При питании асинхронного двигателя от преобразователя частоты в процессе преобразования напряжения промышленной частоты в напряжение регулируемой амплитуды и регулируемой частоты возникают потери напряжения и мощности в преобразователе. Обычно такие преобразователи имеют внутренние обратные связи, и при изменении нагрузки двигателя выходное напряжение и частота практически не изменяются. Поэтому в дальнейшем напряжение и частоту на статоре двигателя будем считать независящими от нагрузки.
Синхронная скорость двигателя ω0 зависит от частоты питающей сети f1 и числа пар полюсов рn:
Для устойчивой работы двигателя необходимо при изменении частоты поддерживать перегрузочную способность двигателя, что обеспечивается регулированием напряжения на статоре по различным законам в зависимости от частоты и от характера изменения статического момента. Эти особенности необходимо учитывать при расчете частоты и амплитуды напряжения.
Частота напряжения в заданной точке:

Расчет частоты и тока статора двигателя в системе источник тока – асинхронный двигатель (ИТ-АД)
При работе двигателя в режиме частых пусков и торможений большое значение имеют условия формирования пусковых и тормозных моментов. Механические характеристики асинхронного двигателя при питании от преобразователя частоты, работающего в режиме автономного источника напряжения, существенно снижают критический момент в зоне малых частот. Здесь существенно влияет активное сопротивление обмотки фазы статора r1. Для увеличения момента в зоне малых частот приходится повышать напряжение на статоре.
При питании статора двигателя от источника тока величина тока статора не зависит от нагрузки двигателя, а определяется лишь управляющим воздействием. Для предварительного расчета принимают Мкт =(2…3)Мзад, обеспечивая этим перегрузочную способность двигателя, и определяют величину тока статора
Механические характеристики строят по формуле
где
 ;
;
Характеристика M=f(S) приведена на рисунке 8.
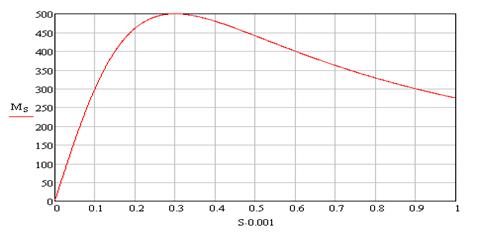
Рисунок 8 – Характеристика M=f(S) асинхронного двигателя
Механическая характеристика двигателя строится по 4 основным точкам (см. рисунок 9).
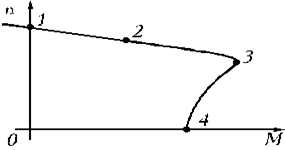
Рисунок 9 – Основные точки механической характеристики двигателя
Точка 1: n0 = (60 f) / p, Точка 2 с координатами nн и Мн. Номинальная частота вращения nн задается в паспорте. Номинальный момент рассчитывается по формуле:
Точка 3 с координатами Мкр nкр. nкр = n0 (1 - Sкр),
Точка 4 имеет координаты n=0 и М=Мпуск. Пусковой момент вычисляют по формуле Мпуск = Мн λпуск Механическая характеристика двигателя приведена на рисунке 10.
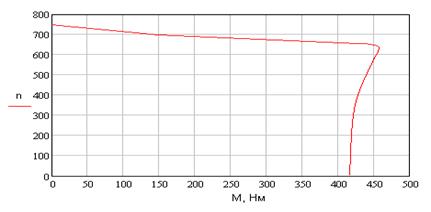
Рисунок 10 - Механическая характеристика асинхронного двигателя
Дата: 2019-05-28, просмотров: 334.