В асинхронных системах управления связь во времени управляющих импульсов с соответствующими точками напряжения питающей сети играет вспомогательную роль, например, служит для ограничения минимальных и максимальных значений углов управления α. Сами же управляющие импульсы получают без синхронизации напряжением сети переменного тока.
Требуемый угол α управления тиристорами в асинхронных системах создается как результат регулирования интервалов между импульсами (частоты их следования) в замкнутой системе с преобразователем или его нагрузкой.
Принцип построения асинхронной системы управления для трехфазного мостового управляемого выпрямителя иллюстрирует функциональная схема.
Необходимые для этой схемы шесть выходных каналов управляющих импульсов с фазовым сдвигом между ними в соседних каналах в 60о получают от распределителя импульсов РИ, запускаемого от импульсного модулятора ИМ регулируемой частоты. Изменение частоты ИМ осуществляется напряжением с выхода усилителя ошибки (регулятора частоты Рf) под действием напряжения уставки и напряжения датчика Д регулируемого параметра (напряжения или тока преобразователя и т.д.).
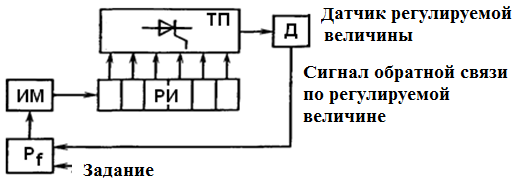
Рис.1.7 Структурная схема асинхронной СИФУ
Благодаря наличию отрицательной обратной связи в схеме автоматически создаются углы управления α обеспечивающие требуемые значения регулируемого параметра преобразователя в соответствии с заданием.
Асинхронные системы управления преобразователями применяют при существенных искажениях напряжения питающей сети, в частности при значительной несимметрии трехфазных напряжений по величине и фазе. Использование в таких условиях синхронной системы невозможно ввиду получающейся недопустимой асимметрии в углах α по каналам управления тиристорами. Наиболее распространены асинхронные СУ в преобразователях, потребляющих мощность, соизмеримую с мощностью питающей сети.
1.2 Системы управления автономными преобразователями переменного/постоянного (| AC | DC ) тока. Принципы регулирования напряжения и тока.
Регулирование автономного преобразователя осуществляется с помощью импульсной модуляции (изменения длительности включенного состояния силовых ключей по отношению к периоду модуляции).
Модуляция – изменение параметров несущего сигнала в соответствии с изменениями информационного (модулирующего) сигнала. Устройство, осуществляющее процесс модуляции, называется модулятором (лат. modulator — соблюдающий ритм). При импульсной модуляции несущими являются импульсные сигналы.
Наибольшее распространение в системах управления (СУ) автономных преобразователей получила широтно-импульсная модуляция (ШИМ). Классический ШИМ модулятор изменяет длительность tи импульсов и соответственно коэффициент заполнения D = tи/T (англ. Duty cycle) в соответствии со значением модулирующего сигнала при постоянстве периода Т следования импульсов (периода модуляции).
Широтно-импульсная модуляция AC/DC преобразователей имеет в силовой электронике несколько иное, более широкое определение, учитывающее особенности ШИМ при решении задач преобразования электроэнергии на переменном токе. Согласно МЭК 551-16-30 широтно-импульсной модуляцией называется импульсное управление, при котором ширина или частота импульсов или и та и другая модулируются в пределах периода основной частоты для того, чтобы создать определенную форму кривой выходного напряжения.
В большинстве случаев ШИМ осуществляется в целях обеспечения синусоидальности напряжения или тока, т. е. снижения уровня высших гармоник относительно основной (первой) гармоники, и называется синусоидальной. Различают следующие основные методы обеспечения синусоидальности:
- классическая ШИМ;
- гистерезисная ШИМ (или дельта-модуляция);
- модуляция пространственного вектора (векторный ШИМ).
- избирательное (селективное) подавление высших гармоник;
Классическая ШИМ
Классическим вариантом организации ШИМ является изменение ширины импульсов, формирующих выходное напряжение. Это реализуется посредством сравнения модулирующего сигнала заданной формы с опорным сигналом пилообразной формы, имеющим более высокую частоту. В рассматриваемом случае этот сигнал имеет синусоидальную форму и частоту основной (первой) гармоники формируемого напряжения.
Далее более подробно рассмотрим работу СУ однофазного полумостового инвертора напряжения, выполненного по схеме рис.1.8. Временные диаграммы работы представлены на рис.1.9. Схема ШИМ модулятора содержит генератор опорного сигнала (u0), компаратор (К), на один вход которого поступает опорный сигнал, а на другой вход модулирующий сигнал  в виде синусоиды. На выходе компаратора формируется модулированный импульсный сигнал
в виде синусоиды. На выходе компаратора формируется модулированный импульсный сигнал  . Компаратор срабатывает в моменты сравнения модулирующего и несущего сигналов. С выхода компаратора сигнал поступает на драйвер одного из силовых ключей (Др1). На драйвер (Др2) второго силового ключа поступает инверсный сигнал.
. Компаратор срабатывает в моменты сравнения модулирующего и несущего сигналов. С выхода компаратора сигнал поступает на драйвер одного из силовых ключей (Др1). На драйвер (Др2) второго силового ключа поступает инверсный сигнал.
Силовые ключи включаются поочередно, обеспечивая формирование на выходе АИН квазисинусоидального импульсного напряжения с амплитудой ±0,5Е1 (при симметричной нагрузке напряжения на разделительных конденсаторах С1,С2, имеющих одинаковую емкость, равны половине напряжения питания). Выходной ток имеет форму близкую к синусоидальной с высокочастотными пульсациями, амплитуда которых зависит от частоты модуляции f=1/T (частота несущего сигнала). Поэтому частота модуляции должна быть как минимум на порядок выше, чем частота выходного тока АИН.
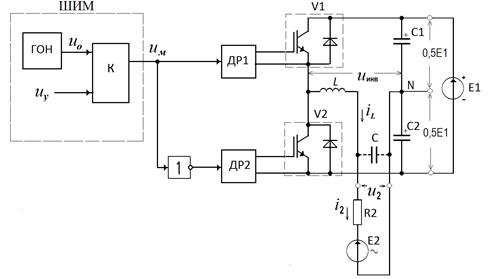
Рис. 1.8 Система управления полумостовым АИН
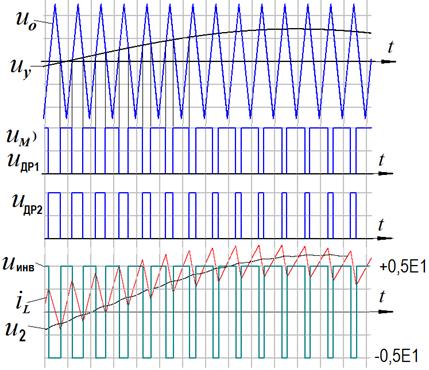
Рис. 1.9 Временные диаграммы работы системы управления АИН
Для формирования тока в AC/DC преобразователях синусоидальной или иной формы (его ограничения или стабилизации) система управления выполняется замкнутой по току.
Классический способ реализация замкнутой системы это регулирование по ошибке. Выделяется ошибка между заданным и измеренным значением управляемой величины (в нашем случае это ток реактора). Усиленный сигнал ошибки поступает на широтно-импульсный модулятор. С выхода ШИМ импульсы управления поступают через распределитель импульсов (РИ) на драйверы силовых ключей.
Пример построения AC/DC преобразователя с регулятором тока по ошибке приведен на рис.1.10
Усилитель ошибки выполнен на операционном усилителе с цепью отрицательной обратной связи. В простейшем случае усилитель ошибки, это пропорциональное звено (пропорциональный регулятор) с коэффициентом передачи Куо=Rос/R. Чаще используют пропорционально-интегральный регулятор (ПИ регулятор), который обеспечивает статическую ошибку регулирования, близкую к нулю за счет интегрирующей составляющей. Поскольку для постоянного тока конденсатор это обрыв цепи, статический коэффициент передачи равен коэффициенту передачи операционного усилителя (Ку), который составляет десятки тысяч, то ошибка регулирования близка к нулю  .
.
Усилитель ошибки регулируемой величины, включая устройство сравнения, выделяющее ошибку, называют регулятором (например, регулятор тока или регулятор напряжения).
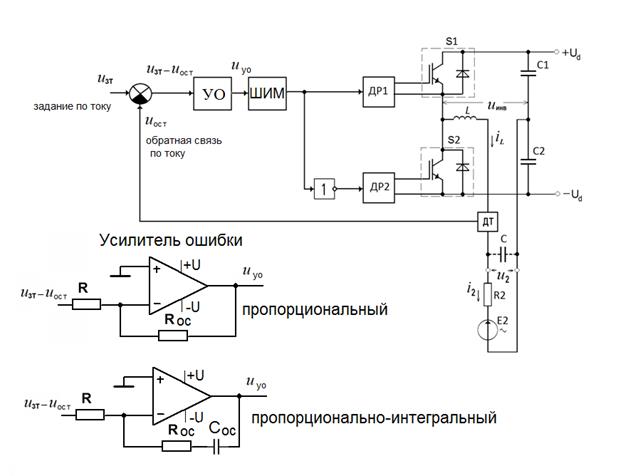
Рис.1.10. Система регулирования тока по ошибке
Гистерезисная ШИМ
Гистерезисная ШИМ представляет собой релейную двухпозиционную система регулирования тока, в которой мгновенное значение тока удерживается в пределах заданного значения тока (iз) с фиксированным отклонением (коридором) d. Реализуется так называемая гистерезисная ШИМ модуляция (или дельта-модуляция). Пример построения такой системы регулирования тока приведен на рис.1.11.
Сигнал ошибки по току поступает на релейный элемент РЭ. При превышении абсолютного значения сигнала ошибки порога срабатывания РЭ на его выходе устанавливаются «1» или «0» в в соответствии со знаком сигнала ошибки. РЭ может быть выполнен в виде усилителя с положительной обратной связью (см рис.1.11).
Переключение транзисторов происходят в момент, когда ошибка между заданием и измеренным значением тока достигает определенного значения, называемой границей гистерезиса. Частота модуляции не определена, однако её максимальное значение может быть оценено по формуле:
 ,
,
где  - ширина петли гистерезиса; L – индуктивность фазного реактора.
- ширина петли гистерезиса; L – индуктивность фазного реактора.
Достоинством системы регулирования тока является высокое быстродействие. Недостаток - изменение частоты модуляции в процессе слежения.
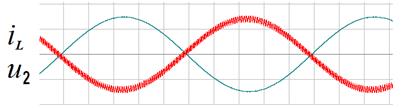
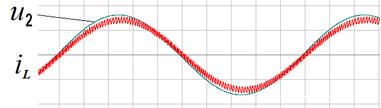
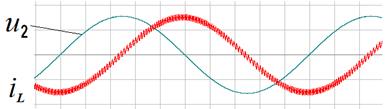
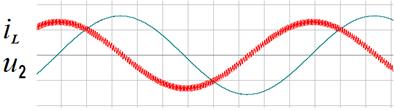
При наличии источника энергии (~Е2) в цепи переменного тока инвертора можно организовать его работу в режиме активного выпрямителя. Таким образом, возможна работа АИН, как в режиме инвертора, так и выпрямителя, т.е. реализуется работа АИН во всех четырех квадрантах системы векторов выходного тока и напряжения (см. рис.1.12 и рис.1.13).
Работа АИН на границе областей I, II и III, IV соответствует обмену с сетью реактивной мощностью. На границе I, II мощность имеет индуктивный характер (ток отстает от напряжения на 90 эл. град.), а на границе III, IV – емкостной характер (ток опережает напряжение на 90 эл. град.). Поскольку в граничном режиме обмен активной мощностью практически отсутствует нет необходимости в источнике постоянного тока Е1. Достаточно иметь в цепи постоянного тока только емкостной накопитель.
Может быть задана кривая тока произвольной формы, например, ток компенсирующий высшие гармоники. При этом частотный спектр кривой тока будет определяться параметрами выходного реактора и частотой модуляции инвертора. Чем меньше индуктивность реактора и выше частота модуляции, тем ближе кривая выходного тока к заданной. Пример задания по току и кривой тока компенсации высших гармоник (тока искажения) приведен на рис.1.14.
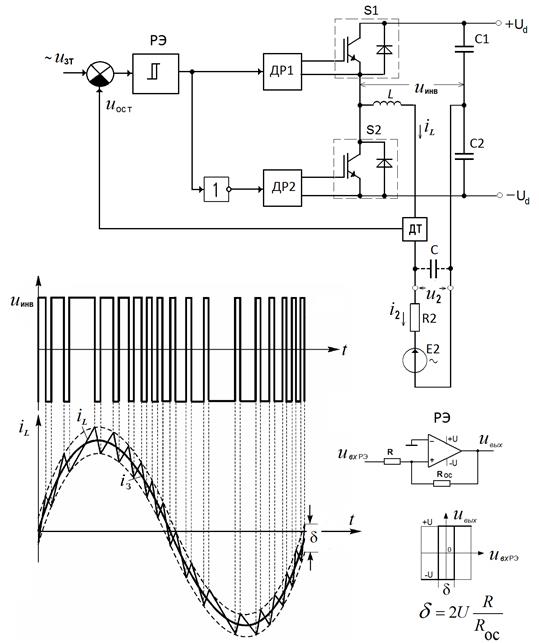
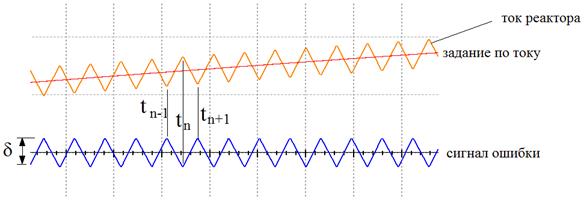
Рис.1.11 Релейная система регулирования тока
а)
б)
в)
г)
Рис.1.12 Осциллограммы тока и напряжения в цепи переменного тока автономного инвертора напряжения в режимах:
а) – инвертирования;
б) – активного выпрямления;
в) – генерирования реактивной мощности индуктивного характера;
г) – генерирования реактивной мощности емкостного характера.
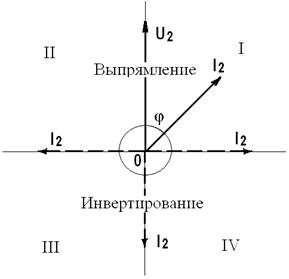
Рис.1.13. Векторная диаграмма напряжения и тока АИН
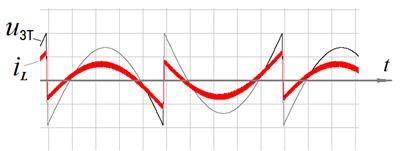
Рис.1.14 Задание по току и выходной ток инвертора в режиме компенсации тока искажения.
1.3 Система управления обратимым преобразователем переменного/постоянного тока.
На рис. 1.15 приведена функциональная схема системы управления трехфазного обратимого преобразователя переменного/постоянного тока, обеспечивающего стабилизацию напряжения на нагрузке при заданном cosj на входе путем формирования тока с помощью релейного регулирования.
Датчик напряжения ДН1 формирует опорное напряжение синусоидальной формы, которое воздействует на ячейку сдвига ЯС. В ЯС
формируется синусоидальный сигнал с заданным сдвигом по фазе j, тем самым обеспечивается регулирование требуемого cosj, на входе преобразователя.
Для стабилизации выпрямленного напряжения на выходе сигнал с датчика напряжения ДН сравнивается с Ud зад. Отклонение ∆Ud воздействует на регулятор напряжения PH, который обеспечивает расчет требуемой амплитуды заданного тока Im зад, потребляемого преобразователем со стороны входа.
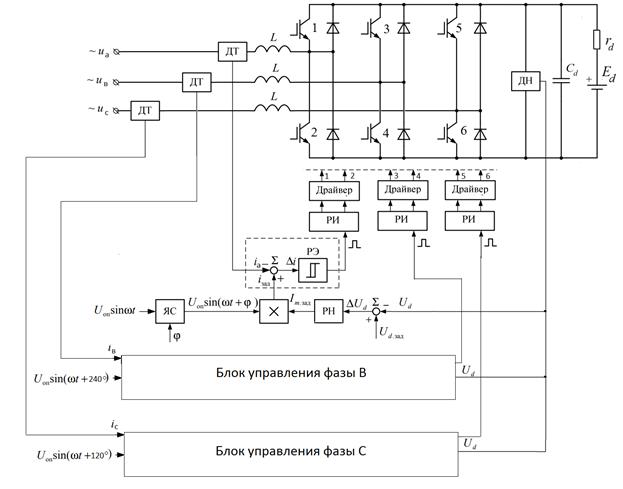
Рис.1.15
В блоке перемножения формируются мгновенные значения заданного тока. В релейном модуляторе, состоящего из сумматора и релейного элемента РЭ, сравниваются мгновенные значения фазного тока, формируемого датчиком тока ДТ, с заданным током iзад. Сигнал с выхода модулятора РЭ поступает на схему распределителя импульсов РИ, выполняющую функцию распределения импульсов управления по соответствующим силовым ключам.
Основные преимущества обратимого преобразователя переменного/постоянного тока:
1) формирование фазных токов сети, близких по форме к синусоиде;
2) возможность работы во всех четырех квадрантах системы векторов выходного тока и напряжения (активный выпрямитель, компенсатор реактивной мощности, инвертор);
3) стабилизация напряжения постоянного тока Ud на заданном уровне.
Лекция 2
Дата: 2019-04-23, просмотров: 931.