ШД в регистр команд ЦПЭ, после чего производится дешифрация этого кода в ДШК.
В соответствии с кодом команды УУ начинает вырабатывать последовательность управляющих сигналов, необходимых для ее выполнения. Фаза выполнения команды начинается с подготовки операндов (т.е. обрабатываемых данных), которая заключается в определении местоположения операндов и их размещении в требуемых узлах, после чего ЦПЭ переходит к выполнению операции, заданной кодом команды. В это время в СК формируется адрес следующей команды и вся описанная последовательность работы МПВУ повторяется. Более детально процесс работы МПВУ рассматривается при изучении конкретных серий микропроцессоров.
В зависимости от требований реального применения МПВУ в минимальную конфигурацию системы могут быть введены: контроллер приоритетных прерываний (КПП); контроллер прямого доступа к памяти (КПДП); программируемый параллельный адаптер (интерфейс) ППА); программно-управляемый связной интерфейс (ПСИ); программируемый таймер (ПТ), и т.п.
Блок КПП способствует организации работы МПВУ в реальном времени тем, что дает возможность осуществить временное ВУ, вызвавшего прерывание. Блок КПДП позволяет ускорить обмен массивами данных между ВУ и ЗУ за счет исключения ЦПЭ из цепи передачи информации. Блоки ППИ и ПСИ позволяют организовать обмен между ЦПЭ и В У информацией, представляемой соответственно в параллельном и последовательном кодах. Блок ПТ служит для выработки временных задержек программируемой длительности и меток времени, что способствует организации работы МПВУ в реальном времени.
Для реализации этих блоков во многих микропроцессорных комплектах БИС предусмотрены соответствующие интегральные схемы. Кроме перечисленных типовых блоков в МПВУ могут вводиться нестандартные блоки, специально разработанные для решения конкретных задач.
Выводы
В процессе выполнения курсовой работы мы ознакомились с ссновными понятиями и принципами микропрограммного управления; концепцией управляющего и операционного автоматов; управляющими автоматами с жесткой и программируемой логикой; научились строить графы схем алгоритмов; проводить синтез управляющего автомата по граф-схеме алгоритма; строить УА с программируемой логикой на основе ПЗУ и общей структурой микропроцессорного вычислительного устройства.
Литература
1. Самофалов К.Г., Романкевич А.М., и др. Прикладная теория цифровых автоматов. – Киев. «Вища школа» 1987.
2. Соловьев Г.Н. Арифметические устройства ЭВМ. – М. «Энергия». 1978.
3. Савельев А.Я. Прикладная теория цифровых автоматов – М. «Высшая школа». 1987.
4. Каган Б.М. Электронные вычислительные машины и системы. – М. Энергоатомиздат. 1985.
5. Лысиков Б.Г. Арифметические и логические основы цифровых автоматов. – Минск. «Вышэйшая школа». 1980.
Дата: 2019-05-28, просмотров: 343.