Объем оборудования УА зависит от сложности реализуемого алгоритма и от структуры этого автомата, которую можно выполнить в трех вариантах.
1. УА с жесткой (схемной, произвольной) логикой, при которой переключательные функции, необходимые для формирования заданной последовательности управляющих сигналов У, реализуются с помощью логических элементов с произвольными связями (обычно с применением схем с малой и средней степенями интеграции). Здесь используется аппаратный подход к реализации устройства.
2. УА с хранимой в памяти (гибкой, программной) логикой, при которой сигналы У вырабатываются на основе совокупности управляющих слов, хранимых в памяти автомата. В этом случае составленные микропрограммы используются в явной форме и обычно записываются в постоянные запоминающие устройства (ПЗУ), выполненные на основе полупроводниковых БИС большой емкости, что позволяет обеспечить регулярность структуры УА и его компактность; здесь используется аппаратно-программный подход к реализации устройства.
3. УА на основе программируемых логических матриц (ПЛМ), в которых заданные функции реализуются с помощью БИС ПЛМ, что позволяет сочетать многие достоинства первых двух вариантов.
Таким образом, использование принципа микропрограммного управления позволяет упорядочить и упростить процедуру логического проектирования ДУ, обеспечить регулярность их структуры, а также открывает возможность широкого применения современных БИС. Принцип микропрограммирования применяется при создании микропроцессоров и устройств на их основе. Это не только позволяет упорядочить управление, но и дает возможность формировать систему команд микропроцессоров по своему усмотрению, исходя из имеющейся системы микрокоманд.
Рассмотрим порядок проектирования микропрограммного ДУ, который состоит из следующих основных этапов:
Запись алгоритма.
По описанию отдельных алгоритмов, реализуемых устройством, составляется их формализованная запись в виде граф-схем алгоритмов (ГСА). Для этого составляется список необходимых микроопераций Уj, и соответствующих им управляющих сигналов уj, а также логических условий хi; Далее при необходимости производится минимизация числа вершин ГСА и составляется объединенный ГСА, являющийся формой здания ДУ для выполнения следующих этапов.
Построение ОА.
В общем случае ОА может быть построен по канонической схеме автомата и содержит три основные части: блок элементов памяти для хранения операндов, а также промежуточных и конечных результатов; комбинационную схему, реализующую набор микроопераций; комбинационную схему, вырабатывающую значения логических условий. Как уже отмечалось, при построении ОА целесообразно применять типовые узлы, а также стремиться использовать отдельные узлы для выполнения нескольких микроопераций.
Построение УА.
Сначала выбирают вариант структуры УА, учитывая требования быстродействия, допустимый объем аппаратуры и другие ограничения. Далее осуществляется синтез УА в соответствии с процедурой, зависящей от принятой структуры автомата.
В результате выполнения этих этапов составляют структурные схемы ОА и УА и переходят к техническому проектированию, которое включает вопросы практической реализации схемы устройства на выбранной элементной базе, введение необходимых развязывающих, усиливающих и формирующих каскадов, компоновку деталей на платах, составление монтажных схем и выдачу технической документации.
Граф-схемы алгоритмов
ГСА – это ориентированный связный граф, задающий последовательность выполнения операций данного алгоритма и содержащий ряд операторных и условных вершин, а также одну начальную и одну конечную вершины. Операторной называется вершина, – которой сопоставляется одна или несколько микроопераций и отмечается соответствующими управляющими сигналами У, а условной – вершина, которой сопоставляется некоторое логическое условие X.
Любая вершина ГСА, кроме вершины «Начало», имеет по одному входу. Вершина «Начало» входов не имеет. Вершина «Начало» и любая операторная вершина имеют по одному выходу. Вершина «Конец» выходов не имеет. Любая условная вершина имеет два выхода, помечаемых символами «Да» и «Нет»: Вместо этих символов могут быть использованы цифры «1» и «О» соответственно. Изображение вершин «Начало», «Конец», операторной вершины и условной вершины ГСА представлено на рис. 2.
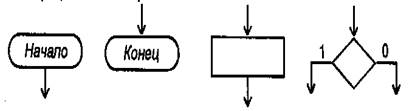
Рисунок 2-Графы схемы алгоритмов
ГСА составляют так, чтобы обеспечить выполнение необходимых операций и проверку логических условий в соответствии со словесным описанием алгоритма.
На основании перечня микроопераций и реализующих их функциональных узлов составляется структурная схема ОА. Здесь широкими стрелками показаны шины, по которым передается информация, а тонкими – сигналы у, управляющие работой отдельных узлов или передачей информации по шинам.
ГСА должна удовлетворять следующим условиям:
1. Входы и выходы вершин соединяются друг с другом с помощью направленных всегда от выхода к входу.
2. Каждый выход соединен только с одним входом.
3. Любой вход соединяется, по крайней мере, с одним выходом.
4. Любая вершина ГСА лежит, по крайней мере, на одном пути из вершины «Начало» в вершину «Конец».
5. Один из выходов условной вершины может соединяться с ее входом, что недопустимо для операторной вершины. Такие условные вершины иногда называются возвратными.
6. В каждой условной вершине записывается логическое условие из множества логических условий. Разрешается в различных условных вершинах записывать одинаковые логические условия.
7. В каждой операторной вершине записывается оператор, представляющий собой выходной сигнал или совокупность выходных сигналов управляющего автомата. Разрешается в различных операторных вершинах записывать одинаковые операторы.
Дата: 2019-05-28, просмотров: 388.