Качество переходных процессов в линейных системах обычно оценивают по переходным функциям.
Переходной функцией h (t) называется график изменения во времени управляемой (регулируемой) величины системы при подаче на систему единичного управляющего или возмущающего воздействий.
Показатели качества управления, определяемые непосредственно по переходным функциям, называют прямыми показателями качества управления. Рассмотрим оценку прямых показателей качества управления для нашей системы. Отклонение регулируемой величины от своего установившегося значения характеризуется следующими показателями.
Для переходной функции по управляющему воздействию определяется перерегулирование:
 ,
,
где  - максимальное значение регулируемой величины в переходном процессе;
- максимальное значение регулируемой величины в переходном процессе;
 - установившееся значение регулируемой величины.
- установившееся значение регулируемой величины.
В нашем случае

Перерегулирование характеризует запас устойчивости системы. В нашем случае система полностью устойчива. Для переходных функций по возмущающему воздействию определяется максимальное отклонение регулируемой величины от установившегося значения, приходящейся на единицу возмущающего воздействия F (t):
 .
.
В нашем случае

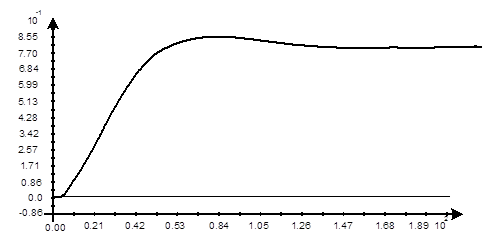
Рис.7 Переходная функция по управляющему воздействию САР температуры приточного воздуха в картофелехранилище.
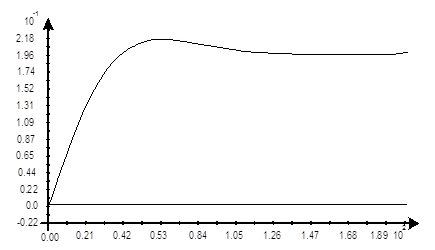
Рис.8 Переходная функция по возмущающему воздействию САР температуры приточного воздуха в картофелехранилище.
Быстродействие системы оценивается временем регулирования. Время регулирования  определяется как интервал времени от начала переходной функции до момента, когда отклонение выходной величины от ее нового установившегося значения становится меньше определенной достаточно малой величины ∆:
определяется как интервал времени от начала переходной функции до момента, когда отклонение выходной величины от ее нового установившегося значения становится меньше определенной достаточно малой величины ∆:
 .
.
Примем 
В нашем случае для переходной функции по возмущающему воздействию:
 ;
;  с (рис.5).
с (рис.5).
Для переходной функции по управляющему воздействию:
 ;
;  с (Рис.6).
с (Рис.6).
Колебательность переходного процесса определяется числом N перерегулирований для переходной функции по управляющему воздействию или числом колебаний N для переходной функции по возмущающему воздействию за время переходного процесса. В нашем случае N=1.
Перерегулирование и максимальное отклонение регулируемой величины от установившегося значения также служат оценкой колебательности.
Для переходного процесса по управляющему воздействию (рис.5):

Для переходного процесса по возмущающему воздействию (Рис.6):

Статическая ошибка по возмущающему воздействию:

По результатам выполнения этого раздела для САР температуры приточного воздуха в картофелехранилище, следует сделать следующие выводы:
Для рассмотренной системы перерегулирование составляет 11%, число перерегулирований и колебаний системы за время переходного процесса N=2. Качество системы по этим показателям следует считать удовлетворительным.
Время регулирования составляет около  с, максимальное отклонение регулируемой величины от ее установившегося значения, приходящееся на единицу ступенчатого возмущающего воздействия, составляет
с, максимальное отклонение регулируемой величины от ее установившегося значения, приходящееся на единицу ступенчатого возмущающего воздействия, составляет  , колебательность системы около 0,05, изменение статической ошибки системы при изменении задающего воздействия и возмущающего воздействия составляет 2% от изменения этих воздействий.
, колебательность системы около 0,05, изменение статической ошибки системы при изменении задающего воздействия и возмущающего воздействия составляет 2% от изменения этих воздействий.
Общие выводы по работе
Объектом управления САР температуры приточного воздуха в картофелехранилище, является канал приточного воздуха.
Управляющим воздействием на объект является степень смешивания холодного и регулирующего воздуха. Основное возмущающее воздействие -изменения температуры наружного воздуха. Закон регулирования системы интегральный. Система устойчива. Система является астатической.
Прямые оценки показателей качества управления следующие: перерегулирование  , число перерегулирований N=2, что удовлетворяет требованиям и свидетельствует о достаточном запасе устойчивости.
, число перерегулирований N=2, что удовлетворяет требованиям и свидетельствует о достаточном запасе устойчивости.
Время регулирования  с, максимальное отклонение регулируемой величины от её установившегося режима приходящееся на единицу ступенчатого возмущения равно
с, максимальное отклонение регулируемой величины от её установившегося режима приходящееся на единицу ступенчатого возмущения равно  , колебательность системы равна 0,05. Качество системы следует считать удовлетворительным.
, колебательность системы равна 0,05. Качество системы следует считать удовлетворительным.
Литература
1. Юревич Е.Н. Теория автоматического управления. - Л.: Энергия, 1975. - 416с
2. Бородин И.Ф., Кирилин Н.И. Основы автоматики и автоматизации производственных процессов. - М.: Колос, 1977. - 328с.
3. Теория автоматического управления. Ч.1. / Н.А. Бабанов, А.А. Воронов и др. - М.: Высш шк., 1986. - 367с.
4. Солодовников В.В., Плотников В.Н., Яковлев А.В. Основы теории и элементы систем автоматического регулирования. - М.: Машиностроение, 1985. - 536с.
5. Средства автоматики и телемеханики. / Н.И. Бохан, И.Ф. Бородин, Ю.В. Дробышев, С.Н. Фурсенко, А.А. Герасенков. - М.: Агропромиздат, 1992. -351с.
6. Бородин И.Ф. Технические средства автоматики. - М.: Колос, 1982. - 303с.
7. Бохан Н.И., Фурунжиев Р.И. Основы автоматики и микропроцессорной техники. - Мн.: Ураджай, 1987. - 376с.
Дата: 2019-04-23, просмотров: 312.