Введение
В общем случае система автоматического управления независимо от физической природы объекта управления содержит следующие функциональные устройства:
- средства сбора информации о состоянии объекта управления и текущих параметрах технологического процесса; это различные датчики и измерительные преобразователи, которые рассматриваются в курсе «Технические измерения и приборы»;
- устройства для передачи сигналов датчиков, к которым относятся нормирующие преобразователи, магистральные усилители, интерфейсы, а также система мультиплексор - демультиплексор;
- устройства для обработки и преобразования сигналов по их виду, частотному спектру и амплитудному диапазону;
- регуляторы, формирующие необходимый закон управления объектом;
- исполнительные механизмы, отрабатывающие заданный закон управления;
- регулирующие органы, непосредственно воздействующие на объект управления;
- средства отображения информации для визуального отсчета или регистрации текущих параметров объекта и хода технологического процесса;
- вспомогательные устройства, обеспечивающие функционирование средств автоматизации, к которым относятся стабилизаторы напряжения и тока, генератора нормированных сигналов, задающие устройства, инверторы и др.
Большинство из перечисленных устройств являются типовыми и выпускаются промышленностью, например, агрегированные комплексы средств автоматизации (регуляторы, исполнительные механизмы, регулирующие органы).
Ряд же функциональных устройств может выполняться на основе интегральных микросхем с дополнительными элементами, как специальные узлы систем управления. В настоящее время электронная промышленность освоила производство интегральных микросхем с заданными пользователем свойствами, которые могут выполнять совокупность функций типовых устройств. Это расширяет возможность разработчиков при создании надежных и эффективных средств автоматизации.
Изучение дисциплины «Технические средства автоматизации» позволяет грамотно составить техническое задание на изготовление таких интегральных микросхем, а также осуществлять рациональный выбор типовых средств автоматизации, производить их монтаж, наладку и эксплуатацию.
Глава 1. Устройства для обработки и преобразования
аналоговых сигналов
Аналоговые компараторы
Компаратор – это устройство для сравнения 2-х сигналов.
Общий принцип действия: если в процессе изменения входных сигналов один превышает другой, то компаратор меняет свое состояние на противоположное. Чаще один из входных сигналов имеет заданное фиксированное значение. Это опорный сигнал  , который определяет уровень срабатывания компаратора. Другой входной сигнал
, который определяет уровень срабатывания компаратора. Другой входной сигнал  может меняться. Выходной сигнал
может меняться. Выходной сигнал  имеет два уровня: логический 0 или логическая 1, совместимые с сериями типовыми цифровых ИС. В процессе работы компаратор может перестраиваться на различные уровни срабатывания за счет изменения опорного сигнала вручную или автоматически.
имеет два уровня: логический 0 или логическая 1, совместимые с сериями типовыми цифровых ИС. В процессе работы компаратор может перестраиваться на различные уровни срабатывания за счет изменения опорного сигнала вручную или автоматически.
Применение: позиционные регуляторы, сигнализаторы, устройства сортировки на 2-3 группы (норма, меньше, больше), преобразователи напряжение – частота, системы импульсно-фазового управления, аналого-цифровые преобразователи (АЦП).
Существует три разновидности компараторов: однопороговый, регенеративный и двухпороговый. Компаратор может выполнятся на основе операционного усилителя (ОУ) с внешними цепями, а также в виде специальных интегральных схем (ИС), имеющих повышенное быстродействие, например, типа: К521СА3, К597СА1, К544СА2
Однопороговый компаратор
Схема компаратора на основе ОУ приведена на рисунке 1.1
Рис. 1.1. Однопороговый компаратор
Назначение элементов.
Резисторы  ,
,  служат для выравнивания входных токов ОУ при отсутствии или равенстве входных сигналов и уменьшения погрешности срабатывания за счет уменьшения напряжения смещения нуля
служат для выравнивания входных токов ОУ при отсутствии или равенстве входных сигналов и уменьшения погрешности срабатывания за счет уменьшения напряжения смещения нуля  . Обычно = .
. Обычно = .
При использовании ОУ на полевых транзисторах и отсутствуют. Резистор  обеспечивает номинальный ток стабилизации стабилитрона VD1.
обеспечивает номинальный ток стабилизации стабилитрона VD1.
Резистор  служит для согласования по сопротивлению компаратора с последующими элементами ТТЛ, ≤ 400 Ом (определяется отношением
служит для согласования по сопротивлению компаратора с последующими элементами ТТЛ, ≤ 400 Ом (определяется отношением  ). С одной стороны нужно уменьшать, но при этом загружается ОУ.
). С одной стороны нужно уменьшать, но при этом загружается ОУ.
Потенциометр  является «задатчиком», преобразуя напряжение
является «задатчиком», преобразуя напряжение  питания в задаваемое опорного напряжение
питания в задаваемое опорного напряжение  .
.
Стабилитрон VD1 задает уровень логической «1» на выходе компаратора.
Диод VD2 исключает «отрицательное» напряжение на выходе компаратора.
ОУ DA1 обеспечивает сравнение сигналов  и и повышает точность компаратора.
и и повышает точность компаратора.
На рис. 1.2. представлена статическая характеристика компаратора - зависимость напряжения на выходе от напряжения на входе устройства.
Рис. 1.2. Статическая характеристика компаратора 
Принцип действия компаратора:
1) Если входное напряжение находится в пределах  , то напряжение ОУ максимально и положительно
, то напряжение ОУ максимально и положительно  за счет положительного опорного напряжения +
за счет положительного опорного напряжения +  и большого коэффициента усиления Ku. Диод VD2 открыт и выходное напряжение компаратора соответствует логической единице
и большого коэффициента усиления Ku. Диод VD2 открыт и выходное напряжение компаратора соответствует логической единице  ;
;
2) При достижении  происходит переключение ОУ за счет смены знака разности напряжений на входе ОУ и инвертирования этой разности
происходит переключение ОУ за счет смены знака разности напряжений на входе ОУ и инвертирования этой разности  . Диод VD2 закрывается и выходное напряжение компаратора становится близким к нулю
. Диод VD2 закрывается и выходное напряжение компаратора становится близким к нулю  ≈ 0.
≈ 0.
Точность компаратора характеризируется порогом чувствительности  (где
(где  – фактическое напряжение на входе при переключении) и определяется алгебраической суммой четырех составляющих.
– фактическое напряжение на входе при переключении) и определяется алгебраической суммой четырех составляющих.
 ,
,
где  - напряжение смещения нуля ОУ;
- напряжение смещения нуля ОУ;
 - температурный дрейф напряжения ;
- температурный дрейф напряжения ;
 - временной дрейф напряжения .
- временной дрейф напряжения .
Практический порог чувствительности компаратора на типовом ОУ составляет  = 1-5 мВ. Компенсация составляющих осуществляется: – настройкой ОУ с помощью дополнительного потенциометра;
= 1-5 мВ. Компенсация составляющих осуществляется: – настройкой ОУ с помощью дополнительного потенциометра;  - применением терморезисторов; выбором большого Ku.
- применением терморезисторов; выбором большого Ku.
Временной дрейф напряжения - компенсировать нельзя, так как он имеет случайный характер.
Быстродействие компаратора определяется временем восстановления  - это часть времени переходного процесса, при котором выходной сигнал
- это часть времени переходного процесса, при котором выходной сигнал  достигает величины порога срабатывания ТТЛ (
достигает величины порога срабатывания ТТЛ (  ≈ 1,5В). При этом между входами подается нормированный перепад напряжений
≈ 1,5В). При этом между входами подается нормированный перепад напряжений  = 5 мВ (рис. 1.3.). Время восстановления
= 5 мВ (рис. 1.3.). Время восстановления  зависит от полосы пропускания частот ОУ и емкости нагрузки C н.
зависит от полосы пропускания частот ОУ и емкости нагрузки C н.
Рис. 1.3. Определение времени восстановления
Практически  = 5
= 5  50 мкс (для компараторов на ОУ). В специализированных компараторах на ИС
50 мкс (для компараторов на ОУ). В специализированных компараторах на ИС  ≤ 10 нс.
≤ 10 нс.
Преимущества компаратора на ОУ: малое потребление тока и дополнительные функциональные возможности, высокая точность переключения. Недостатки – меньшее быстродействие.
Регенеративный компаратор (РК)
Отличительная особенность регенеративного компаратора (рис. 1.4.) – введение цепи положительной обратной связи (ПОС) посредством резистора  и диода VD3.
и диода VD3.
Рис. 1.4. Регенеративный компаратор
Принцип действия РК
Исходное состояние:
 = 0
= 0
При увеличении напряжения переключение регенеративного компаратора произойдет тогда, когда входное напряжение превысит не только напряжение  , но и сигнал ПОС. При этом часть выходного сигнала подается на н-вход ОУ и складывается с опорным напряжением U оп.
, но и сигнал ПОС. При этом часть выходного сигнала подается на н-вход ОУ и складывается с опорным напряжением U оп.
Это напряжение соответствует верхнему порогу переключения
 .
.
За счет действия ПОС процесс переключения регенеративного компаратора происходит лавинообразно. После переключения, когда  выходной сигнал компаратора близок к нулю
выходной сигнал компаратора близок к нулю  .
.
При этом сигнал ПОС исчезает. В связи с этим обратное переключение компаратора при уменьшении напряжения произойдет без учета действия ПОС, как у однопорогового при =  .
.
 = – нижний порог переключения.
= – нижний порог переключения.
Обратное переключение происходит также лавинообразно и регенеративный компаратор переходит в исходное состояние, то есть  при
при  ≤
≤  .
.
Таким образом, статическая характеристика регенеративного компаратора имеет гистерезис (рис. 1.5.) или зону переключения, которая определяется выражением:
 .
.
Зона переключения регенеративного компаратора при перестройке на различные уровни срабатывания не остается постоянной, а уменьшается с увеличением . Это является недостатком схемы регенеративного компаратора и требует дополнительных настроек при необходимости сохранения зоны переключения путем изменения сопротивления  .
.
Особенности применения регенеративного компаратора.
Быстродействие регенеративного компаратора выше чем у однопорогового компаратора, причем время переключения не зависит от скорости изменения входного сигнала. Поэтому регенеративный компаратор целесообразно применять на низких частотах или очень малых скоростях изменения входного напряжения .
Гистерезис статической характеристики регенеративного компаратора позволяет исключить влияние помехи. Для этого зона переключения выбирается больше двойной амплитуды помехи (  > 2
> 2  ).
).
Рис. 1.5 Статическая характеристика регенеративного компаратора
Двухпороговый компаратор (ДК).
Состояние двухпорогового компаратора изменяется два раза при увеличении входного напряжения . Его можно построить на основе двух однопороговых компараторов с разной настройкой при объединении их сигнальных входов.
Существует схема двухпорогового компаратора на основе одного ОУ (рис. 1.6.).
Рис. 1.6
Рис. 1.7
Назначение элементов.
Резисторы  ,
,  обеспечивает вычитание напряжений и . С этой целью знаки и
обеспечивает вычитание напряжений и . С этой целью знаки и  берутся разными.
берутся разными.
 обеспечивает выравнивание входных токов ОУ, для уменьшения напряжения U см и повышения точности ДК. Сопротивление выбирается из условия:
обеспечивает выравнивание входных токов ОУ, для уменьшения напряжения U см и повышения точности ДК. Сопротивление выбирается из условия:
 , при =
, при =  ; = 0,5 .
; = 0,5 .
 ,
,  ограничивает ток в цепи ОС.
ограничивает ток в цепи ОС.
Диоды VD1 – VD4 образуют нелинейную цепь ООС с дополнительными источниками напряжения смещения  и
и  , которые определяют пороги переключения компаратора.
, которые определяют пороги переключения компаратора.
Нижний порог 
Верхний порог 
 – прямое падение напряжения на диоде.
– прямое падение напряжения на диоде.
= 0,6 – 0,7 В (Si).
Зона переключения двухпорогового компаратора.
 ; при = , =
; при = , =  .
.
Эта зона не зависит от опорного напряжения  .
.
Настройка зоны переключения практически осуществляется изменением сопротивлений и в цепи смещения.
Принцип действия ДК.
При 
VD4, VD1 – открыты
VD2, VD3 – закрыты. Цепь ООС оборвана. Действует максимальный коэффициент усиления ОУ.
Кu = К0
 =
= 
При 
VD4, VD1 – закрыты
VD2, VD3 – открыты. Цепь ООС также оборвана
= – 
При 
Все диоды открыты. Создается глубокая ООС и коэффициент усиления  близок к нулю:
близок к нулю:
Применение двухпорогового компаратора.
ДК может использоваться как 3-х позиционный регулятор и сигнализатор технологических параметров, а также для сортировки деталей по 3-м размерным группам: «меньше – норма – больше».
Модуляторы – демодуляторы
Модуляторы – демодуляторы применяются в измерительных и преобразовательных устройствах для обработки аналоговых слаботочных сигналов. При этом демодулятор (ДМ) служит для фазочувствительного выпрямления сигналов переменного тока и используется в измерительных устройствах с индуктивными, фотоэлектрическими, тензорезисторными датчиками (преобразователями). Особенность ДМ – изменение знака выходного напряжения при изменении фазы входного сигнала. Это необходимо для регистрации направления перемещения рабочих органов. В обычных мостовых выпрямителях знак напряжения постоянный и не зависит от фазы входного сигнала.
В настоящее время модулятор и демодулятор строятся на основании ОУ. Это позволяет увеличить точность преобразования, повысить  , уменьшить
, уменьшить  , получить усиление сигнала в широком линейном диапазоне
, получить усиление сигнала в широком линейном диапазоне  . Ранее применялись для этих целей мостовые диодные схемы, которые назывались кольцевой демодулятор.
. Ранее применялись для этих целей мостовые диодные схемы, которые назывались кольцевой демодулятор.
Основная схема демодулятора приведена на рис. 1.8.
Рис. 1.8
Схема содержит:
ОУ DA1, который обязательно выполняется на полевых транзисторах.
 ,
,  образуют цепь ООС, причем = .
образуют цепь ООС, причем = .
ограничивает ток, коммутируемый ключом  и повышает .
и повышает .
Ключ периодически замыкается на частоте входного сигнала синхронно с ним в течение одного полупериода. – биполярный или полевой транзисторы в ключевом режиме (рис. 1.9).
Рис. 1.9
Когда ключ замыкается, ОУ работает как инвертор, повторяет величину U входа, но меняет его знак. В этом случае
Сигнал через положительный вход не проходит.
Когда ключ разомкнут (второй полупериод), схема работает как повторитель.
В результате на выходе из переменного напряжения получаем однополярное пульсирующее напряжение  .
.
Фаза α = 0 Фаза α = π
Рис. 1.10
Работа ключа не зависит от фазы , поэтому на выходе получаем изменение знака при смене фазы .
Полевой транзистор на входе ОУ необходим, чтобы не изменялся ток на положительном входе при замыкании или размыкании ключа, что будет наблюдаться при использовании биполярного транзистора на входе. Изменение  вызывает появление ложного выходного сигнала.
вызывает появление ложного выходного сигнала.
Недостатки схемы:
1. Отсутствие усиления входного сигнала ( = )
2. Неодинаковое в соседних полупериодах входного сигнала из-за замкнутого и разомкнутого состояний .. Существует схема демодулятора с двумя ключами, обеспечивающая постоянное значение для соседних полупериодов.
Для получения КU > 1 необходимо выполнить два условия:
1. >
2. Выровнять КU для соседних полупериодов. Для этого используют дополнительный резистор  (рис. 1.11).
(рис. 1.11).
Рис. 1.11
Пусть = 
Для случая  = 1 получаем
= 1 получаем  = ∞ , то есть резистор
= ∞ , то есть резистор  отсутствовует, что соответствует предыдущей схеме (рис. 1.10).
отсутствовует, что соответствует предыдущей схеме (рис. 1.10).
Модулятор. Рассматриваемые схемы используются в качестве модулятора входного сигнала, который обеспечивает преобразование постоянного входного напряжения  в переменное, фаза которого зависит от знака , а амплитуда определяется уровнем . Для этого на вход управления ключом подается переменное (прямоугольное)
в переменное, фаза которого зависит от знака , а амплитуда определяется уровнем . Для этого на вход управления ключом подается переменное (прямоугольное)  с частотой модуляции, а на информационный вход – сигнал неизменный или медленно меняющийся любого знака.
с частотой модуляции, а на информационный вход – сигнал неизменный или медленно меняющийся любого знака.
Рис. 1.12
По аналогии с ДМ в соседних полупериодах работы ключа SI меняется знак выходного напряжения, в результате чего получается на выходе модулятора переменное напряжение прямоугольной формы, у которого амплитуда и фаза соответствует уровню входного напряжения .
Совместно модулятор и демодулятор используют в специальном ОУ типа МДМ, в котором усиление осуществляется на переменном токе с использованием разделительных конденсаторов. В связи с этим этот ОУ имеет малое напряжение смещения нуля и малый дрейф при высоком коэффициенте усиления (  = 106).
= 106).
Амплитудные детекторы
Амплитудный детектор (АД) предназначен для запоминания экстремальных значений входного сигнала. Другое название этого устройства:
Пик-детектор. Назначение элементов схемы (рис. 1.13): DA1 обеспечивает необходимую линейность статической характеристики за счет компенсации нелинейности диодов VD1 с глубокой ООС.
Диод VD1 исключает разряд заполняющего  через ОУ DA1.
через ОУ DA1.
Диод VD2 используют при входном сигнале переменного тока, а также для исключения насыщения ОУ DA1.
Конденсатор обеспечивает хранение экстремального значения входного сигнала.
Рис. 1.13
Ключ  для сброса заряда на конденсаторе в конце цикла хранения.
для сброса заряда на конденсаторе в конце цикла хранения.
DA2 – буферный ОУ, являющийся повторителем напряжения с большим входным сопротивлением  , согласует амплитудный детектор с нагрузкой, исключает разряд через нагрузку.
, согласует амплитудный детектор с нагрузкой, исключает разряд через нагрузку.
Сопротивление образует цепь ООС, а также ограничивает входной ток  ОУ DA1 при переходных процессах.
ОУ DA1 при переходных процессах.
При увеличении амплитудный детектор отслеживает текущее значение  и обеспечивает непрерывный заряд (рис 1.14). При дальнейшем уменьшении амплитудный детектор автоматически переходит в режим хранения сигнала
и обеспечивает непрерывный заряд (рис 1.14). При дальнейшем уменьшении амплитудный детектор автоматически переходит в режим хранения сигнала  . При этом VD1 закрывается, так как оказывается включенным в обратном направлении. За счет действия глубокой ООС компенсируются все сдвиги напряжений внутри контура, обеспечивается высокая линейность преобразователя (при нелинейности ВАХ VD1), и высокое быстродействие амплитудного детектора.
. При этом VD1 закрывается, так как оказывается включенным в обратном направлении. За счет действия глубокой ООС компенсируются все сдвиги напряжений внутри контура, обеспечивается высокая линейность преобразователя (при нелинейности ВАХ VD1), и высокое быстродействие амплитудного детектора.
Рис. 1.14
Погрешность амплитудного детектора в режиме хранения определяется степенью разряда конденсатора . Этот разряд может быть через следующие цепи:
VD1 – через  ,
,
- DA2;  - ;
- ;  -
-
Max -
При этом время полного разряда
При необходимости восстановления начальных условий подается сигнал сброса  на ключ (в конце цикла хранения).
на ключ (в конце цикла хранения).
Детекторы среднего значения
Детекторы среднего значения (ДСЗ) -это прецизионные выпрямители, постоянная составляющая выходного сигнала которых равна или пропорциональна среднему значению входного сигнала за каждый период. В отличие от обычного диодного выпрямителя ДСЗ может работать при малых входных сигналах (от нескольких мВ).
ДСЗ применяются в точных измерительных приборах (вольтметрах), преобразователях, детекторах модуля сигнала.
В ДСЗ диод VD1 (рис.1.15) вместе с ОУ охватывается глубокой ООС, что уменьшает влияние порогового напряжения VD1 и увеличивает линейность преобразователя.
Схема прецизионного диода
Рис.1.15 Рис. 1.16
Когда > 0, VD1 открыт, цепь ООС замкнута,  ;
;  . Порог открывания схемы
. Порог открывания схемы  ≤ 0,1 мВ. При < 0 VD1 закрыт,
≤ 0,1 мВ. При < 0 VD1 закрыт, 
 0.
0.
Статическая характеристика  линейна при > 0 (рис. 1.16).
линейна при > 0 (рис. 1.16).
.
Схема однополупериодного прецизионного выпрямителя с инвертирование и усилением входного сигнала представлена на рис. 1.17.
Недостатки предыдущей схемы: отсутствие усиления ; ограниченное быстродействие из-за большого времени рассасывания транзистора ОУ из-за токовых перегрузок.
Назначение элементов:  -
-  – цепь ООС;
– цепь ООС;  – для выравнивания входных токов ОУ, уменьшения
– для выравнивания входных токов ОУ, уменьшения  , увеличения точности.
, увеличения точности.
VD1 исключает отрицательное напряжение на выходе.
VD2 стабилитрон, ограничивающий уровень  ОУ, исключает насыщение выходных транзисторов и увеличивает быстродействие схемы.
ОУ, исключает насыщение выходных транзисторов и увеличивает быстродействие схемы.
Рис. 1.17
При большой глубине ОС выходное напряжение не зависит от  и порогового напряжения VD1, а определяется выражением
и порогового напряжения VD1, а определяется выражением
 при > 0 (рис.1.18)
при > 0 (рис.1.18)
Рис. 1.18
При построении двухполупериодных выпрямителей существует много вариантов схем. Для организации общего провода применяются 2–х каскадные схемы детекторов, которые усложняют устройства. Самая простая схема двухполупериодного прецизионного выпрямителя с «незаземленной» нагрузкой содержит мостовой выпрямитель в цепи ООС (рис.1.19).
Рис. 1.19
Ток нагрузки  имеет одно направление и не зависит от нагрузки
имеет одно направление и не зависит от нагрузки  . Схема является стабилизатором тока, так как в ней действует параллельно – последовательная ОС. Величина этого тока определяется уровнем входного сигнала
. Схема является стабилизатором тока, так как в ней действует параллельно – последовательная ОС. Величина этого тока определяется уровнем входного сигнала  . Схема применяется для аналоговых вольтметров переменного напряжения с линейной шкалой.
. Схема применяется для аналоговых вольтметров переменного напряжения с линейной шкалой.
Устройство выборки-хранения
Устройства выборки-хранения (УВХ) относятся к элементам аналоговой памяти и обеспечивают хранение в течение заданного времени мгновенного значения входного сигнала, выбранного в заданный момент времени. УВХ имеет два режима работы: выборка и хранение. В режиме выборки на вход управления подается импульсный сигнал  и осуществляется слежение за мгновенным значением в течение времени
и осуществляется слежение за мгновенным значением в течение времени  . По окончании импульса управления УВХ переходит в режим хранения. УВХ применяется в измерительной и преобразовательной технике, например, для быстродействующих фильтров инфранизких частот, преобразователей импульсного напряжения в постоянное. В настоящее время УВХ выпускаются в виде ИС типа Кр 1100СК2, которые построены по двухкаскадной схеме (рис.1.20).
. По окончании импульса управления УВХ переходит в режим хранения. УВХ применяется в измерительной и преобразовательной технике, например, для быстродействующих фильтров инфранизких частот, преобразователей импульсного напряжения в постоянное. В настоящее время УВХ выпускаются в виде ИС типа Кр 1100СК2, которые построены по двухкаскадной схеме (рис.1.20).
Назначение элементов схемы.
DA1 – ОУ, обеспечивающий согласование УВХ с источником входного сигнала и быстрый заряд  .
.
Ключ  на МОП – транзисторе, замыкающийся во время выборки по сигналу
на МОП – транзисторе, замыкающийся во время выборки по сигналу  .
.
– запоминающий конденсатор.
Буферный каскад на DA 2 повышает нагрузочную способность УВХ.
 образует цепь ООС и ограничивает входной ток DA1 в переходных режимах.
образует цепь ООС и ограничивает входной ток DA1 в переходных режимах.
Во время импульсов ключ замкнут и заряжается от мгновенного значения . Затем размыкается и на сохраняется напряжение до следующего импульса выборки. Для ускорения заряда в процессе выборки емкость  необходимо уменьшать.
необходимо уменьшать.

Для уменьшения погрешности в режиме хранения емкость необходимо увеличить.

Таким образом, условия достижения точности и быстродействия при выборе противоречивы.
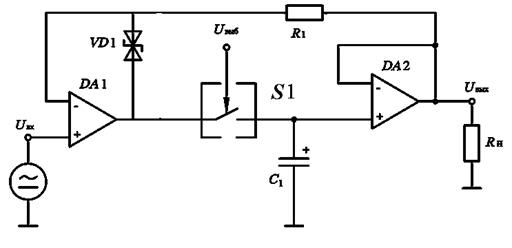
Рис. 1.20
На рис. 1.21 показаны диаграммы сигналов для примера применения УВХ, регистрирующего характер изменения амплитуды входного сигнала.
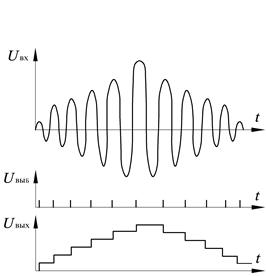
Рис. 1.21
В этом случае УВХ может использоваться, как сглаживающий фильтр, имеющий высокое быстродействие (tперех = T) и малый коэффициент пульсации. Параметры типового УВХ Кр 1100СК2: время выборки  = 10 мкс (при =1000 пФ), скорость спада напряжения
= 10 мкс (при =1000 пФ), скорость спада напряжения  в режиме хранения 5 мв/мс (при = 1000 пФ). Выбор при периодическом сигнале определяется из условия
в режиме хранения 5 мв/мс (при = 1000 пФ). Выбор при периодическом сигнале определяется из условия  .
.
Активные фильтры
Активные фильтры применяется в преобразовательных устройствах, когда требуется выделить полезный сигнал или подавить сигнал помехи в заданном частотном спектре. Кроме того, активные фильтры могут использоваться при синтезе корректирующих звеньев в САУ. Сейчас активные фильтры строятся на основании ОУ и  – элементов. По сравнению с пассивными фильтрами применение ОУ обеспечивает усиление полезного фильтруемого сигнала, но необходимо согласование, фильтра с источником сигнала и нагрузкой, что увеличивает точность и стабильность параметров фильтров. Максимально эффективно использование активных фильтров на низких частотах 1-1000 Гц. При этом можно исключить высокогабаритные катушки индуктивности с обеспечением необходимой крутизны АЧХ фильтра. Среди активных фильтров максимальное применение находят: ФНЧ – фильтр низких частот; ФВЧ, полосовые и заградительные фильтры.
– элементов. По сравнению с пассивными фильтрами применение ОУ обеспечивает усиление полезного фильтруемого сигнала, но необходимо согласование, фильтра с источником сигнала и нагрузкой, что увеличивает точность и стабильность параметров фильтров. Максимально эффективно использование активных фильтров на низких частотах 1-1000 Гц. При этом можно исключить высокогабаритные катушки индуктивности с обеспечением необходимой крутизны АЧХ фильтра. Среди активных фильтров максимальное применение находят: ФНЧ – фильтр низких частот; ФВЧ, полосовые и заградительные фильтры.
ФНЧ 1-го порядка
Рис. 1.24
 ;
;  ;
; 
ЛАЧХ
Рис. 1.25
Для сравнения: пассивный ФНЧ 1-го порядка
Рис. 1.26
При практической реализации будет иметь ЛАЧХ отличную от теоретической из-за влияния сопротивления источника сигнала и сопротивления нагрузки.
ФВЧ 1-го порядка
Рис. 1.27

Рис. 1.28
При конкретных указанных значениях  , в котором меняется коэффициент передачи БСП.
, в котором меняется коэффициент передачи БСП.
Полосовой фильтр можно получить последовательным соединением ФНЧ и ФВЧ, но при этом должно соблюдаться условие: частота сокращения  ФВЧ< ФНЧ.
ФВЧ< ФНЧ.
Рис. 1.29
Полоса пропускания ПФ графически определяется между двумя точками пересечения ЛАЧХ и горизонтальной линией ниже 3Дб от основной характеристики. Для построения фильтров больше первого порядка (с кривизной наклона больше 20Дб/дек прим. более сложные  -цепи, при этом на 1 ОУ строятся фильтры не более 2-го порядка. Далее используется соединение фильтров.
-цепи, при этом на 1 ОУ строятся фильтры не более 2-го порядка. Далее используется соединение фильтров.
ФНЧ 2-го порядка
Рис. 1.30
ФВЧ 2-го порядка
Рис. 1.31
В общем случае передаточная функция фильтра – отношение полиномов соответствующего порядка. Желаемый вид ЛАЧХ и ЛФЧХ определяется выбором коэффициентов. При этом максимально широко применимы фильтры: Баттероворта; Чебышева; Бесселя.
В 1-м основное требование – наиболее плоская вершина ЛАЧХ, минимальная неравномерность в полосе пропускания.
Для 2-го основное требование – максимальная крутизна наклонного участка.
В 3-м должна обеспечиваться линейная зависимость фазового сдвига от частоты.В литературе приводятся коэффициенты полиномов для аппроксимации передаточных функций. По заданным коэффициентам полинома определяется расчет параметров элементов.
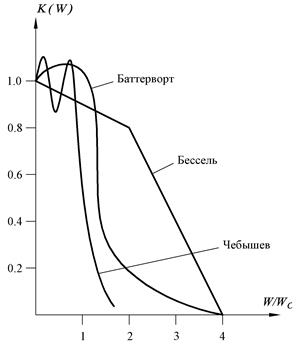
Рис. 1.32
Выражение передаточной функции для ФНЧ 2-го порядка:
Узкополосный заградительный фильтр с двойным  -мостом
-мостом
Рис. 1.33
Рис. 1.34
Данный фильтр для подавления сигналов помехи с известной частотой .
Мультивибраторы
Устройства имеющие два неустойчивых противоположных состояния и формирующих сигналы прямоугольной формы.
Мультивибратор на основе ОУ.
Рис. 4.9 Рис. 4.1
 и
и  образуют частотозависимую цепь ООС. Она обеспечивает заданное время пребывания ОУ в одном из крайних состояний.
образуют частотозависимую цепь ООС. Она обеспечивает заданное время пребывания ОУ в одном из крайних состояний.
Цепь ООС – инерционное звено 1-го порядка с выхода на вход.

 –частотозависимая цепь ПОС. Она обеспечивает лавинообразный процесс переключения ОУ.
–частотозависимая цепь ПОС. Она обеспечивает лавинообразный процесс переключения ОУ.

при |+  | = |–
| = |–  |
|
Симметричный мультивибратор на транзисторах
Рис. 4.11
При = = 

 =
=  =
= 


Мультивибратор имеет два выхода, на которые получаются противофазные импульсы.
Симметричный мультивибратор на логических элементах (ЛЭ)
Рис. 4.12
,  образуют цепь ОС. Для получения равной длительности импульса и паузы должно выполнятся условие:
образуют цепь ОС. Для получения равной длительности импульса и паузы должно выполнятся условие:
=  ;
;  =
=
 – пороговое напряжение ЛЭ.
– пороговое напряжение ЛЭ.
= 1,5 В для ТТЛ.
Несимметричный мультивибратор на ЛЭ.
Схема применяется когда необходимо чтобы 
 2.
2.
Рис. 4.13
Рис. 4.14
 – цепь ООС работающей, как линейный усилитель и стабилизирует частоту выходных импульсов, обеспечивает условие самовозбуждения.
– цепь ООС работающей, как линейный усилитель и стабилизирует частоту выходных импульсов, обеспечивает условие самовозбуждения.
– частотозависимая цепь ОС.
 – согласование по сопротивлению DD1 и DD2 для стабильности работы.
– согласование по сопротивлению DD1 и DD2 для стабильности работы.
Для уменьшения влияния нагрузки на частоту в схеме можно предусмотреть буферный логический элемент.
Импульсные СН (ИСН)
ИСН по сравнению с непрерывными СН имеют более высокий КПД (0,8…0,9), меньшие габариты и массу. Эти плюсы проявляются в максимальной степени при низком уровне входного сигнала, и больших токах нагрузки, когда падение напряжения на РЭ соизмеримо с  .
.
Функциональная схема ИСН содержит цепь ОС, ИОН  (стабилитрон) как у непрерывных, УН, ЭС, РЭ.
(стабилитрон) как у непрерывных, УН, ЭС, РЭ.
Отличие РЭ (тиристор) работает в импульсном (ключевом) режиме, поэтому потери мощности на РЭ значительно меньше,следовательно можно исключить массивные радиатоы.


Рис. 5.9
УН – для увеличения точности стабилизатора
ДН – датчик напряжения цепи ОС
ШИМ – широко–импульсный модулятор. Обеспечивает формирование периодического импульса управления с переменной длительностью функции напряжения  при постоянной частоте следования импульсов.
при постоянной частоте следования импульсов.
Может выполняться на основе компаратора и ГПН. При этом должна обеспечиваться линейная или синусоидальная зависимость  .
.
Выходная часть ИСН содержит ФНЧ с катушкой  ,
,  .Одновременно с этим уменьшаются импульсы напряжения на РЭ, вызываемые противо ЭДС и
.Одновременно с этим уменьшаются импульсы напряжения на РЭ, вызываемые противо ЭДС и  .
.
Рис. 5.10
Ток через VD1 и РЭ в паузах создается за счет энергии, накопленной в катушке и в ФНЧ. Практически рабочие частоты коммутации РЭ имеет свои пределы 10–20 кГц и при их выборе должна решаться задача оптимизации.
Для уменьшения габаритов и массы СН частоту коммутации  надо увеличивать, а для снижения потерь в ключе РЭ и катушки
надо увеличивать, а для снижения потерь в ключе РЭ и катушки  частоту необходимо уменьшать.
частоту необходимо уменьшать.
Применение импульсного СН целесообразно при мощности более 1–5кВт и низких уровнях  (24В).
(24В).
Блоки регулирующие
В группу регулирующих устройств комплекса входят блоки с импульсным и аналоговым выходами (буквы И или А в шифре блока соответственно).
Блоки регулирующие импульсные выпускаются нескольких модификаций: РБИ1, РБИ2, РБИ3.
Блоки РБИ1 предназначены для формирования закона ПИ-регулирования без дистанционной подстройки параметров.
Блоки РБИ2 обеспечивают дискретную в три ступени дистанционную подстройку. Значения параметров на первой ступени устанавливаются переключателями и являются исходными, на второй и третьей ступенях – устанавливаются при подготовке блока к работе.
Блоки РБИ3 обеспечивают дистанционную аналоговую подстройку параметров.
Блоки регулирующие аналоговые РБА предназначены для формирования тех же законов, что и импульсные блоки. Они могут использоваться для связи аналоговой системы регулирования с цифровой управляющей вычислительной машиной. Аналоговые блоки обеспечивают плавный переход управления с автоматического на ручное и обратно, а также ограничение выходного сигнала по верхнему и нижнему уровням.
Блок питания групповой (БПГ)
Предназначен для питания блоков АКЭСР в шкафном исполнении, формирования стабилизированных напряжений постоянного тока. Блок представляет собой преобразователь напряжения трехфазной сети в напряжение постоянного и переменного токов требуемого уровня (±24 В, ±10 В, 24 В).
Рассмотрим системы управления на аппаратуре АКЭСР
Управление исполнительным механизмом осуществляется по сигналам импульсного регулирующего блока РБИ.
Сигнал от датчика, прошедший кондуктивный разделитель, поступает на вход сумматора блока РБИ. Сигнал задания формируется задатчиком РЗД и тоже поступает на вход сумматора блока РБИ, где вместе с сигналом обратной связи ИМ (исполнительного механизма) формирует сигнал рассогласования. Управление объектом от РБИ может осуществляться как автоматически, так и дистанционно. Выбор режима управления осуществляется ключом блока управления БРУ-У. При автоматическом режиме сигнал рассогласования обрабатывается в формирователе закона регулирования и через ключ блока ручного управления БРУ-У, установленный в положение «А» (автоматическое), поступает на усилитель ПБР, который управляет исполнительным механизмом.
В режиме ручного управления сигнал управления формируется кнопками «Б» (больше) и «М» (меньше), встроенными в БРУ-У. Ключ выбора режимов при этом устанавливается в положение «Д» (дистанционно). Сигнал от датчика положения ИМ поступает на индикатор, встроенный в БРУ-У, и на вход сумматора РБИ1 - РБИ3.
Регулирующий блок РБИ работает в комплекте с исполнительными механизмами типа МЭО и МЭО-К и с магнитными пускателями ПБР-2-3 или ПМЕ-223. Индикация положения МЭО через блок БУ-2 осуществляется показывающим прибором блока управления БУ-2.
При построении АСР на базе шкафного варианта аппаратуры питание регуляторов осуществляется от блока питания БПГ. Ручной задатчик регулятора должен питаться от того же блока, в противном случае аварийное отключение питания задатчика может привести к ложному срабатыванию регулятора.
При построении схем управления с аналоговым регулирующим блоком РБА рекомендуется унифицированный токовый сигнал 0 – 5 мА, пропорциональный параметру, подавать на вход блока кондуктивного разделения БКР1; далее с этого блока сигнал 0 – 10 В подается на вход РБА. Для установки задания используется задатчик РЗД, сигнал которого 0 – 10 В также поступает на блок РБА.
Унифицированный токовый сигнал с выхода блока РБА поступает через блок ручного управления БРУ-У в схему исполнительного устройства системы регулирования.
Регулирующие блоки
В группу регулирующих устройств системы АКЭСР-2 входят блоки РП4-У, РП4-П и РП4-Т. Блок (регулирующий прибор) РП4 осуществляет сравнение сигнала задания с сигналом значения параметра, выделяет сигнал рассогласования и формирует совместно с электрическим исполнительным механизмом постоянной скорости закон ПИ-регулирования.
Блок РП4-У предназначен для работы с токовыми датчиками. Блок имеет четыре входа от 0 до 5 или от 0 до 24 мА и два входа от 0 до 10 В. Токовые входы гальванически разделены друг от друга и от выхода.
Блок РП4-Т предназначен для работы с двумя термопреобразователями сопротивления и одним преобразователем термоэлектрическим. Входной сигнал изменяется от 0 до 50 мВ.
Блок РП4-П предназначен для работы с дифференциально-трансформаторными, индуктивными, реостатными и ферромагнитными датчиками.
Регулирующие органы
Регулирующим органом называется звено исполнительного устройства, предназначенное для изменения расхода вещества или энергии в объект регулирования. Различают дозирующие и дроссельные РО. К дозирующим относятся такие устройства, которые изменяют расход вещества за счет изменения производительности агрегатов (дозаторы, питатели, насосы, компрессоры и т. д.).
Дроссельный РО представляет собой переменное гидравлическое сопротивление, изменяющее расход вещества за счет изменения своего проходного сечения; к ним относятся регулирующие клапаны, поворотные заслонки, шиберы и краны. Регулирующие органы характеризуются многими параметрами, основными из которых являются: пропускная и условная пропускная способности, условное и рабочее давление, перепад давления на РО и условный проход.
Пропускной способностью  называется расход жидкости с плотностью 1000 кг/м2, пропускаемой РО при перепаде давления на нем
называется расход жидкости с плотностью 1000 кг/м2, пропускаемой РО при перепаде давления на нем  . Пропускная способность измеряется в кубических метрах в час (м3/час).
. Пропускная способность измеряется в кубических метрах в час (м3/час).
Условной пропускной способностью называется номинальное значение пропускной способности РО при максимальном (условном) ходе затвора, выраженное в кубических метрах в час (м3/час). Условная пропускная способность зависит от типа РО и размера его условного прохода  .
.
Условным давлением  называется наибольшее допустимое давление среды на РО при нормальной температуре. Прочность металлов с повышением температуры понижается. Поэтому для арматуры и соединительных частей предусматривается также максимальное рабочее давление.
называется наибольшее допустимое давление среды на РО при нормальной температуре. Прочность металлов с повышением температуры понижается. Поэтому для арматуры и соединительных частей предусматривается также максимальное рабочее давление.
Максимальное рабочее давление – это наибольшее установленное давление среды на РО при фактической температуре. Рабочее давление при одном и том же условном давлении зависит от свойств металла деталей РО и температуры среды.
Условным проходом  в РО называется номинальный диаметр прохода в присоединительных патрубках. Стандартные размеры условных проходов не распространяются на размеры прохода внутри корпуса.
в РО называется номинальный диаметр прохода в присоединительных патрубках. Стандартные размеры условных проходов не распространяются на размеры прохода внутри корпуса.
Перепад давления на РО определяет усилия, на которые рассчитывают ИМ, а также износ дроссельных поверхностей. Для многих видов исполнительных устройств, в которых затвор не разгружен от статического и динамического воздействия среды, предельно допустимый перепад давления устанавливают в зависимости от мощности ИМ.
Соединены последовательно.
Рис. 7.5. Принципиальная пневматическая схема дифференциального
делителя давления.
С учетом этого запишем
 , откуда
, откуда  ,
,
где α2-3 - проводимость дифференциального делителя давления по каналу 2-3.
Исходя из принципа работы дроссельного сумматора можно записать
 , или
, или
 . (7.18)
. (7.18)
Аналогично,
 , или
, или
 , (7.19)
, (7.19)
где  - проводимость дифференциального делителя давления по каналу 1-4.
- проводимость дифференциального делителя давления по каналу 1-4.
Если за вход дифференциального делителя давления принять разность  , а за выход разность , то с учетом (7.18) и (7.19) получим
, а за выход разность , то с учетом (7.18) и (7.19) получим
 (7.20)
(7.20)
или,  , (7.22),
, (7.22),
где  (7.23)
(7.23)
- коэффициент передачи дифференциального делителя давления по каналу «  ».
».
В пневматических регулирующих устройствах проводимости постоянных дросселей α1 и a2, как правило, примерно равны.
В этом случае коэффициент передачи (7.23) будет равен
 . (7.24)
. (7.24)
При полностью закрытом переменном дросселе b®0,  ; при полностью открытом b®¥, k =0.
; при полностью открытом b®¥, k =0.
Таким образом, при настройке дифференциального делителя давления, регулируя степень открытия переменного дросселя, коэффициент передачи можно плавно изменять от 0 до 1.
Регулятор позиционный ПР1.5
Регулятор состоит из задатчика 1, постоянного пневмосопротивления 2, трехмембранного элемента сравнения 3, усилителя мощности 4, и переключателя каналов 5.
Регулятор реализует функцию двухпозиционного регулирования. Действие основано на сравнении двух давлений: давления  , поступающего на вход от измерительного прибора, и давления задания
, поступающего на вход от измерительного прибора, и давления задания  , устанавливаемого задатчиком, встроенным в прибор. Значение давления контролируется манометром М.
, устанавливаемого задатчиком, встроенным в прибор. Значение давления контролируется манометром М.
Регулятор выдает верхний пневматический сигнал при отклонении регулируемого параметра от заданного значения. Если параметр не выходит за предел заданного значения, то на выходе регулятора устанавливается нижний пневматический сигнал.
Для получения верхнего сигнала при превышении параметром заданного значения регулятор настраивают на максимум. Регулятор, настроенный на минимум, выдает верхний сигнал, когда параметр становится ниже заданного значения. Регулятор настраивается на максимум или минимум путем переключения его входных каналов.
Рассмотрим работу регулятора при настройке на минимум. Переменная поступает в камеру Б3 элемента сравнения 3. Задание, установленное задатчиком 1, подводится к камере В3. Пока переменная остается больше задания, сопло  закрыто и сигнал на выходе элемента сравнения принимает нижнее значение. Как только переменная станет меньше задания, откроется сопло – выходной сигнал примет верхнее значение.
закрыто и сигнал на выходе элемента сравнения принимает нижнее значение. Как только переменная станет меньше задания, откроется сопло – выходной сигнал примет верхнее значение.
При настройке на максимум задание подается в камеру Б3, а переменная – в камеру В3. Если , изменяясь, остается меньше , сопло закрыто, то на выходе будет нижний пневматический сигнал.
При > сопло открывается и на выходе элемента сравнения формируется верхний пневматический сигнал.
Таким образом, при повышении (понижении) поступающего на вход регулятора давления сжатого воздуха, пропорционального значению величины измеряемого или регулируемого параметра, когда он станет выше (ниже) заданного значения, на выходе прибора давление скачкообразно изменяется от нижнего до верхнего значения.
Перенастройка регулятора с максимума на минимум или с минимума на максимум производится установкой диска переключения каналов «min – max». Для этого надо ослабить винт, крепящий диск, повернуть диск так, чтобы риска на плате совпадала с риской, стоящей против соответствующей надписи на диске, и затем снова завернуть винт.
Вращением винта задатчика 1, в который питание подается через сопротивление 2, достигается требуемое значение величины задания. Выходное давление усиливается по мощности с помощью элемента 4. Статические характеристики регулятора представлены на рис. 7.6.
а) б)
Рис. 7.6.Статические характеристики регулятора ПР 1.5
а) при настройке на «максимум», б) при настройке на «мимимум»
Рис. 7.7. Принципиальная схема регулятора ПР 1.5
Рис. 13. Принципиальная схема регулятора ПР1.6
Пока параметр  меньше верхнего граничного значения зоны возврата
меньше верхнего граничного значения зоны возврата  , закрыто сопло
, закрыто сопло  и открыто сопло
и открыто сопло  , сообщающееся с атмосферой. Следовательно,
, сообщающееся с атмосферой. Следовательно,  = 0 и
= 0 и  = 0. Как только параметр превысит верхнее граничное значение зоны возврата, сигнал на выходе элемента сравнения станет равным 1, а давление от задатчика 5 пройдет на выход устройства и = 1. В момент смены сигнала элемента 1 сигнал
= 0. Как только параметр превысит верхнее граничное значение зоны возврата, сигнал на выходе элемента сравнения станет равным 1, а давление от задатчика 5 пройдет на выход устройства и = 1. В момент смены сигнала элемента 1 сигнал  перейдет в камеру В1, при этом со значением сравнивается нижнее граничное значение зоны возврата
перейдет в камеру В1, при этом со значением сравнивается нижнее граничное значение зоны возврата  . Сигнал = 1 сохраняется до тех пор, пока параметр будет больше нижнего граничного значения зоны возврата
. Сигнал = 1 сохраняется до тех пор, пока параметр будет больше нижнего граничного значения зоны возврата  . При
. При  давление = 0, = 0, – в камере Г1.
давление = 0, = 0, – в камере Г1.
Сигнал на выходе остается равным 0 при .
Если регулятор настроен на минимум, давления от измерительного прибора и от внешнего задатчика меняются местами: попадает в камеру Б1, а – в камеру Д1.
Сигнал = 1 соответствует значению , так как при больше этого значения, = 0; – в камере Г1.
Как только опустится за нижнее граничное значение зоны возврата, все сигналы изменят свои значения на обратные: = 1, попадает в камеру В1. Сигнал = 0 появится при  .
.
Статические характеристики регулятора ПР1.6 представлены на рис. 7.9.
а) б)
Рис. 7.9. Статические характеристики регулятора ПР1.6
Введение
В общем случае система автоматического управления независимо от физической природы объекта управления содержит следующие функциональные устройства:
- средства сбора информации о состоянии объекта управления и текущих параметрах технологического процесса; это различные датчики и измерительные преобразователи, которые рассматриваются в курсе «Технические измерения и приборы»;
- устройства для передачи сигналов датчиков, к которым относятся нормирующие преобразователи, магистральные усилители, интерфейсы, а также система мультиплексор - демультиплексор;
- устройства для обработки и преобразования сигналов по их виду, частотному спектру и амплитудному диапазону;
- регуляторы, формирующие необходимый закон управления объектом;
- исполнительные механизмы, отрабатывающие заданный закон управления;
- регулирующие органы, непосредственно воздействующие на объект управления;
- средства отображения информации для визуального отсчета или регистрации текущих параметров объекта и хода технологического процесса;
- вспомогательные устройства, обеспечивающие функционирование средств автоматизации, к которым относятся стабилизаторы напряжения и тока, генератора нормированных сигналов, задающие устройства, инверторы и др.
Большинство из перечисленных устройств являются типовыми и выпускаются промышленностью, например, агрегированные комплексы средств автоматизации (регуляторы, исполнительные механизмы, регулирующие органы).
Ряд же функциональных устройств может выполняться на основе интегральных микросхем с дополнительными элементами, как специальные узлы систем управления. В настоящее время электронная промышленность освоила производство интегральных микросхем с заданными пользователем свойствами, которые могут выполнять совокупность функций типовых устройств. Это расширяет возможность разработчиков при создании надежных и эффективных средств автоматизации.
Изучение дисциплины «Технические средства автоматизации» позволяет грамотно составить техническое задание на изготовление таких интегральных микросхем, а также осуществлять рациональный выбор типовых средств автоматизации, производить их монтаж, наладку и эксплуатацию.
Глава 1. Устройства для обработки и преобразования
аналоговых сигналов
Аналоговые компараторы
Компаратор – это устройство для сравнения 2-х сигналов.
Общий принцип действия: если в процессе изменения входных сигналов один превышает другой, то компаратор меняет свое состояние на противоположное. Чаще один из входных сигналов имеет заданное фиксированное значение. Это опорный сигнал , который определяет уровень срабатывания компаратора. Другой входной сигнал может меняться. Выходной сигнал имеет два уровня: логический 0 или логическая 1, совместимые с сериями типовыми цифровых ИС. В процессе работы компаратор может перестраиваться на различные уровни срабатывания за счет изменения опорного сигнала вручную или автоматически.
Применение: позиционные регуляторы, сигнализаторы, устройства сортировки на 2-3 группы (норма, меньше, больше), преобразователи напряжение – частота, системы импульсно-фазового управления, аналого-цифровые преобразователи (АЦП).
Существует три разновидности компараторов: однопороговый, регенеративный и двухпороговый. Компаратор может выполнятся на основе операционного усилителя (ОУ) с внешними цепями, а также в виде специальных интегральных схем (ИС), имеющих повышенное быстродействие, например, типа: К521СА3, К597СА1, К544СА2
Однопороговый компаратор
Схема компаратора на основе ОУ приведена на рисунке 1.1
Рис. 1.1. Однопороговый компаратор
Назначение элементов.
Резисторы , служат для выравнивания входных токов ОУ при отсутствии или равенстве входных сигналов и уменьшения погрешности срабатывания за счет уменьшения напряжения смещения нуля . Обычно = .
При использовании ОУ на полевых транзисторах и отсутствуют. Резистор обеспечивает номинальный ток стабилизации стабилитрона VD1.
Резистор служит для согласования по сопротивлению компаратора с последующими элементами ТТЛ, ≤ 400 Ом (определяется отношением ). С одной стороны нужно уменьшать, но при этом загружается ОУ.
Потенциометр является «задатчиком», преобразуя напряжение питания в задаваемое опорного напряжение .
Стабилитрон VD1 задает уровень логической «1» на выходе компаратора.
Диод VD2 исключает «отрицательное» напряжение на выходе компаратора.
ОУ DA1 обеспечивает сравнение сигналов и и повышает точность компаратора.
На рис. 1.2. представлена статическая характеристика компаратора - зависимость напряжения на выходе от напряжения на входе устройства.
Рис. 1.2. Статическая характеристика компаратора
Принцип действия компаратора:
1) Если входное напряжение находится в пределах , то напряжение ОУ максимально и положительно за счет положительного опорного напряжения + и большого коэффициента усиления Ku. Диод VD2 открыт и выходное напряжение компаратора соответствует логической единице ;
2) При достижении происходит переключение ОУ за счет смены знака разности напряжений на входе ОУ и инвертирования этой разности . Диод VD2 закрывается и выходное напряжение компаратора становится близким к нулю ≈ 0.
Точность компаратора характеризируется порогом чувствительности (где – фактическое напряжение на входе при переключении) и определяется алгебраической суммой четырех составляющих.
,
где - напряжение смещения нуля ОУ;
- температурный дрейф напряжения ;
- временной дрейф напряжения .
Практический порог чувствительности компаратора на типовом ОУ составляет = 1-5 мВ. Компенсация составляющих осуществляется: – настройкой ОУ с помощью дополнительного потенциометра; - применением терморезисторов; выбором большого Ku.
Временной дрейф напряжения - компенсировать нельзя, так как он имеет случайный характер.
Быстродействие компаратора определяется временем восстановления - это часть времени переходного процесса, при котором выходной сигнал достигает величины порога срабатывания ТТЛ ( ≈ 1,5В). При этом между входами подается нормированный перепад напряжений = 5 мВ (рис. 1.3.). Время восстановления зависит от полосы пропускания частот ОУ и емкости нагрузки C н.
Рис. 1.3. Определение времени восстановления
Практически = 5 50 мкс (для компараторов на ОУ). В специализированных компараторах на ИС ≤ 10 нс.
Преимущества компаратора на ОУ: малое потребление тока и дополнительные функциональные возможности, высокая точность переключения. Недостатки – меньшее быстродействие.
Регенеративный компаратор (РК)
Отличительная особенность регенеративного компаратора (рис. 1.4.) – введение цепи положительной обратной связи (ПОС) посредством резистора и диода VD3.
Рис. 1.4. Регенеративный компаратор
Принцип действия РК
Исходное состояние:
= 0
При увеличении напряжения переключение регенеративного компаратора произойдет тогда, когда входное напряжение превысит не только напряжение , но и сигнал ПОС. При этом часть выходного сигнала подается на н-вход ОУ и складывается с опорным напряжением U оп.
Это напряжение соответствует верхнему порогу переключения
.
За счет действия ПОС процесс переключения регенеративного компаратора происходит лавинообразно. После переключения, когда выходной сигнал компаратора близок к нулю .
При этом сигнал ПОС исчезает. В связи с этим обратное переключение компаратора при уменьшении напряжения произойдет без учета действия ПОС, как у однопорогового при = .
= – нижний порог переключения.
Обратное переключение происходит также лавинообразно и регенеративный компаратор переходит в исходное состояние, то есть при ≤ .
Таким образом, статическая характеристика регенеративного компаратора имеет гистерезис (рис. 1.5.) или зону переключения, которая определяется выражением:
.
Зона переключения регенеративного компаратора при перестройке на различные уровни срабатывания не остается постоянной, а уменьшается с увеличением . Это является недостатком схемы регенеративного компаратора и требует дополнительных настроек при необходимости сохранения зоны переключения путем изменения сопротивления .
Особенности применения регенеративного компаратора.
Быстродействие регенеративного компаратора выше чем у однопорогового компаратора, причем время переключения не зависит от скорости изменения входного сигнала. Поэтому регенеративный компаратор целесообразно применять на низких частотах или очень малых скоростях изменения входного напряжения .
Гистерезис статической характеристики регенеративного компаратора позволяет исключить влияние помехи. Для этого зона переключения выбирается больше двойной амплитуды помехи ( > 2 ).
Рис. 1.5 Статическая характеристика регенеративного компаратора
Двухпороговый компаратор (ДК).
Состояние двухпорогового компаратора изменяется два раза при увеличении входного напряжения . Его можно построить на основе двух однопороговых компараторов с разной настройкой при объединении их сигнальных входов.
Существует схема двухпорогового компаратора на основе одного ОУ (рис. 1.6.).
Рис. 1.6
Рис. 1.7
Назначение элементов.
Резисторы , обеспечивает вычитание напряжений и . С этой целью знаки и берутся разными.
обеспечивает выравнивание входных токов ОУ, для уменьшения напряжения U см и повышения точности ДК. Сопротивление выбирается из условия:
, при = ; = 0,5 .
, ограничивает ток в цепи ОС.
Диоды VD1 – VD4 образуют нелинейную цепь ООС с дополнительными источниками напряжения смещения и , которые определяют пороги переключения компаратора.
Нижний порог
Верхний порог
– прямое падение напряжения на диоде.
= 0,6 – 0,7 В (Si).
Зона переключения двухпорогового компаратора.
; при = , = .
Эта зона не зависит от опорного напряжения .
Настройка зоны переключения практически осуществляется изменением сопротивлений и в цепи смещения.
Принцип действия ДК.
При
VD4, VD1 – открыты
VD2, VD3 – закрыты. Цепь ООС оборвана. Действует максимальный коэффициент усиления ОУ.
Кu = К0
=
При
VD4, VD1 – закрыты
VD2, VD3 – открыты. Цепь ООС также оборвана
= –
При
Все диоды открыты. Создается глубокая ООС и коэффициент усиления близок к нулю:
Применение двухпорогового компаратора.
ДК может использоваться как 3-х позиционный регулятор и сигнализатор технологических параметров, а также для сортировки деталей по 3-м размерным группам: «меньше – норма – больше».
Модуляторы – демодуляторы
Модуляторы – демодуляторы применяются в измерительных и преобразовательных устройствах для обработки аналоговых слаботочных сигналов. При этом демодулятор (ДМ) служит для фазочувствительного выпрямления сигналов переменного тока и используется в измерительных устройствах с индуктивными, фотоэлектрическими, тензорезисторными датчиками (преобразователями). Особенность ДМ – изменение знака выходного напряжения при изменении фазы входного сигнала. Это необходимо для регистрации направления перемещения рабочих органов. В обычных мостовых выпрямителях знак напряжения постоянный и не зависит от фазы входного сигнала.
В настоящее время модулятор и демодулятор строятся на основании ОУ. Это позволяет увеличить точность преобразования, повысить , уменьшить , получить усиление сигнала в широком линейном диапазоне . Ранее применялись для этих целей мостовые диодные схемы, которые назывались кольцевой демодулятор.
Основная схема демодулятора приведена на рис. 1.8.
Рис. 1.8
Схема содержит:
ОУ DA1, который обязательно выполняется на полевых транзисторах.
, образуют цепь ООС, причем = .
ограничивает ток, коммутируемый ключом и повышает .
Ключ периодически замыкается на частоте входного сигнала синхронно с ним в течение одного полупериода. – биполярный или полевой транзисторы в ключевом режиме (рис. 1.9).
Рис. 1.9
Когда ключ замыкается, ОУ работает как инвертор, повторяет величину U входа, но меняет его знак. В этом случае
Сигнал через положительный вход не проходит.
Когда ключ разомкнут (второй полупериод), схема работает как повторитель.
В результате на выходе из переменного напряжения получаем однополярное пульсирующее напряжение .
Фаза α = 0 Фаза α = π
Рис. 1.10
Работа ключа не зависит от фазы , поэтому на выходе получаем изменение знака при смене фазы .
Полевой транзистор на входе ОУ необходим, чтобы не изменялся ток на положительном входе при замыкании или размыкании ключа, что будет наблюдаться при использовании биполярного транзистора на входе. Изменение вызывает появление ложного выходного сигнала.
Недостатки схемы:
1. Отсутствие усиления входного сигнала ( = )
2. Неодинаковое в соседних полупериодах входного сигнала из-за замкнутого и разомкнутого состояний .. Существует схема демодулятора с двумя ключами, обеспечивающая постоянное значение для соседних полупериодов.
Для получения КU > 1 необходимо выполнить два условия:
1. >
2. Выровнять КU для соседних полупериодов. Для этого используют дополнительный резистор (рис. 1.11).
Рис. 1.11
Пусть =
Для случая = 1 получаем = ∞ , то есть резистор отсутствовует, что соответствует предыдущей схеме (рис. 1.10).
Модулятор. Рассматриваемые схемы используются в качестве модулятора входного сигнала, который обеспечивает преобразование постоянного входного напряжения в переменное, фаза которого зависит от знака , а амплитуда определяется уровнем . Для этого на вход управления ключом подается переменное (прямоугольное) с частотой модуляции, а на информационный вход – сигнал неизменный или медленно меняющийся любого знака.
Рис. 1.12
По аналогии с ДМ в соседних полупериодах работы ключа SI меняется знак выходного напряжения, в результате чего получается на выходе модулятора переменное напряжение прямоугольной формы, у которого амплитуда и фаза соответствует уровню входного напряжения .
Совместно модулятор и демодулятор используют в специальном ОУ типа МДМ, в котором усиление осуществляется на переменном токе с использованием разделительных конденсаторов. В связи с этим этот ОУ имеет малое напряжение смещения нуля и малый дрейф при высоком коэффициенте усиления ( = 106).
Амплитудные детекторы
Амплитудный детектор (АД) предназначен для запоминания экстремальных значений входного сигнала. Другое название этого устройства:
Пик-детектор. Назначение элементов схемы (рис. 1.13): DA1 обеспечивает необходимую линейность статической характеристики за счет компенсации нелинейности диодов VD1 с глубокой ООС.
Диод VD1 исключает разряд заполняющего через ОУ DA1.
Диод VD2 используют при входном сигнале переменного тока, а также для исключения насыщения ОУ DA1.
Конденсатор обеспечивает хранение экстремального значения входного сигнала.
Рис. 1.13
Ключ для сброса заряда на конденсаторе в конце цикла хранения.
DA2 – буферный ОУ, являющийся повторителем напряжения с большим входным сопротивлением , согласует амплитудный детектор с нагрузкой, исключает разряд через нагрузку.
Сопротивление образует цепь ООС, а также ограничивает входной ток ОУ DA1 при переходных процессах.
При увеличении амплитудный детектор отслеживает текущее значение и обеспечивает непрерывный заряд (рис 1.14). При дальнейшем уменьшении амплитудный детектор автоматически переходит в режим хранения сигнала . При этом VD1 закрывается, так как оказывается включенным в обратном направлении. За счет действия глубокой ООС компенсируются все сдвиги напряжений внутри контура, обеспечивается высокая линейность преобразователя (при нелинейности ВАХ VD1), и высокое быстродействие амплитудного детектора.
Рис. 1.14
Погрешность амплитудного детектора в режиме хранения определяется степенью разряда конденсатора . Этот разряд может быть через следующие цепи:
VD1 – через ,
- DA2; - ; -
Max -
При этом время полного разряда
При необходимости восстановления начальных условий подается сигнал сброса на ключ (в конце цикла хранения).
Детекторы среднего значения
Детекторы среднего значения (ДСЗ) -это прецизионные выпрямители, постоянная составляющая выходного сигнала которых равна или пропорциональна среднему значению входного сигнала за каждый период. В отличие от обычного диодного выпрямителя ДСЗ может работать при малых входных сигналах (от нескольких мВ).
ДСЗ применяются в точных измерительных приборах (вольтметрах), преобразователях, детекторах модуля сигнала.
В ДСЗ диод VD1 (рис.1.15) вместе с ОУ охватывается глубокой ООС, что уменьшает влияние порогового напряжения VD1 и увеличивает линейность преобразователя.
Схема прецизионного диода
Рис.1.15 Рис. 1.16
Когда > 0, VD1 открыт, цепь ООС замкнута, ; . Порог открывания схемы ≤ 0,1 мВ. При < 0 VD1 закрыт, 0.
Статическая характеристика линейна при > 0 (рис. 1.16).
.
Схема однополупериодного прецизионного выпрямителя с инвертирование и усилением входного сигнала представлена на рис. 1.17.
Недостатки предыдущей схемы: отсутствие усиления ; ограниченное быстродействие из-за большого времени рассасывания транзистора ОУ из-за токовых перегрузок.
Назначение элементов: - – цепь ООС; – для выравнивания входных токов ОУ, уменьшения , увеличения точности.
VD1 исключает отрицательное напряжение на выходе.
VD2 стабилитрон, ограничивающий уровень ОУ, исключает насыщение выходных транзисторов и увеличивает быстродействие схемы.
Рис. 1.17
При большой глубине ОС выходное напряжение не зависит от и порогового напряжения VD1, а определяется выражением
при > 0 (рис.1.18)
Рис. 1.18
При построении двухполупериодных выпрямителей существует много вариантов схем. Для организации общего провода применяются 2–х каскадные схемы детекторов, которые усложняют устройства. Самая простая схема двухполупериодного прецизионного выпрямителя с «незаземленной» нагрузкой содержит мостовой выпрямитель в цепи ООС (рис.1.19).
Рис. 1.19
Ток нагрузки имеет одно направление и не зависит от нагрузки . Схема является стабилизатором тока, так как в ней действует параллельно – последовательная ОС. Величина этого тока определяется уровнем входного сигнала . Схема применяется для аналоговых вольтметров переменного напряжения с линейной шкалой.
Устройство выборки-хранения
Устройства выборки-хранения (УВХ) относятся к элементам аналоговой памяти и обеспечивают хранение в течение заданного времени мгновенного значения входного сигнала, выбранного в заданный момент времени. УВХ имеет два режима работы: выборка и хранение. В режиме выборки на вход управления подается импульсный сигнал и осуществляется слежение за мгновенным значением в течение времени . По окончании импульса управления УВХ переходит в режим хранения. УВХ применяется в измерительной и преобразовательной технике, например, для быстродействующих фильтров инфранизких частот, преобразователей импульсного напряжения в постоянное. В настоящее время УВХ выпускаются в виде ИС типа Кр 1100СК2, которые построены по двухкаскадной схеме (рис.1.20).
Назначение элементов схемы.
DA1 – ОУ, обеспечивающий согласование УВХ с источником входного сигнала и быстрый заряд .
Ключ на МОП – транзисторе, замыкающийся во время выборки по сигналу .
– запоминающий конденсатор.
Буферный каскад на DA 2 повышает нагрузочную способность УВХ.
образует цепь ООС и ограничивает входной ток DA1 в переходных режимах.
Во время импульсов ключ замкнут и заряжается от мгновенного значения . Затем размыкается и на сохраняется напряжение до следующего импульса выборки. Для ускорения заряда в процессе выборки емкость необходимо уменьшать.
Для уменьшения погрешности в режиме хранения емкость необходимо увеличить.
Таким образом, условия достижения точности и быстродействия при выборе противоречивы.
Рис. 1.20
На рис. 1.21 показаны диаграммы сигналов для примера применения УВХ, регистрирующего характер изменения амплитуды входного сигнала.
Рис. 1.21
В этом случае УВХ может использоваться, как сглаживающий фильтр, имеющий высокое быстродействие (tперех = T) и малый коэффициент пульсации. Параметры типового УВХ Кр 1100СК2: время выборки = 10 мкс (при =1000 пФ), скорость спада напряжения в режиме хранения 5 мв/мс (при = 1000 пФ). Выбор при периодическом сигнале определяется из условия .
Активные фильтры
Активные фильтры применяется в преобразовательных устройствах, когда требуется выделить полезный сигнал или подавить сигнал помехи в заданном частотном спектре. Кроме того, активные фильтры могут использоваться при синтезе корректирующих звеньев в САУ. Сейчас активные фильтры строятся на основании ОУ и – элементов. По сравнению с пассивными фильтрами применение ОУ обеспечивает усиление полезного фильтруемого сигнала, но необходимо согласование, фильтра с источником сигнала и нагрузкой, что увеличивает точность и стабильность параметров фильтров. Максимально эффективно использование активных фильтров на низких частотах 1-1000 Гц. При этом можно исключить высокогабаритные катушки индуктивности с обеспечением необходимой крутизны АЧХ фильтра. Среди активных фильтров максимальное применение находят: ФНЧ – фильтр низких частот; ФВЧ, полосовые и заградительные фильтры.
ФНЧ 1-го порядка
Рис. 1.24
; ;
ЛАЧХ
Рис. 1.25
Для сравнения: пассивный ФНЧ 1-го порядка
Рис. 1.26
При практической реализации будет иметь ЛАЧХ отличную от теоретической из-за влияния сопротивления источника сигнала и сопротивления нагрузки.
ФВЧ 1-го порядка
Рис. 1.27
Рис. 1.28
При конкретных указанных значениях , в котором меняется коэффициент передачи БСП.
Полосовой фильтр можно получить последовательным соединением ФНЧ и ФВЧ, но при этом должно соблюдаться условие: частота сокращения ФВЧ< ФНЧ.
Рис. 1.29
Полоса пропускания ПФ графически определяется между двумя точками пересечения ЛАЧХ и горизонтальной линией ниже 3Дб от основной характеристики. Для построения фильтров больше первого порядка (с кривизной наклона больше 20Дб/дек прим. более сложные -цепи, при этом на 1 ОУ строятся фильтры не более 2-го порядка. Далее используется соединение фильтров.
ФНЧ 2-го порядка
Рис. 1.30
ФВЧ 2-го порядка
Рис. 1.31
В общем случае передаточная функция фильтра – отношение полиномов соответствующего порядка. Желаемый вид ЛАЧХ и ЛФЧХ определяется выбором коэффициентов. При этом максимально широко применимы фильтры: Баттероворта; Чебышева; Бесселя.
В 1-м основное требование – наиболее плоская вершина ЛАЧХ, минимальная неравномерность в полосе пропускания.
Для 2-го основное требование – максимальная крутизна наклонного участка.
В 3-м должна обеспечиваться линейная зависимость фазового сдвига от частоты.В литературе приводятся коэффициенты полиномов для аппроксимации передаточных функций. По заданным коэффициентам полинома определяется расчет параметров элементов.
Рис. 1.32
Выражение передаточной функции для ФНЧ 2-го порядка:
Узкополосный заградительный фильтр с двойным -мостом
Рис. 1.33
Рис. 1.34
Данный фильтр для подавления сигналов помехи с известной частотой .
Глава 2. Полупроводниковые регуляторы напряжения
Дата: 2019-04-23, просмотров: 794.