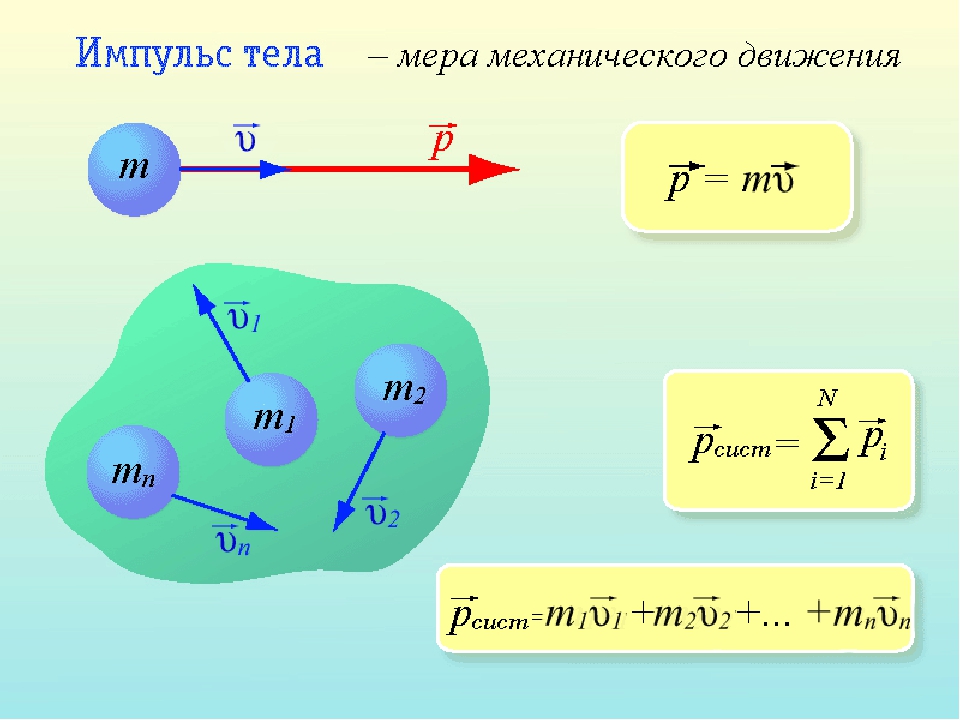
 Физическая величина, равная произведению массы тела на скорость его движения, называется импульсом тела (или количеством движения). Импульс тела – векторная величина. Единицей измерения импульса в СИ является кг·м/с. Направление импульса тела совпадает с направлением скорости движения тела.
Физическая величина, равная произведению массы тела на скорость его движения, называется импульсом тела (или количеством движения). Импульс тела – векторная величина. Единицей измерения импульса в СИ является кг·м/с. Направление импульса тела совпадает с направлением скорости движения тела.
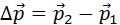 Изменение импульса тела
Изменение импульса тела
 При абсолютно неупругом ударе при абсолютно упругом ударе
При абсолютно неупругом ударе при абсолютно упругом ударе
Δ p = mυ 0 Δ p = 2 mυ 0
 Импульс силы – векторная физическая величина, которая одновременно учитывает влияние модуля, направления и времени действия силы на изменение состояния движения тела.
Импульс силы – векторная физическая величина, которая одновременно учитывает влияние модуля, направления и времени действия силы на изменение состояния движения тела.
· Вектор изменения импульса тела Δ p направлен по направлению действующей силы F
Суммарный (полный) импульс системы тел – векторная сумма импульсов всех тел.
p = mυ1 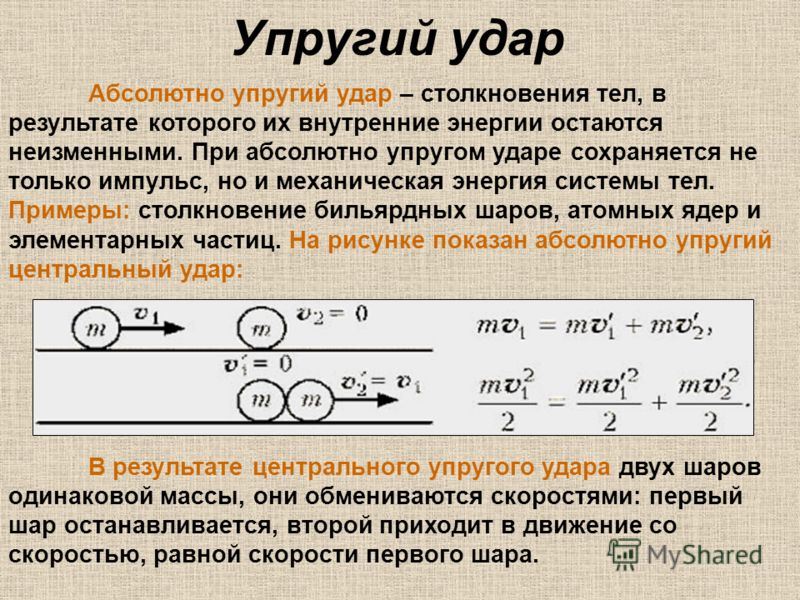
p = p1 + p2
 p =
p =  p12 + p22
p12 + p22
p = p1 – p2
 p = p 1 – p 2
p = p 1 – p 2
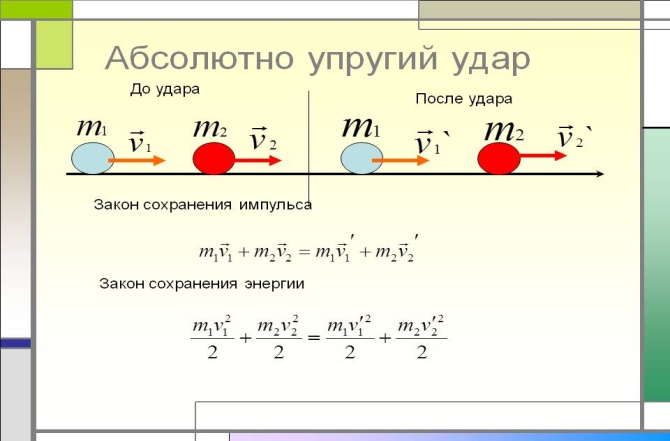
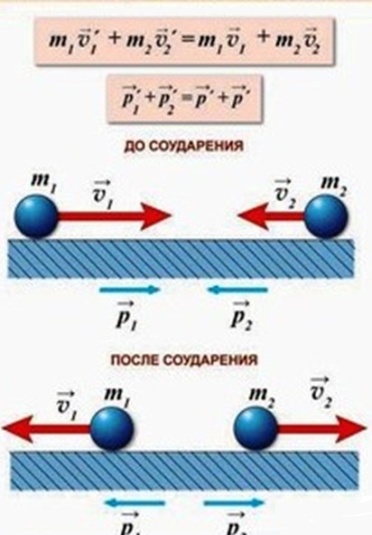
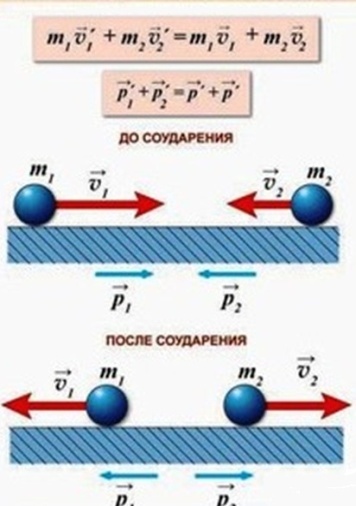
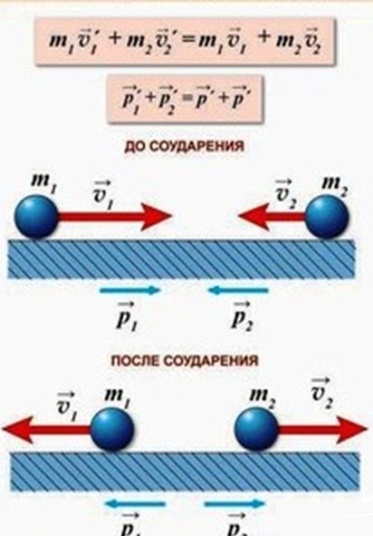
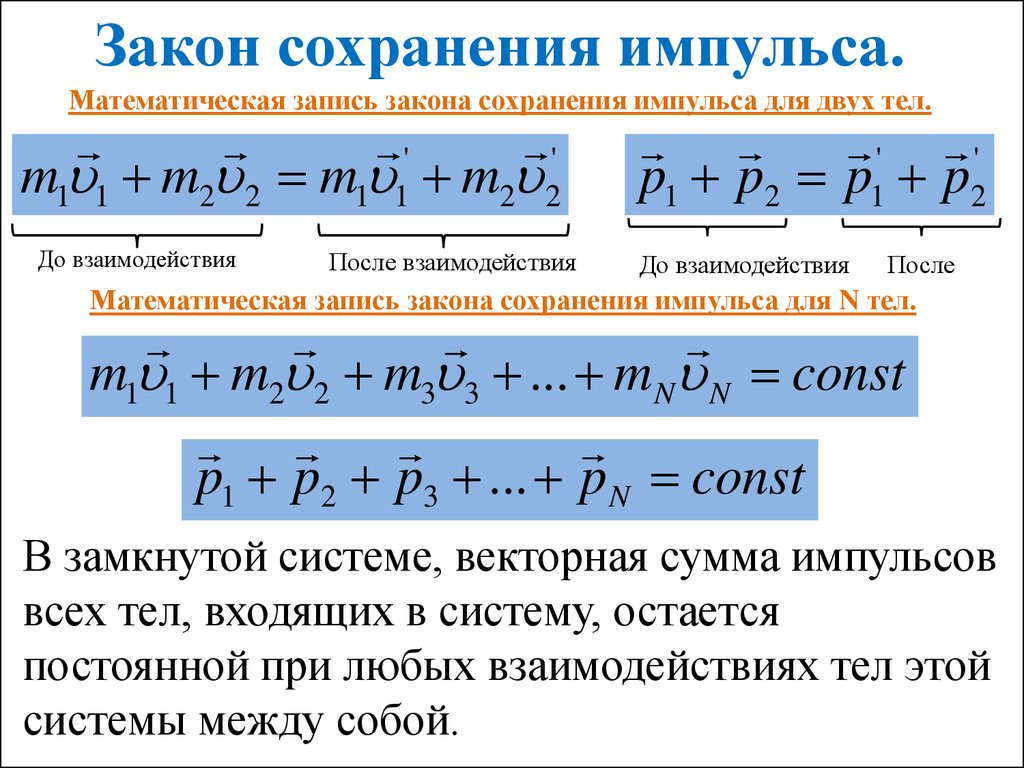 Закон сохранения импульса: геометрическая сумма импульсов тел в замкнутой системе до взаимодействия равна сумме импульсов тел после взаимодействия
Закон сохранения импульса: геометрическая сумма импульсов тел в замкнутой системе до взаимодействия равна сумме импульсов тел после взаимодействия
Система тел называется замкнутой, если взаимодействующие между собой тела не взаимодействуют с другими телами.
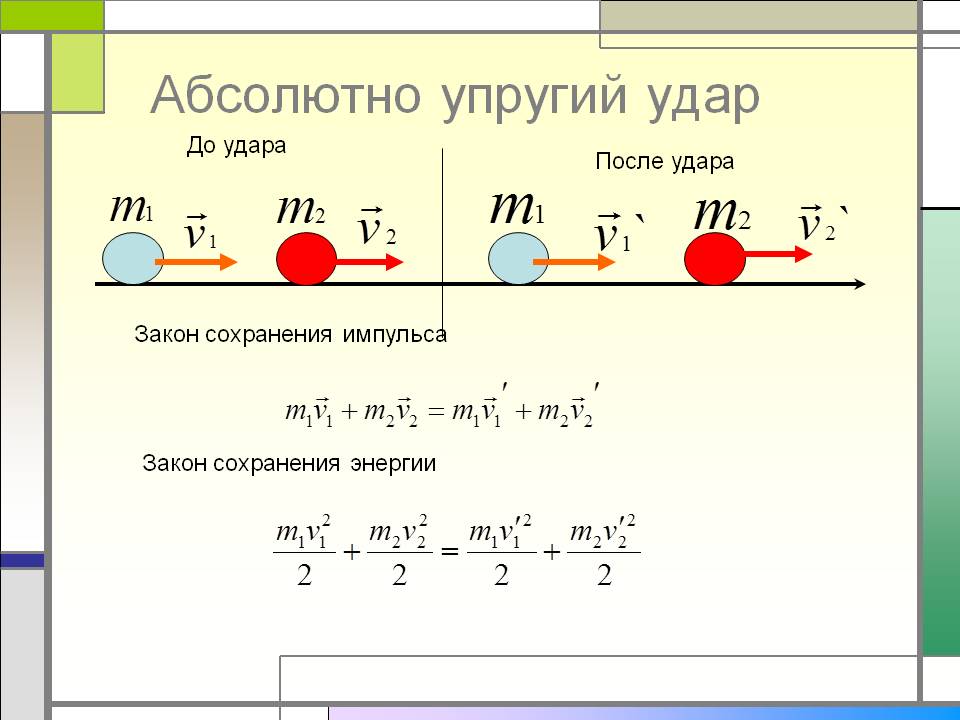
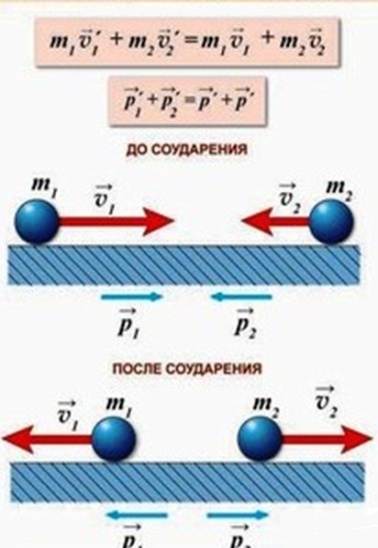
 Упругое взаимодействие – столкновения тел, в результате которого они движутся в разные стороны, их внутренние энергии остаются неизменными. При абсолютно упругом ударе сохраняется не только импульс, но и механическая энергия системы тел.
Упругое взаимодействие – столкновения тел, в результате которого они движутся в разные стороны, их внутренние энергии остаются неизменными. При абсолютно упругом ударе сохраняется не только импульс, но и механическая энергия системы тел.
· В результате упругого удара тела с одинаковой массой m1 = m2, движущиеся навстречу друг другу, обмениваются скоростями
· Если шар, движущийся со скоростью υ1, сталкивается с неподвижным шаром такой же массы, то первый шар остановится, а второй шар будет двигаться со скоростью υ1.
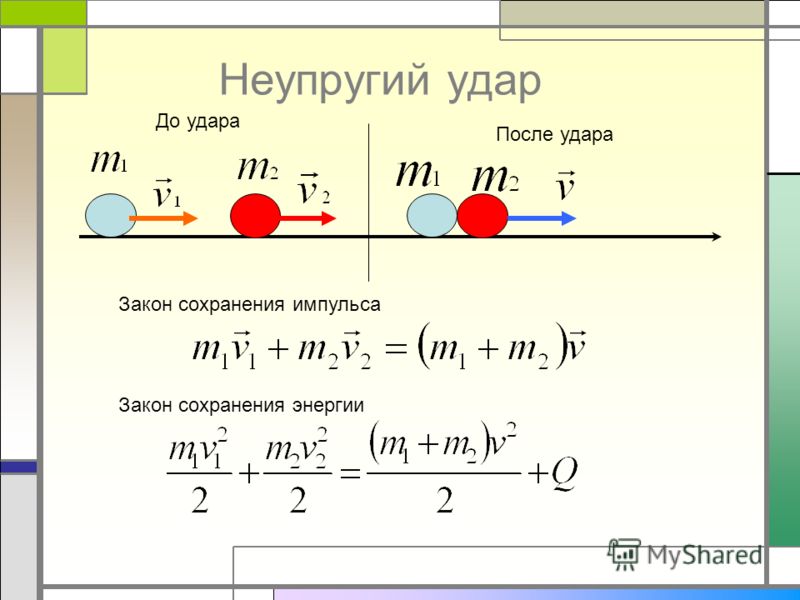 Неупругий удар – столкновение тел, в результате которого они соединяются вместе и движутся дальше как единое целое.
Неупругий удар – столкновение тел, в результате которого они соединяются вместе и движутся дальше как единое целое.
При неупругом ударе часть механической энергии взаимодействующих тел переходит во внутреннюю, импульс системы сохраняется.
· При неупругом ударе тел, движущихся навстречу друг другу, скорость совместного движения тел будет направлена в сторону движения тела с большим импульсом.
Механические колебания
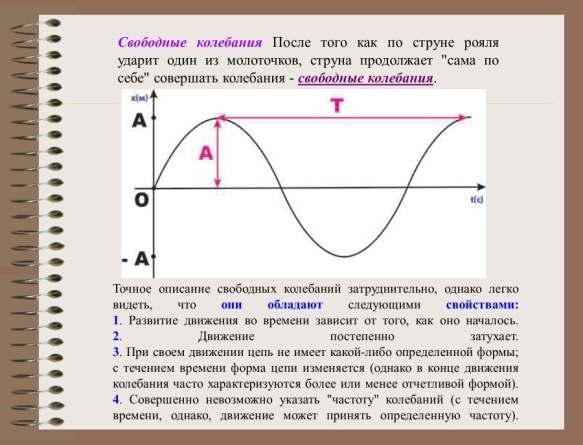
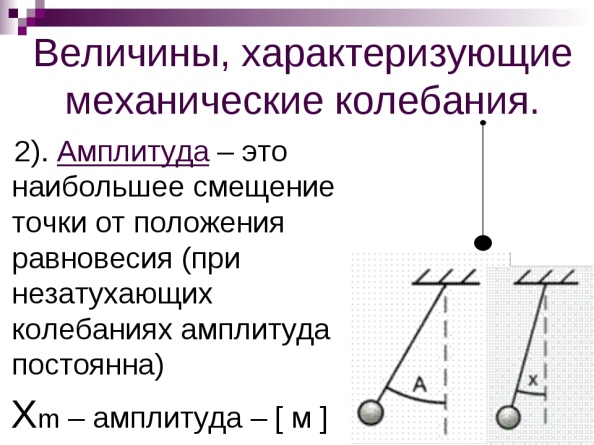 Механические колебания — это механическое движение тела или системы тел, которое обладает повторяемостью во времени. Амплитуда колебаний тела — это величина его наибольшего отклонения от положения равновесия. Период колебаний T — это время одного полного колебания. Можно сказать, что за период тело проходит путь в четыре амплитуды. Частота колебаний ν — это величина, обратная периоду: ν = 1/T. Частота измеряется в герцах (Гц) и показывает, сколько полных колебаний совершается за одну секунду.
Механические колебания — это механическое движение тела или системы тел, которое обладает повторяемостью во времени. Амплитуда колебаний тела — это величина его наибольшего отклонения от положения равновесия. Период колебаний T — это время одного полного колебания. Можно сказать, что за период тело проходит путь в четыре амплитуды. Частота колебаний ν — это величина, обратная периоду: ν = 1/T. Частота измеряется в герцах (Гц) и показывает, сколько полных колебаний совершается за одну секунду.
 Гармонические колебания — это колебания, при которых координата зависит от времени по гармоническому закону: x = A cos(ωt + α). Аргумент косинуса ωt+α называется фазой колебаний. Величина α, равная значению фазы при t = 0, называется начальной фазой. Начальная фаза отвечает начальной координате тела: x0 = A cos α.
Гармонические колебания — это колебания, при которых координата зависит от времени по гармоническому закону: x = A cos(ωt + α). Аргумент косинуса ωt+α называется фазой колебаний. Величина α, равная значению фазы при t = 0, называется начальной фазой. Начальная фаза отвечает начальной координате тела: x0 = A cos α.
Величина ω называется циклической частотой. Одному полному колебанию отвечает приращение фазы, равное 2π радиан: ωT = 2π, откуда ω = 2π/ T , ω = 2πν . Измеряется циклическая частота в рад/с (радиан в секунду).
· Путь, пройденный телом за 1 период, равен 4 амплитудам. S = 4A
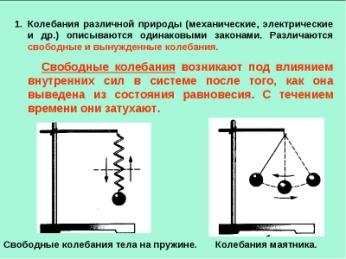
Тело совершает свободные колебания, если оно однократно выведено из положения равновесия и в дальнейшем предоставлено сама себе. Никаких периодических внешних воздействий тело при этом не испытывает, и никаких внутренних источников энергии, поддерживающих колебания, нет.
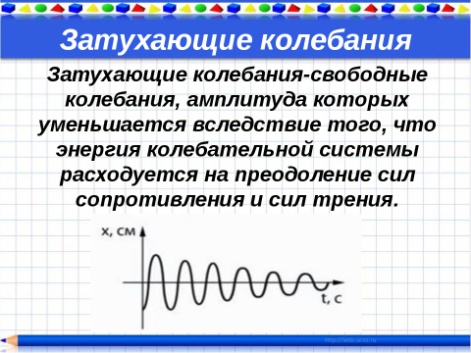 При отсутствии трения свободные колебания являются незатухающими, т. е. имеют постоянную амплитуду и длятся неограниченно долго. В реальных колебательных системах всегда присутствует трение, поэтому свободные колебания постепенно затухают.
При отсутствии трения свободные колебания являются незатухающими, т. е. имеют постоянную амплитуду и длятся неограниченно долго. В реальных колебательных системах всегда присутствует трение, поэтому свободные колебания постепенно затухают.
 Вынужденные колебания — это колебания, совершаемые системой под воздействием внешней силы F(t), периодически изменяющейся во времени (так называемой вынуждающей силы).
Вынужденные колебания — это колебания, совершаемые системой под воздействием внешней силы F(t), периодически изменяющейся во времени (так называемой вынуждающей силы).
Математический маятник — это небольшое тело, подвешенное на невесомой нерастяжимой нити. Математический маятник может совершать колебания в вертикальной плоскости в поле силы тяжести. Циклическая частота колебаний математического маятника равна: ω=  . Период колебаний математического маятника: T = 2π
. Период колебаний математического маятника: T = 2π 
· Период математического маятника не зависит от массы маятника и амплитуды колебаний.
· Чем короче длина маятника, тем меньше период колебаний.
· T =2 π  период маятника, движущегося вниз с ускорением а
период маятника, движущегося вниз с ускорением а
· T =2 π  период маятника, движущегося вверх с ускорением а
период маятника, движущегося вверх с ускорением а
· В невесомости математический маятник колебаться не будет, т.к сила тяжести равна нулю.
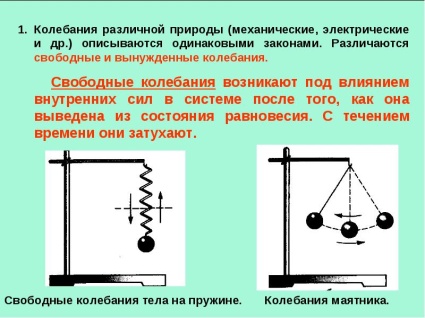 Пружинный маятник — это закреплённый на пружине груз, способный совершать колебания в горизонтальном или вертикальном направлении Циклическая частота колебаний пружинного маятника, таким образом, равна: ω=
Пружинный маятник — это закреплённый на пружине груз, способный совершать колебания в горизонтальном или вертикальном направлении Циклическая частота колебаний пружинного маятника, таким образом, равна: ω=  Отсюда и из соотношения T = 2π/ω находим период горизонтальных колебаний пружинного маятника: T = 2π
Отсюда и из соотношения T = 2π/ω находим период горизонтальных колебаний пружинного маятника: T = 2π 
· Если две пружины соединены параллельно, то kобщ =k1 + k2 ⇒ T = 2π 
· Если две пружины соединяются последовательно, то  ⇒ T = 2π
⇒ T = 2π 
· Период пружинного маятника и на Земле, и в космическом корабле, летящем с постоянной скоростью, будет одинаков
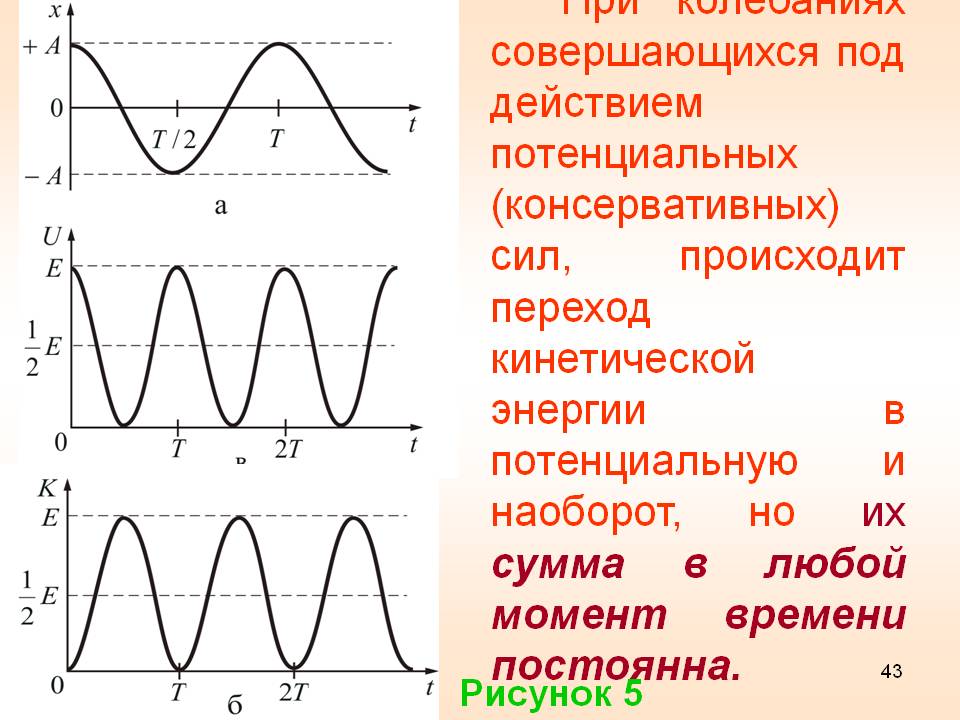 Период колебаний энергии в два раза меньше периода колебаний координаты Тэн =
Период колебаний энергии в два раза меньше периода колебаний координаты Тэн = 
Частота колебаний энергии в 2 раза больше частоты колебаний координаты ѵэн = 2ѵк
Полная энергия колебаний не зависит от времени, остаётся величиной постоянной Е = Ек + Еп = const
E = kx 2 /2 + mυ 2 /2 = kA 2 /2 = mυ 2 мах /2
· Если нет сил трения и сопротивления, то полная энергия остаётся постоянной
· За период Ек и Еп 4 раза принимают равные значения.
· Через t =  в первый раз Ек = Еп
в первый раз Ек = Еп
· Период изменения энергии пропорционален периоду колебаний энергии, если период колебаний координаты увеличивается, то увеличивается период изменения энергии.
· Если пружина маятника всё время остаётся растянутой, то при движении груза вверх к положению равновесия потенциальная энергия в поле тяжести увеличивается (h- увеличивается), кинетическая энергия увеличивается (скорость увеличивается), потенциальная энергия пружины уменьшается (х – уменьшается)
· При движении вниз от положения равновесия скорость уменьшается ⇒ Ек – уменьшается, высота уменьшается ⇒ Еп – уменьшается, деформация пружины увеличивается, ⇒ Епруж увеличивается
· При движении вверх от положения равновесия скорость уменьшается ⇒ Ек – уменьшается, высота увеличивается ⇒ Еп – увеличивается, деформация пружины уменьшается ⇒ Епруж – уменьшается
Дата: 2019-04-22, просмотров: 1914.