Передаточную функцию последовательного корректирующего устройства найдем графическим методом, исходя из формулы:
 . (2.8)
. (2.8)
Для этого построим ЛАЧХ исходной системы, а затем графически вычтем из желаемой ЛАЧХ исходную, получим ЛАЧХ последовательного корректирующего устройства.
Передаточная функция исходной системы имеет вид:
 .
.
Необходимые для построения ЛАЧХ сопрягающие частоты можно вычислить, преобразовав выражение (2.7):
 . (2.9)
. (2.9)
Откуда:
 ,
,  ,
,  .
.
 ,
,  ,
,  .
.

Рисунок 2.3 — Определение ЛАЧХ последовательного корректирующего устройства
В соответствии с рис. 2.3 передаточная функция последовательного корректирующего устройства будет иметь вид:
 .
.
Тогда передаточная функция скорректированной последовательным корректирующим устройством разомкнутой системы будет равна:

 .
.
Передаточная функция замкнутой системы в соответствии с формулой (1.5) примет вид:
 .
.
Реализация последовательного корректирующего устройства
Используя перечень звеньев, приведенный в источнике [1], произведем реализацию последовательного корректирующего контура с помощью последовательного соединения двух звеньев, электрические схемы которых приведены на рис. 2.4.

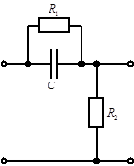
Рисунок 2.4 — Электрические схемы звеньев последовательного корректирующего устройства
Первая схема реализует следующую передаточную функцию:
 , (2.10)
, (2.10)
где  ;
;
 ;
;
 ;
;
 ;
;
 .
.
Вторая схема реализует следующую передаточную функцию:
 , (2.11)
, (2.11)
где  ;
;
 ;
;
 .
.
Реализованная последовательным соединением этих двух звеньев передаточная функция будет иметь вид:
 .
.
Сопоставляя данную передаточную функцию с выражениями (2.10) и (2.11), получим следующие параметры элементов, используемых в схемах.
Для первой схемы:
 ,
,  ,
,  ,
,  ,
,  .
.
Для второй схемы:
 ,
,  ,
,  .
.
Схема электрическая принципиальная последовательного корректирующего устройства приведена на рис. 2.5.
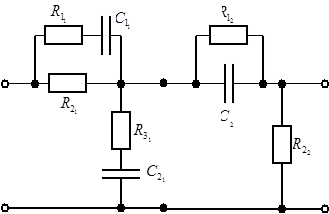
Рисунок 2.5 — Схема электрическая принципиальная последовательного корректирующего устройства
Оценка качества скорректированной САУ
Передаточная функция скорректированной последовательным корректирующим устройством разомкнутой системы будет равна:

 .
.
Передаточная функция замкнутой системы в соответствии с формулой (1.5) примет вид:
 .
.
С помощью программы Perehod.exe определяем время переходного процесса и перерегулирование:
 ,
,  .
.
Погрешность по времени переходного процесса будет равна:
 .
.
Погрешность по перерегулированию:
 .
.
График переходного процесса представлен на рисунке 2.6.
Расчет параллельного корректирующего устройства
Дата: 2019-05-28, просмотров: 325.