Два неидентичных осцилляторов, которые, взятые по отдельности, имеют различные периоды, при наличии связи подстраивают свои ритмы и начинают демонстрировать колебания с общим периодом. Это явление часто и называют в терминах совпадения частот их захватом. Произойдет это или нет, т. е. синхронизуются ли они, зависит от двух факторов:
1. Сила связи. Этот параметр характеризует, насколько слабо или сильно взаимодействие;
2. Расстройка по частоте. Расстройка частот Δf=f1– f2 характеризует, насколько различны осцилляторы. Представим себе следующий эксперимент. Пусть собственные частоты двух невзаимодействующих осцилляторов f1 и f2. Свяжем осцилляторы и измерим частоты F1 и F2 связанных систем. Мы можем выполнить такие измерения для различных параметров расстройки и получить зависимость ΔF=F1–F2 от Δf [1] (pис. 2).
Эта зависимость типична для взаимодействующих автоколебательных систем, независимо от их природы (механической, химической, электронной, и т. д.). Анализ показывает, что, если рассогласованность автономных систем не слишком велика, то частоты двух систем становятся равными, или захваченными, т. е. наступает синхронизация. В общем случае ширина области синхронизации возрастает с увеличением силы связи [3].
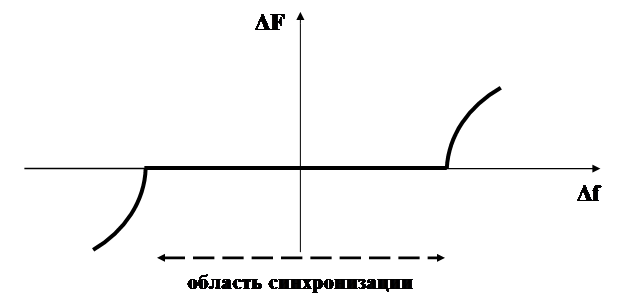
Рис. 2. График «разность наблюдаемых частот - расстройка» для некоторой фиксированной силы связи. Разность частот ΔF двух связанных осцилляторов изображена как функция расстройки Δf несвязанных систем. В определенном диапазоне расстроек частоты связанных осцилляторов идентичны (ΔF=0), что указывает на синхронизацию.
Более детальное рассмотрение синхронных состояний показывает, что синхронизация двух автоколебательных систем может возникнуть в двух формах. Чтобы описать эти режимы, введем ключевое понятие теории синхронизации, а именно понятие фазы осциллятора [1]. Фаза понимается как величина, пропорциональная доле периода и возрастающая на 2π в течение одного цикла колебаний. Фаза однозначно определяет положение периодического осциллятора. Как и время, она параметризует сигнал внутри одного цикла.
φ(t) = φo + 2π  (2)
(2)
Рассмотрим разность фаз двух автоколебательных систем. Если в результате синхронизации разность фаз φ1–φ2 близка к нулю, то такой режим называется синфазной синхронизацией. Если взглянуть на колебания осцилляторов с большой точностью, то можно выявить, что эти колебания не в точности совпадают, так что обычно говорят о фазовом сдвиге между двумя колебаниями. Этот фазовый сдвиг может быть очень мал, но он всегда присутствует, если две системы изначально имели разные периоды, или же разные частоты.
Если разность фаз синхронизованных осцилляторов близка к π, то говорят о синхронизации в противофазе.
Возникновение определенного соотношения между фазами двух синхронизованных автоколебательных систем часто называют захват фаз. Т. о. можно сформулировать основной признак синхронизации: будучи связанными, два осциллятора с изначально различными частотами и независимыми фазами подстраивают свои ритмы и начинают осциллировать на общей частоте [3]. Это также предполагает наличие определенного соотношения между фазами двух систем. Так, говорят, что фазы φ1 и φ2 захвачены в отношении n : m, если выполняется неравенство:
|nφ1 – mφ2| < constant (3)
Подводя итоги, можно сказать, что если в каком-либо эксперименте мы наблюдаем две переменные, которые кажутся изменяющимися синхронно, то это не обязательно означает, что мы наблюдаем синхронизацию. Чтобы назвать явление синхронизацией, мы должны быть уверены в том, что:
· мы анализируем поведение автоколебательных систем,
т.е. систем, способных генерировать собственные ритмы;
· системы подстраивают свои ритмы за счет слабого взаимодействия;
· подстройка ритмов происходит в некотором диапазоне расстроек между системами; в частности, если частота одного из
осцилляторов медленно изменяется, то вторая система следует
за этим изменением.
Соответственно, одного наблюдения недостаточно, чтобы сделать вывод о наличии синхронизации. Синхронизация — это слож ный динамический процесс, а не состояние [1].
Дата: 2019-05-28, просмотров: 318.