КОНСПЕКТ ЛЕКЦИЙ
Автор:
Доцент кафедры ПЭ _________________ В.Д. Поляков
«10 января 2019 г.
Москва 2019 НИУ «МЭИ»
Оглавление
Лекция 1
Сетевые преобразователи. Системы управления сетевыми преобразователями.
1.1 Управление сетевыми преобразователями
1.1.2 Системы импульсно-фазового управления ведомыми преобразователями.
1.1.2.1 Многоканальные синхронные СИФУ
1.1.2.2 Одноканальные синхронные СИФУ
1.1.2.3 Асинхронные системы импульсно-фазового управления
1.2 Системы управления автономными преобразователями переменного/постоянного (|AC|DC) тока. Принципы регулирования напряжения и тока.
1.2.1 Классическая ШИМ
1.2.2 Гистерезисная ШИМ
1.3 Система управления обратимым преобразователем переменного/постоянного тока
Лекция 2
Влияние преобразователя на питающую сеть. Понятие коэффициента мощности. Полная мощность и ее составляющие.
2.1 Влияние преобразователя на питающую сеть.
2.2 Понятие коэффициента мощности. Полная мощность и ее составляющие. Коэффициент сдвига. Коэффициент искажения.
2.3 Снижение влияния преобразователей на питающую сеть. Повышение коэффициента мощности.
Лекция 3
2.Преобразователи с улучшенным качеством потребляемой электроэнергии
2.1 Составные мостовые несимметричные преобразователи
2.2 Составные многофазные схемы выпрямления.
4.2Активный выпрямитель
Лекция 4
4. Компенсаторы реактивной мощности и мощности искажения.
4.1 Компенсаторы реактивной мощности
4.1.1 Конденсаторы, коммутируемые тиристорами
4.1.2 Реакторы, управляемые тиристорами
4.1.3 Конденсаторно-реакторные компенсаторы реактивной мощности управляемые тиристорами - статические тиристорные компенсаторы (СТК)
4.1.4 Статический компенсатор реактивной мощности (СТАТКОМ)
4.2 Компенсаторы мощности искажения
4.2.1 Пассивные фильтры
4.2.2 Активные фильтры
Лекция 5
Регулирование потоков мощности в электрических сетях
5.1 Способы и устройства регулирования мощности
5.2 Устройства продольной компенсации реактивной мощности
5.3 Фазоповоротное устройство.
5.4 Синхронный статический продольный компенсатор ССПК
5.5 Объединенный регулятор потоков мощности ОРПМ
Литература для самостоятельных занятий:
1. Попков О. З. Основы преобразовательной техники. М.: из-во МЭИ, 2005. – 200 с.
2. Зиновьев Г.С. Основы силовой электроники. Учебник Часть 1. — Новосибирск: Изд-во НГТУ, 1999. – 199 с.
3.Зиновьев Г.С. Основы силовой электроники. Учебник Часть 2. — Новосибирск: Изд-во НГТУ, 2000. – 197 с.
4. Бурман А.П., Розанов Ю.К., Шакарян Ю.Г. Управление потоками электроэнергии и повышение эффективности электроэнергетических систем. Издательство: МЭИ, 2012 – 360 с.
Приложение. Системы регулирования.
Лекция 1
Управление сетевыми преобразователями
Система управления (СУ) устройство, обеспечивающее формирование управляющих сигналов силовых ключей в необходимые моменты времени для обеспечения функций:
- пуска и остановки преобразователя,
- регулирования выходных и входных величин напряжения, тока, мощности и пр.),
- защиты преобразователя при возникновении аварийных режимов его работы, а также диагностики состояния преобразователя.
Система регулирования
Преобразователь в совокупности с нагрузкой представляют собой автоматическую систему регулирования. В соответствии с принятыми понятиями теории автоматического управления:
Нагрузка - Управляемый объект УО (см. рис.1.1);
Преобразователь - Управляющее устройство УУ (регулятор), т.е. устройство, воздействующее на УО - нагрузку.
Состояние УО (в зависимости от его устройства и функций) определяется рядом величин: - напряжением, током, мощностью, и пр.
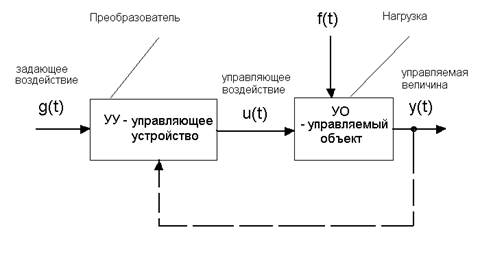
Рис.1.1 Структура системы регулирования
По характеру использования информации различают замкнутые и разомкнутые системы регулирования:
Замкнутые системы – такие системы, в которых для формирования управляющего воздействия используются информация о действительном значении управляемой величины.
Разомкнутые системы – такие системы, в которых для формирования управляющего воздействия не используются информация о действительном значении управляемой величины.
Классическая ШИМ
Классическим вариантом организации ШИМ является изменение ширины импульсов, формирующих выходное напряжение. Это реализуется посредством сравнения модулирующего сигнала заданной формы с опорным сигналом пилообразной формы, имеющим более высокую частоту. В рассматриваемом случае этот сигнал имеет синусоидальную форму и частоту основной (первой) гармоники формируемого напряжения.
Далее более подробно рассмотрим работу СУ однофазного полумостового инвертора напряжения, выполненного по схеме рис.1.8. Временные диаграммы работы представлены на рис.1.9. Схема ШИМ модулятора содержит генератор опорного сигнала (u0), компаратор (К), на один вход которого поступает опорный сигнал, а на другой вход модулирующий сигнал  в виде синусоиды. На выходе компаратора формируется модулированный импульсный сигнал
в виде синусоиды. На выходе компаратора формируется модулированный импульсный сигнал  . Компаратор срабатывает в моменты сравнения модулирующего и несущего сигналов. С выхода компаратора сигнал поступает на драйвер одного из силовых ключей (Др1). На драйвер (Др2) второго силового ключа поступает инверсный сигнал.
. Компаратор срабатывает в моменты сравнения модулирующего и несущего сигналов. С выхода компаратора сигнал поступает на драйвер одного из силовых ключей (Др1). На драйвер (Др2) второго силового ключа поступает инверсный сигнал.
Силовые ключи включаются поочередно, обеспечивая формирование на выходе АИН квазисинусоидального импульсного напряжения с амплитудой ±0,5Е1 (при симметричной нагрузке напряжения на разделительных конденсаторах С1,С2, имеющих одинаковую емкость, равны половине напряжения питания). Выходной ток имеет форму близкую к синусоидальной с высокочастотными пульсациями, амплитуда которых зависит от частоты модуляции f=1/T (частота несущего сигнала). Поэтому частота модуляции должна быть как минимум на порядок выше, чем частота выходного тока АИН.
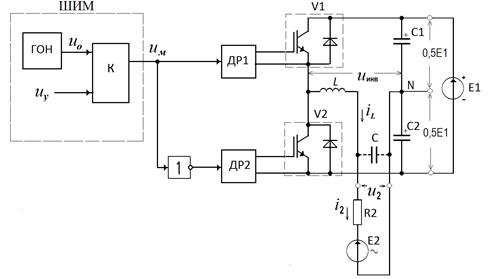
Рис. 1.8 Система управления полумостовым АИН
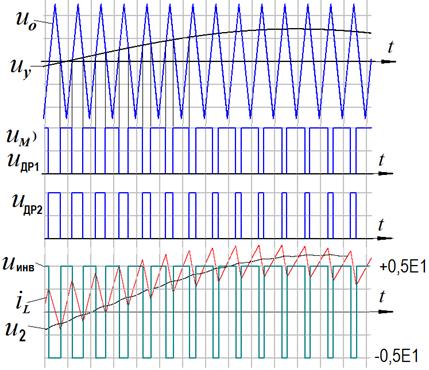
Рис. 1.9 Временные диаграммы работы системы управления АИН
Для формирования тока в AC/DC преобразователях синусоидальной или иной формы (его ограничения или стабилизации) система управления выполняется замкнутой по току.
Классический способ реализация замкнутой системы это регулирование по ошибке. Выделяется ошибка между заданным и измеренным значением управляемой величины (в нашем случае это ток реактора). Усиленный сигнал ошибки поступает на широтно-импульсный модулятор. С выхода ШИМ импульсы управления поступают через распределитель импульсов (РИ) на драйверы силовых ключей.
Пример построения AC/DC преобразователя с регулятором тока по ошибке приведен на рис.1.10
Усилитель ошибки выполнен на операционном усилителе с цепью отрицательной обратной связи. В простейшем случае усилитель ошибки, это пропорциональное звено (пропорциональный регулятор) с коэффициентом передачи Куо=Rос/R. Чаще используют пропорционально-интегральный регулятор (ПИ регулятор), который обеспечивает статическую ошибку регулирования, близкую к нулю за счет интегрирующей составляющей. Поскольку для постоянного тока конденсатор это обрыв цепи, статический коэффициент передачи равен коэффициенту передачи операционного усилителя (Ку), который составляет десятки тысяч, то ошибка регулирования близка к нулю  .
.
Усилитель ошибки регулируемой величины, включая устройство сравнения, выделяющее ошибку, называют регулятором (например, регулятор тока или регулятор напряжения).
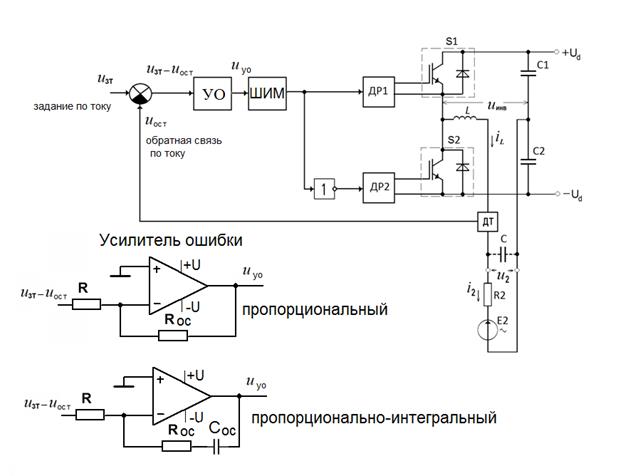
Рис.1.10. Система регулирования тока по ошибке
Гистерезисная ШИМ
Гистерезисная ШИМ представляет собой релейную двухпозиционную система регулирования тока, в которой мгновенное значение тока удерживается в пределах заданного значения тока (iз) с фиксированным отклонением (коридором) d. Реализуется так называемая гистерезисная ШИМ модуляция (или дельта-модуляция). Пример построения такой системы регулирования тока приведен на рис.1.11.
Сигнал ошибки по току поступает на релейный элемент РЭ. При превышении абсолютного значения сигнала ошибки порога срабатывания РЭ на его выходе устанавливаются «1» или «0» в в соответствии со знаком сигнала ошибки. РЭ может быть выполнен в виде усилителя с положительной обратной связью (см рис.1.11).
Переключение транзисторов происходят в момент, когда ошибка между заданием и измеренным значением тока достигает определенного значения, называемой границей гистерезиса. Частота модуляции не определена, однако её максимальное значение может быть оценено по формуле:
 ,
,
где  - ширина петли гистерезиса; L – индуктивность фазного реактора.
- ширина петли гистерезиса; L – индуктивность фазного реактора.
Достоинством системы регулирования тока является высокое быстродействие. Недостаток - изменение частоты модуляции в процессе слежения.
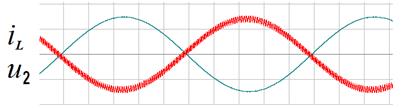
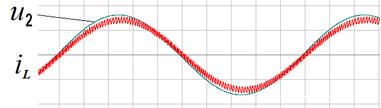
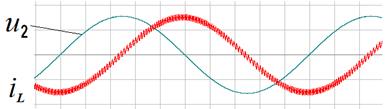
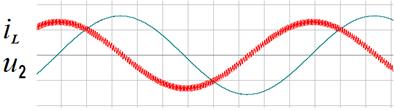
При наличии источника энергии (~Е2) в цепи переменного тока инвертора можно организовать его работу в режиме активного выпрямителя. Таким образом, возможна работа АИН, как в режиме инвертора, так и выпрямителя, т.е. реализуется работа АИН во всех четырех квадрантах системы векторов выходного тока и напряжения (см. рис.1.12 и рис.1.13).
Работа АИН на границе областей I, II и III, IV соответствует обмену с сетью реактивной мощностью. На границе I, II мощность имеет индуктивный характер (ток отстает от напряжения на 90 эл. град.), а на границе III, IV – емкостной характер (ток опережает напряжение на 90 эл. град.). Поскольку в граничном режиме обмен активной мощностью практически отсутствует нет необходимости в источнике постоянного тока Е1. Достаточно иметь в цепи постоянного тока только емкостной накопитель.
Может быть задана кривая тока произвольной формы, например, ток компенсирующий высшие гармоники. При этом частотный спектр кривой тока будет определяться параметрами выходного реактора и частотой модуляции инвертора. Чем меньше индуктивность реактора и выше частота модуляции, тем ближе кривая выходного тока к заданной. Пример задания по току и кривой тока компенсации высших гармоник (тока искажения) приведен на рис.1.14.
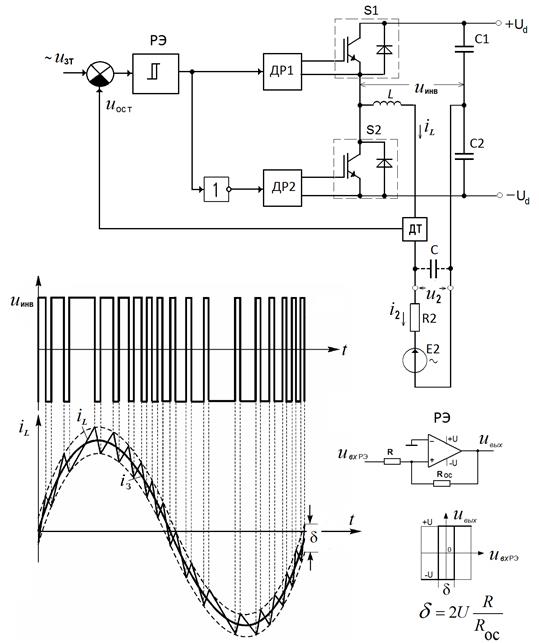
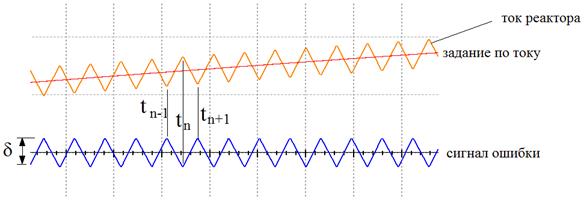
Рис.1.11 Релейная система регулирования тока
а)
б)
в)
г)
Рис.1.12 Осциллограммы тока и напряжения в цепи переменного тока автономного инвертора напряжения в режимах:
а) – инвертирования;
б) – активного выпрямления;
в) – генерирования реактивной мощности индуктивного характера;
г) – генерирования реактивной мощности емкостного характера.
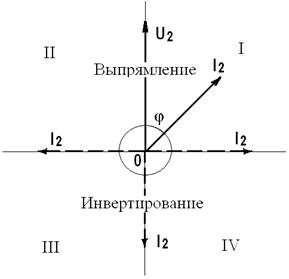
Рис.1.13. Векторная диаграмма напряжения и тока АИН
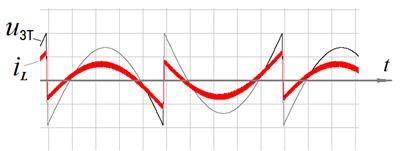
Рис.1.14 Задание по току и выходной ток инвертора в режиме компенсации тока искажения.
1.3 Система управления обратимым преобразователем переменного/постоянного тока.
На рис. 1.15 приведена функциональная схема системы управления трехфазного обратимого преобразователя переменного/постоянного тока, обеспечивающего стабилизацию напряжения на нагрузке при заданном cosj на входе путем формирования тока с помощью релейного регулирования.
Датчик напряжения ДН1 формирует опорное напряжение синусоидальной формы, которое воздействует на ячейку сдвига ЯС. В ЯС
формируется синусоидальный сигнал с заданным сдвигом по фазе j, тем самым обеспечивается регулирование требуемого cosj, на входе преобразователя.
Для стабилизации выпрямленного напряжения на выходе сигнал с датчика напряжения ДН сравнивается с Ud зад. Отклонение ∆Ud воздействует на регулятор напряжения PH, который обеспечивает расчет требуемой амплитуды заданного тока Im зад, потребляемого преобразователем со стороны входа.
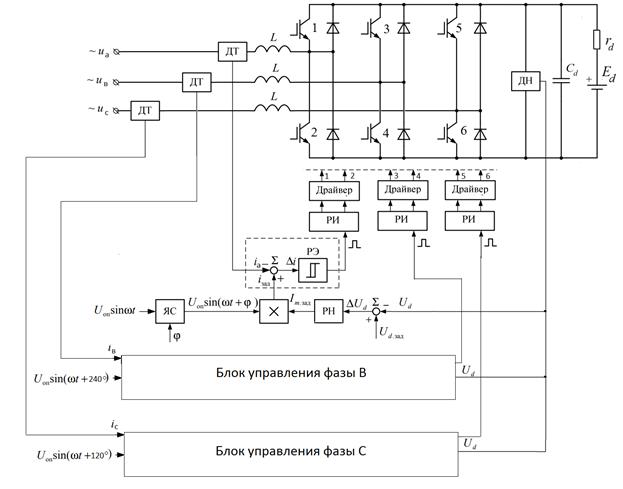
Рис.1.15
В блоке перемножения формируются мгновенные значения заданного тока. В релейном модуляторе, состоящего из сумматора и релейного элемента РЭ, сравниваются мгновенные значения фазного тока, формируемого датчиком тока ДТ, с заданным током iзад. Сигнал с выхода модулятора РЭ поступает на схему распределителя импульсов РИ, выполняющую функцию распределения импульсов управления по соответствующим силовым ключам.
Основные преимущества обратимого преобразователя переменного/постоянного тока:
1) формирование фазных токов сети, близких по форме к синусоиде;
2) возможность работы во всех четырех квадрантах системы векторов выходного тока и напряжения (активный выпрямитель, компенсатор реактивной мощности, инвертор);
3) стабилизация напряжения постоянного тока Ud на заданном уровне.
Лекция 2
Лекция 3
Лекция 4
4 Компенсаторы реактивной мощности и мощности искажения.
Компенсаторы можно разделить на три группы:
• компенсаторы реактивной мощности;
• компенсаторы мощности искажения;
• компенсаторы всех неактивных составляющих полной мощности.
По способу подключения к сети различают параллельные и последовательные компенсаторы.
4.1 Компенсаторы реактивной мощности
Пассивные фильтры
Параллельно нелинейной нагрузке устанавливается LC-контур, настроенный на частоту гармоники, которую необходимо подавить. Этот контур поглощает гармоники, предотвращая их попадание в сеть.
Обычно пассивный фильтр настраивается на частоту, близкую к частоте гармоники, которую необходимо подавить. Если требуется подавление нескольких гармоник, могут использоваться несколько параллельно соединенных фильтров.
На рис. 4.14 представлена схема пассивного фильтра, содержащего систему колебательных LC-контуров с резонансом напряжений. Частота резонанса в каждом из контуров соответствует частотам наиболее интенсивных высших гармонических составляющих напряжения сети, обусловленных работой преобразователя (или другой нелинейной нагрузки). В трехфазных системах гармоники, кратные трем, обычно в силу симметрии отсутствуют, и гармоническими составляющими напряжения в сети бывают 5, 7, 11, 13-я и т.д. гармоники. Низшие из них наиболее интенсивны.
Резонансная частота контура L5C5 ω5=5ω, для этого контура выполняется соотношение:
 (4.8)
(4.8)
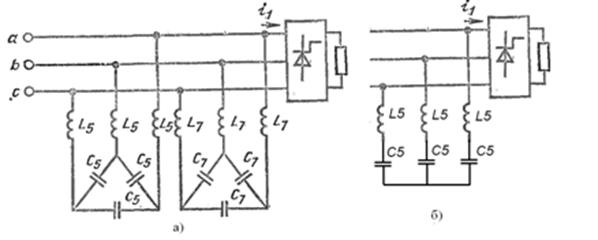
Рис. 4.14 Схема подключения пассивного фильтра
В контуре L 7 C 7 резонанс наступает на частоте ω7=7ω, поэтому
 . (4.9)
. (4.9)
При резонансе входное сопротивление каждого из контуров равно нулю (если пренебречь потерями в L и С) и через них замыкаются гармонические составляющие токов, генерируемые преобразователем, минуя питающую сеть. В результате искажения кривой сетевого напряжения резко снижаются.
При соединении конденсаторов в «звезду» как это показано на рис. 4.14, б резонансная частота определяется выражением
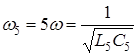 . (4.10)
. (4.10)
На частоте сети ω сопротивление контуров L5C5 и L7C7 имеет емкостной характер и конденсаторы C5 и C7 компенсируют реактивную мощность, потребляемую преобразователем, подобно конденсаторам компенсаторам. За счет этого пассивный фильтр не только позволяет снизить искажения формы питающего напряжения в сети, но и уменьшить потребление реактивной мощности по основной гармонике, поэтому это устройство можно считать также источником реактивной мощности.
Применение совместно с пассивными фильтрами реактора управляемого тиристорами позволяет поддерживать коэффициент мощности на максимальном уровне при изменении режима работы нелинейной нагрузки.
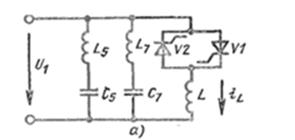
Рис. 4.15.
Схема такого однофазного устройства приведена на рис. 4.15. В трехфазных схемах используются три аналогичные схемы. Управляемый источник реактивной мощности состоит из пассивных фильтров, настроенных на частоты наиболее интенсивных гармонических составляющих тока и РУТ на двух тиристорах V1 и V2, имеющего нагрузку в виде индуктивности L. Устройство подавляет гармонические искажения напряжения сети на 5-й и 7-й гармониках, а конденсаторы C5 и C7 генерируют реактивную мощность Qc на частоте сети.
Таким образом, рассмотренный источник реактивной мощности генерирует реактивную мощность и осуществляет ее регулирование, подавляя при этом гармонические искажения в сети.
Активные фильтры
Идея компенсации искажений токов и напряжений в сети, т.е. активная фильтрация, основана на введении в сеть параллельно источника тока с управляемым искажением тока или последовательно источника напряжения с управляемым искажением напряжения, причем вносимые искажения находятся в противофазе с имеющимися искажениями и компенсируют их в результирующей кривой тока или напряжения.
Эта идея иллюстрируется на рис. 4.16 – для активного фильтра тока. Если нелинейная нагрузка потребляет несинусоидальный ток (входной ток трехфазного мостового выпрямителя), то компенсатор генерирует ток, равный в противофазе разности мгновенной кривой тока нелинейной нагрузки iп и ее первой гармоники i(1).
Схемы активных фильтров тока (напряжения) обычно выполняют на базе инверторов напряжения с ШИМ. На выходе инвертора можно воспроизвести любую кривую задания тока (напряжения) iк (или uк) путем аппроксимации ее средними значениями по интервалам тактов коммутации при ШИМ. Точность воспроизведения на выходе инвертора тока iк (или напряжения uк) зависит от точной передачи спектра этих кривых до частоты их верхней гармоники, определяемой в соответствии с теоремой отсчетов Котельникова половиной частоты коммутации при ШИМ. Так для подавления в результирующем токе сети всех гармоник входного тока трехфазного мостового выпрямителя вплоть, например, до 23-й, относительное значение которой в спектре 1/23, т.е. менее 5 % , необходима частота коммутации в интервале не ниже 2 ⋅ 23 ⋅ 50 = 2300 Гц, что вполне допустимо для силовых транзисторов.
Техническая реализация такого воспроизведения обеспечивается при использовании управления инвертором по методу слежения за заданной кривой тока.
На рис.4.17 приведена схема однофазного активного фильтра на базе полумостового инвертора. На входе инвертора в цепь реактора L включен датчик тока компенсирующего тока. Сигнал ~iос с его выхода сравнивается с сигналом задания ~iз, который формируется путем суммирования сигнала высших гармоник ~-iв (с обратным знаком) и сигнала ~iкп компенсации активных потерь в инверторе. Сигнал ошибки поступает на релейный элемент РЭ, формирующий гистерезисный ШИМ сигнал управления транзисторами инвертора (VT1,VT2). Выделение высших гармоник тока iп осуществляется микропроцессором с использованием метода Фурье.
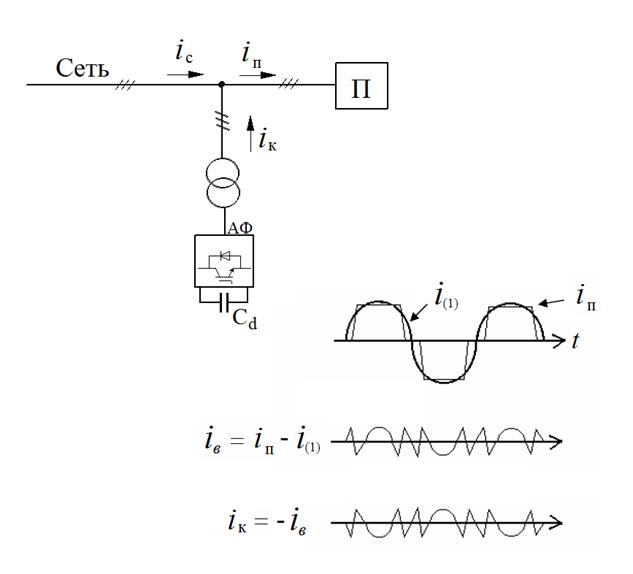
Рис. 4.16 Схема подключения параллельного активного фильтра тока.
Блок расчета тока потерь реализуется на базе регулятора напряжения Ud постоянного тока. При этом, сигнал с выхода регулятора умножается на сигнал пропорциональный сетевому напряжению ~uc подобно как это происходит в активном выпрямителе (см. раздел 3.2). В результате формируется сигнал ~iкп, совпадающий по фазе с напряжением сети ~uc. Чем больше сигнал ошибки по напряжению Ud, тем больше сигнал компенсации потерь ~iкп.
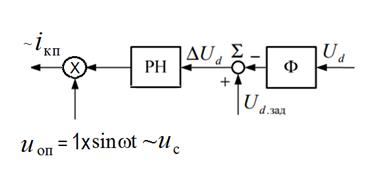
Рис. 4.17 Схема активного фильтра для однофазной сети
На рис. 4.18 приведена схема реализации компенсатора неактивных составляющих мощности (мощности искажения и реактивной мощности). В отличие от рис. 4.17 схема содержит блок выделения неактивной составляющей тока потребителя iп. Блок производит вычисление потребляемой активной мощности по формуле (4.11), затем вычисляет действующее и мгновенное значение активного тока по (4.12 и 4.13) и определяет ток неактивных составляющих по формуле (4.14).
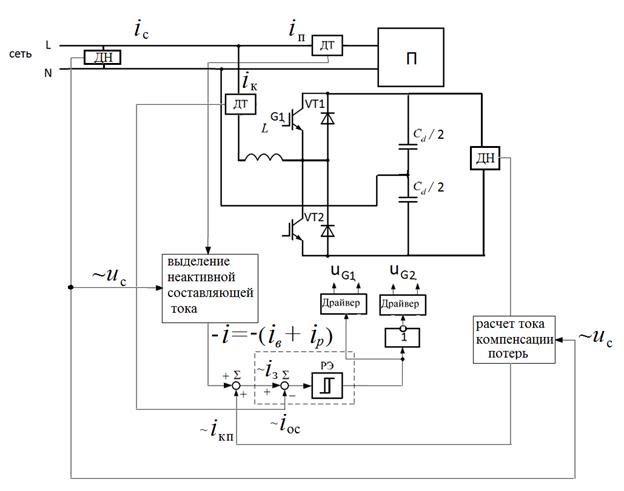
Рис. 4.18 Схема компенсатора неактивных составляющих тока
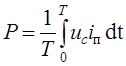 (4.11),
(4.11),
 (4.12),
(4.12),
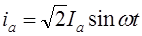 (4.13),
(4.13),
 (4.14).
(4.14).
Далее формируется сигнал задания тока компенсатора  .
.
Гибридные фильтры
Гибридный фильтр состоит из комбинации пассивных и активных фильтров (рис. 4.19 ) Он обладает преимуществами обоих типов фильтров и пригоден для применения в широком диапазоне мощностей и режимов работы нелинейной нагрузки.
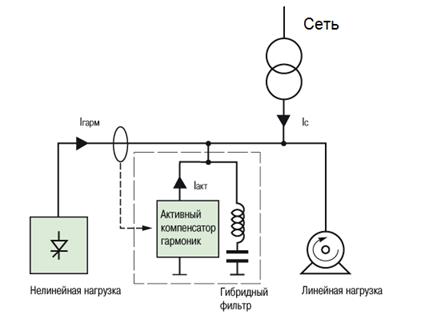
Рис. 4.19 Принцип действия гибридного фильтра
Лекция 5
Рис 6.6 – Векторная диаграмма напряжений
при использовании УПК
Из векторной диаграммы следует: применение УПК приводит к уменьшению напряжения в начале передачи, продольной и поперечной составляющих падения напряжения.
Если подобрать УПК так, что Х = Хс, т.е обеспечить полную компенсацию индуктивного сопротивления ЛЭП, то падение напряжения будет определяться только величиной активного сопротивления ЛЭП
 (5.6)
(5.6)  (5.7)
(5.7)
В этом случае напряжение в начале передачи будет равно отрезку ob.
Можно найти такое значение Хс, чтобы потеря напряжения в сети равнялась нулю. Если пренебречь поперечной составляющей падения напряжения, имеем
 . (5.8)
. (5.8)
Найдем величину Хс:
 ; (5.9)
; (5.9)
 . (5.10)
. (5.10)
По значению Хс подбирают мощность батареи конденсаторов. На практике чаще всего не применяют полную компенсацию, и сопротивление УПК рассчитывают из потери напряжения, которая обеспечивает желаемый уровень напряжения в сети.
Из формулы для расчета потери напряжения с учетом УПК видно, что применение конденсаторов целесообразно при значительной реактивной составляющей тока, т.е. когда  близок к единице. При малых значениях потеря напряжения в ЛЭП определяется в основном активным сопротивлением.
близок к единице. При малых значениях потеря напряжения в ЛЭП определяется в основном активным сопротивлением.
Фазоповоротное устройство.
Простейшая схема ФПУ состоит из двух трансформаторов: параллельного Т1 и последовательного Т2, создающего вектор дополнительного напряжения в линии, что формирует фазовый сдвиг по отношению к основному напряжению на некоторый регулируемый угол. Вариант ФПУ с тиристорным управлением обладает быстродействием, способен влиять не только на распределение потоков активной мощности, но и на пределы динамической устойчивости.
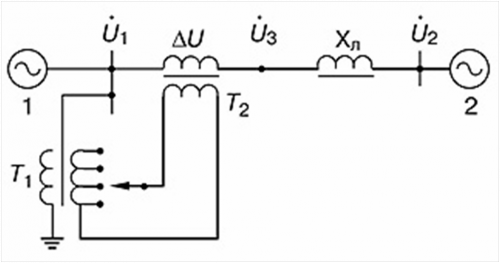
Рис. 6.7 Схема фазоповоротного устройства
Мощность P в цепи, содержащей ЛЭП и ФПУ, определяется по выражению (5.11):
 (5.11)
(5.11)
где U1, U2 – напряжения по концам ЛЭП; ХЛЭП – индуктивное сопротивление ЛЭП; d - угол между векторами напряжений U1 и U2; φ - угол между векторами напряжений U1 и U3
ФПУ применяются для распределения энергии между параллельно работающими ЛЭП. При включении в сеть ФПУ, электроэнергия распределяется по линиям электропередач пропорционально косинусу разности фазовых углов напряжения на входе и выходе линии. Там, где между двумя точками существуют параллельные цепи, прямое управление величиной фазового угла позволяет контролировать распределение потока электроэнергии между ними, предотвращая перегрузки.
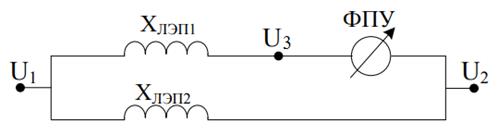
Рис. 5.8 Схема двух ЛЭП с ФПУ
 (5.12)
(5.12)
 (5.13)
(5.13)
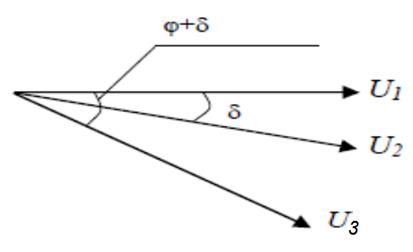
Рис. 5.9 Векторная диаграмма напряжений ЛЭП с установленным ФПУ
Быстродействие ФПУ было повышено за счет замены механических ключей обмоток трансформаторов тиристорными ключами. Следует отметить, что ФПУ используется в основном для регулирования
угла  в целях обеспечения баланса мощности в энергосистемах, содержащих линии электропередачи различного класса напряжения и для увеличения стабильности систем в переходных процессах. Реализация последней функции связана с повышением быстродействия ФПУ, что дает замена механических ключей на тиристоры.
в целях обеспечения баланса мощности в энергосистемах, содержащих линии электропередачи различного класса напряжения и для увеличения стабильности систем в переходных процессах. Реализация последней функции связана с повышением быстродействия ФПУ, что дает замена механических ключей на тиристоры.
5.4 Синхронный статический продольный компенсатор ССПК выполнен на полностью управляемых ключах и представляет собой СТАТКОМ, включенный в линию последовательно. Схема последовательного компенсатора представлена на рис 5.10. ССПК можно считать идеальным генератором реактивной мощности, который вводит последовательно в линию добавочное напряжение, регулируемое по величине и фазе. Если вводимое напряжение совпадает по фазе с линейным током, то сериесный компенсатор работает аналогично ФПУ.
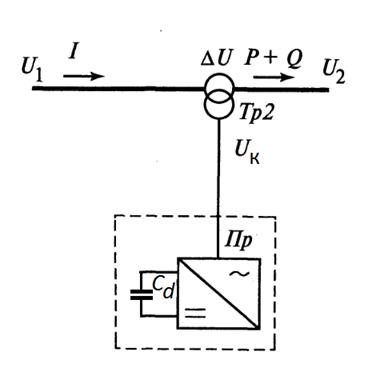
Рис. 5.10. Структурная схема ССПК
Когда добавочное напряжение будет в квадратуре с линейным током, ССПК будет работать в режиме компенсации реактивной мощности, потребляя ее, если вектор вводимого напряжения опережает ток в линии и, генерируя ее, при изменении полярности этого напряжения. Таким образом, последовательный компенсатор способен компенсировать продольные параметры линии электропередачи и изменять фазный угол вектора напряжения на ее конце. Это означает, что введенное напряжение с регулируемым модулем и фазой позволяет управлять потоками активной и реактивной мощности.
ССПК имеет широкий диапазон регулирования. С помощью ССПК можно поддерживать желаемое значение потока активной мощности в компенсированной линии в предельных режимах эксплуатации. Такая функциональная особенность обусловлена идентичными диапазонами регулирования в индуктивном и емкостном режимах. В отличие от последовательного тиристорного компенсатора добавочное напряжение, вводимое СТАТКОМом, не зависит от тока в линии.
Приложение
Системы регулирования
Система регулирования
Преобразователь в совокупности с нагрузкой представляют собой автоматическую систему регулирования. В соответствии с принятыми понятиями теории автоматического управления:
Нагрузка - Управляемый объект УО (см. рис.1);
Преобразователь - Управляющее устройство УУ (регулятор), т.е. устройство, воздействующее на УО - нагрузку.
Состояние УО (в зависимости от его устройства и функций) определяется рядом величин: - напряжением, током, мощностью, температурой, скоростью и т.п.

Рис.1 Структура системы регулирования
По характеру использования информации различают замкнутые и разомкнутые системы регулирования:
Замкнутые системы – такие системы, в которых для формирования управляющего воздействия используются информация о действительном значении управляемой величины.
Разомкнутые системы – такие системы, в которых для формирования управляющего воздействия не используются информация о действительном значении управляемой величины.
По характеру воздействия во времени (характеру сигналов) преобразователь относится к непрерывно-дискретным системам, в которых есть как непрерывные, так и дискретные сигналы, т.е. сигналы определенные только в отдельные моменты времени.
В непрерывной системе необходимая для управления информация есть в любой момент времени, сигналы (воздействия) в ней непрерывны во времени и по уровню. Связи между элементами сохраняются всегда, т.е. любое непрерывное изменение входного сигнала во времени вызывает также непрерывное изменение входных и выходных сигналов у всех последующих элементов. В системах прерывистого регулирования (дискретных), связи между элементами сохраняются не всегда. Такие системы содержат элемент, который при непрерывном изменении сигнала на входе передаст его дальше прерывисто.
Замкнутые системы по принципу регулирования делятся на:
- системы регулирования по ошибке (отклонению)
- релейные системы регулирования.
Регулирование по ошибке. Идея принципа состоит в том, что определяется ошибка между заданным и истинным значением регулируемой величины. В зависимости от значения и знака этой ошибки осуществляется регулирующее воздействие на объект регулирования, сводящее эту ошибку к нулю, т.е. обеспечивающее тем самым изменение регулируемой величины по требуемому закону.
Релейная система регулирования - система автоматического регулирования, устойчивое функционирование которой обеспечивается периодическим переключением направления движения. При этом управляющее воздействие может принимать ограниченное число фиксированных значений. В типовом случае – два.
Система автоматического регулирования называется релейной, если она содержит хотя бы один релейный элемент. В релейном элементе при плавном изменении входного сигнала выходной сигнал изменяется скачкообразно. Моменты времени, в которые происходит изменение выходного сигнала, заранее неизвестны; они не задаются извне, а определяются внутренними свойствами самой автоматической системы.
Релейные системы обладают рядом преимуществ, благодаря которым они широко используются в системах автоматического управления:
- простота устройства и надежность в работе;
- высокое быстродействие;
- стабильность выходного параметра при широком диапазоне изменения входного сигнала;
- возможность реализовать сложный логический алгоритм работы.
Требования к системе регулирования. Качество регулирования.
Можно выделить три основных требования к системе регулирования:
1. Устойчивость – свойство системы автоматического регулирования возвращаться к первоначальному состоянию после прекращения действия внешнего возмущения. Система должна оставаться устойчивой на всех режимах;
Формальное определение внутренней устойчивости было введено в работах Александра Михайловича Ляпунова, поэтому такое понятие устойчивости принято называть устойчивостью по Ляпунову.
Система называется устойчивой по Ляпунову в положении равновесия x*, если при начальном отклонении от положения равновесия x* не более, чем на δ, траектория движения отклоняется от x* не более, чем на ε, причем для каждого ε можно найти соответствующее ему δ (ε ) :

Фактически это означает, что чем меньше начальное отклонение, тем меньше траектория движения отклоняется от положения равновесия. Если вектор состояния стремится к положению равновесия, то есть, x(t) − x* →0 при t →∞, система называется асимптотически устойчивой в положении равновесия x*.
2. Точность - степень приближения истинного значения регулируемой величины к ее заданному значению в установившемся режиме. При этом ошибка не должна превышать допустимого значения.
Точность регулирования задается как допустимая ошибка регулирования (обычно в % к заданному или установившемуся значению этой величины)
3. Качество переходных процессов – при смене заданного значения система должна переходить в нужное состояние по возможности быстро и плавно.
В совокупности эти три требования определяют качество регулирования. Можно выделить три основные группы основных критериев качества:
1.Критерии точности – в качестве критерия используют величину ошибки в типовых режимах:
- Ненулевое, неподвижное (стационарное) состояние.
- Движение с постоянной скоростью.
- Движение с постоянным ускорением.
- Движение по гармоническому закону
2.Критерии запаса устойчивости – оценивают удаленность САР (системы автоматического регулирования) от границы устойчивости.
3.Критерии быстродействия – оценивают быстроту реагирования САР на изменение задающего или на появление возмущающего воздействий.
Существуют три основных подхода к оценке качества регулирования:
1.Определение качества по переходной характеристике (реакции системы на единичный ступенчатый входной сигнал или реакция системы на возмущающее воздействие – сброс/наброс нагрузки).
2. Оценка качества по частотным свойствам системы регулирования.
3. Оценка качества по расположению нулей и полюсов передаточной функции замкнутой системы регулирования, так называемая корневая оценка качества.
Частотные оценки качества
Качество системы можно оценить не только по переходной характеристике, но по частотной характеристике.
Критерий Найквиста позволяет определить устойчивость замкнутой системы, построив частотную характеристику разомкнутой системы. Пусть Wp(s) – передаточная функция разомкнутой системы, а Wp(ω j) – ее частотная характеристика. Соответственно можно выделить амплитудночастотную A(ω) и фазочастотную φ(ω) характеристики.
Частота ωcр, для которой A(ωcр)=1, называется частотой среза. Для устойчивой системы значение фазы на частоте среза должно быть больше, чем −180°.
Вместо A(ω) обычно используют логарифмическую амплитудную частотных характеристику (ЛАЧХ): график, на котором по оси абсцисс откладывается десятичный логарифм частоты lg(ω), а по оси ординат – величина Lm(ω) = 20lgA(ω), измеряемая в децибелах (дБ). При построении логарифмической фазовой частотной характеристики (ЛФЧХ) по оси абсцисс также откладывается логарифм частоты lg ω.
Недостаточно спроектировать просто устойчивую систему, нужно, чтобы система, обладала некоторым запасом устойчивости. Чем выше запас устойчивости, тем лучше качество системы.
Обычно рассматривают запасы устойчивости по амплитуде и по фазе. Запас устойчивости по амплитуде gm – это дополнительное усиление контура, которое необходимо, чтобы вывести систему на границу области устойчивости. Эта величина измеряется в децибелах.
Запас по амплитуде вычисляется по формуле gm = 20lg( 1/ Ag),
где Ag < 1 значение амплитудной характеристики на частоте ωg, где фазовая характеристика равна −180°.
Запасы устойчивости легко определяются по логарифмическим частотным характеристикам:
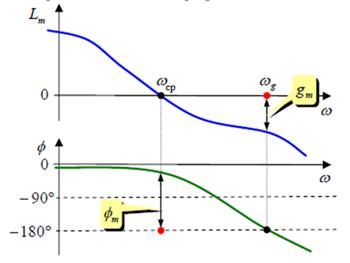
Рис. 5
Заметим, что запас по амплитуде может быть равен бесконечности, если фазовая характеристика не пересекает линию −180° .
Частота среза  косвенно характеризует длительность переходного процесса. Время регулирования системы обратно пропорционально частоте среза. Частота среза, как характеристика быстродействия систем получила распространение, так как она легко определяется на логарифмических частотных характеристиках.
косвенно характеризует длительность переходного процесса. Время регулирования системы обратно пропорционально частоте среза. Частота среза, как характеристика быстродействия систем получила распространение, так как она легко определяется на логарифмических частотных характеристиках.
Корневая оценка качества
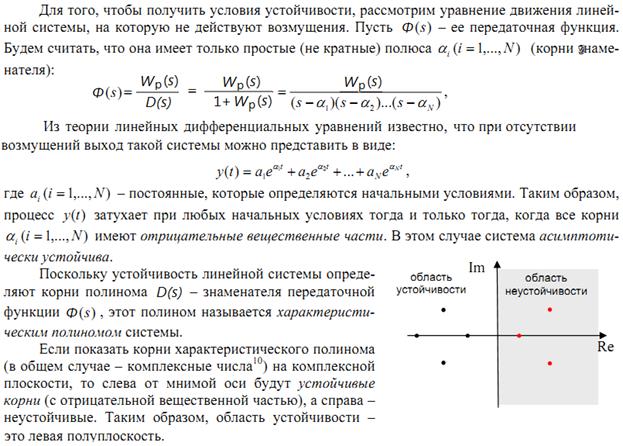
Поскольку корни передаточной функции Φ(s)=  , однозначно определяют вид переходного процесса, их можно использовать для оценки устойчивости и быстродействия. Обычно обходятся исследованием только полюсов Φ(s), т.е. корней характеристического уравнения (полинома) D(s)=1+W(s)=0. Свойства системы можно предсказать, посмотрев на расположение корней характеристического полинома на комплексной плоскости. Прежде всего, все корни D(s) для устойчивой системы должны находиться в левой полуплоскости, то есть слева от мнимой оси.
, однозначно определяют вид переходного процесса, их можно использовать для оценки устойчивости и быстродействия. Обычно обходятся исследованием только полюсов Φ(s), т.е. корней характеристического уравнения (полинома) D(s)=1+W(s)=0. Свойства системы можно предсказать, посмотрев на расположение корней характеристического полинома на комплексной плоскости. Прежде всего, все корни D(s) для устойчивой системы должны находиться в левой полуплоскости, то есть слева от мнимой оси.
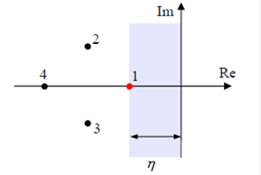
Рис.6
Быстродействие системы определяется степенью быстродействия η – так называется расстояние мнимой оси до ближайшего корня или пары комплексно-сопряженных корней. Т.е. если этот корень −α±jβ, то η равна коэффициенту затухания α.
На рисунке точками отмечены положения корней характеристического полинома. Он имеет два вещественных корня (обозначенных номерами 1 и 4) и пару комплексно сопряженных корней (2 и 3). Степень быстродействия определяется корнем наиболее ближе всех расположенным к мнимой оси (корень 1 в нашем случае). Этот корень называется доминирующим, он определяет самые медленные движения в системе и время переходного процесса, которое может быть примерно рассчитано по формуле

Корни 2, 3 и 4 соответствуют более быстрым движениям.
Параметр, определяющий скорость затухания колебаний в системе, называется колебательностью. Колебательность μ для пары комплексно-сопряженных корней α ± jβ вычисляется как отношение мнимой и вещественной частей корня (по модулю):

Чем больше эта величина, тем слабее затухают колебания, вызванные этими корнями, за 1 период колебаний.
Линии постоянной колебательности – это лучи, выходящие из начала координат. При проектировании систем обычно требуется обеспечить быстродействие не ниже заданного (степень быстродействия не меньше заданной ηmin) и колебательность не выше заданной μmax. Эти условия определяют усеченный сектор на комплексной плоскости.
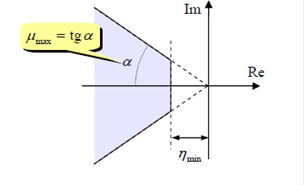
Рис.3.7
Колебательность определяет другой показатель ξ – относительный коэффициент затухания амплитуды колебаний y(t)=Ce−αtsin(βt+φ) за один период:
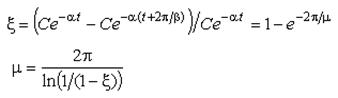 .
.
Чем больше ξ, тем быстрее затухают колебания. При ξ≥1 процессы носят апериодический характер.
Условия устойчивости
КОНСПЕКТ ЛЕКЦИЙ
Автор:
Доцент кафедры ПЭ _________________ В.Д. Поляков
«10 января 2019 г.
Москва 2019 НИУ «МЭИ»
Оглавление
Лекция 1
Сетевые преобразователи. Системы управления сетевыми преобразователями.
1.1 Управление сетевыми преобразователями
1.1.2 Системы импульсно-фазового управления ведомыми преобразователями.
1.1.2.1 Многоканальные синхронные СИФУ
1.1.2.2 Одноканальные синхронные СИФУ
1.1.2.3 Асинхронные системы импульсно-фазового управления
1.2 Системы управления автономными преобразователями переменного/постоянного (|AC|DC) тока. Принципы регулирования напряжения и тока.
1.2.1 Классическая ШИМ
1.2.2 Гистерезисная ШИМ
1.3 Система управления обратимым преобразователем переменного/постоянного тока
Лекция 2
Дата: 2019-04-23, просмотров: 497.