Они применяются для введения информации от термопар или
терморезисторов в ЭВМ или в систему автоматического регулирова-
ния и предназначены для преобразования значения термоЭДС или
сопротивления терморезистора в унифицированный сигнал посто-
янного тока 0... 5 мА.
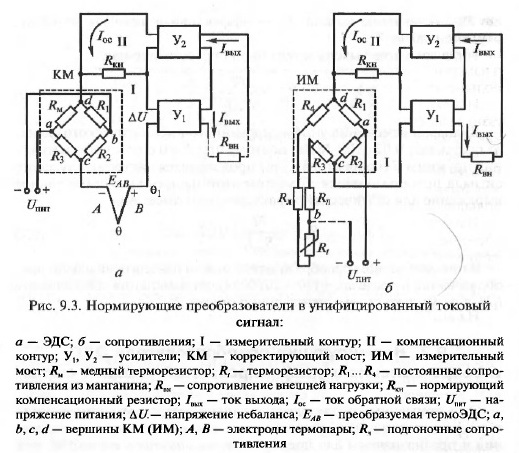
В основу работы нормирующего преобразователя термоЭДС
(рис. 9.3, а) положен компенсационный метод измерения термоЭДС
с использованием схемы потенциометра с переменной силой рабо-
чего тока. Схема состоит из двух контуров: измерительного контура I
и компенсационного контура II. Контур I содержит корректирующий
мост КМ, усилитель У, с токовым выходом Iвых и резистор Rкн.
К контуру I подсоединена термопара АВ. Корректирующий мост
предназначен для введения автоматической поправки на изменение
температуры свободного конца термопары, а также компенсации
начальной термоЭДС в преобразователях, нижний предел измерения
которых не равен 0 °С. К диагонали ab питания моста подведено
стабилизированное напряжение постоянного тока. Резисторы R x , R 2
и R } — манганиновые, резистор R M — медный. Усилитель У, выпол-
няет функции нуль-индикатора. Контур компенсации II включает в
себя резистор R KH и усилитель обратной связи У2. Этот усилитель
аналогичен усилителю У„ но включен с глубокой отрицательной
связью по выходному току усилителя. Выходной ток Iос усилителя У2
является рабочим током контура II; при прохождении этого тока по
сопротивлению R KH на нем со стороны контура II создается компен-
сирующее напряжение UKH = I0CRrH.
ТермоЭДС, развиваемая термопарой, равна Е лв ф(Ɵ, Ɵ1) где Ɵ и Ɵ1 — тем-
пературы горячего и холодного концов термопары. Напряжение, снимаемое
с измерительной диагонали КМ, равно термоЭДС, развиваемой термопарой
при температуре окружающей среды 0,: U cd = Е лв (Ɵ, Ɵ0), где 0О — темпера-
тура холодного конца, равная О °С. Таким образом, на один вход усили-
теля У, поступает суммарный сигнал ДU = Е дв (Ɵ, Ɵ0), состоящий из
значения термоЭДС, приведенному к О °С
Е лв (Ɵ, Ɵ0) = Е АВ (Ɵ, Ɵ0) + U cd = EAfl(Ɵ, Ɵ0) + U cd = E ab (Ɵ1, Ɵ0),
и падения напряжения на нормирующем компенсационном резисто-
ре RKH:
U кн = Ioc R кн
За счет усиленного сигнала небаланса, равного ∆U= E Ae(Ɵ, Ɵ0) - U KH ,
на выходе усилителя У, создается ток /вых, который поступает во
внешнюю цепь R m и далее в усилитель обратной связи У2. Выходной
ток Iос этого усилителя, создающий падение напряжения UKH на ре-
зисторе R KH , будет изменяться до тех пор, пока небаланс AU не до-
стигнет некоторой малой величины δU, называемой статической
ошибкой компенсации. Наличие этой ошибки приводит к тому, что
в измерительном контуре I проходит нескомпенсированный ток (чем
больше измеряемая термоЭДС, тем больше этот ток).
Исключить эту ошибку в устройствах, выполненных по статиче-
ской автокомпенсационной схеме, принципиально невозможно, так
как выходной ток преобразователя Iвых и ток контура компенсации
Iос определяются наличием этой ошибки и пропорциональны ей.
В то же время статическая ошибка автокомпенсационной схемы мо-
жет быть значительно уменьшена, если использовать усилитель с
большим коэффициентом усиления.
Измеряемая термоЭДС E AB(Ɵ, Ɵ0)связана с выходным током пре-
образователя Iвых следующим образом. Как уже отмечалось, напря-
жение небаланса на входе У1:
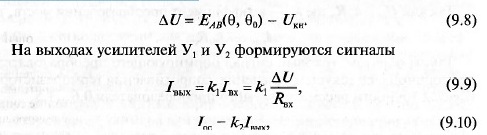
где k1 и k2 — коэффициенты усиления усилителей У, и У2; Iвк = ∆U/R m —
ток, создаваемый во входной цепи усилителя У, сигналом ∆U;R m —
сопротивление входной цепи усилителя У,.
Падение напряжения на резисторе R K н с учетом (9.10) составит
Таким образом, выходной токовый сигнал нормирующего преоб-
разователя пропорционален скорректированному по температуре
холодного конца сигналу термопары.
В зависимости от диапазона входного сигнала нормирующие пре-
образователи, работающие в комплекте с термопарой, имеют классы
точности 0,6... 1,5.
Нормирующий преобразователь сопротивления в унифицирован-
ный токовый сигнал, работающий в комплекте с термопреобразова-
телем сопротивления, по схеме и принципу действия аналогичен
нормирующему преобразователю ЭДС, рассмотренному выше. От-
личие указанных схем заключается в том, что в преобразователе со-
противления (рис. 9.3, б) вместо корректирующего моста использу-
ется измерительный неравновесный мост ИМ, в одно из плеч кото-
рого по трехпроводной схеме включен термопреобразователь
сопротивления R,. Остальные сопротивления выполнены из манга-
нина. Сопротивления R„ служат для подгонки сопротивления соеди-
нительных проводов до номинального значения. К диагонали питания
моста ab подведено стабилизированное напряжение постоянного
тока. Выходной ток преобразователя /вых пропорционален Напряже-
нию U cd в измерительной диагонали моста, и соотношений между
ними может быть представлено в виде

Таким образом, токовый сигнал нормирующего преобразователя
пропорционален текущему значению сопротивления терморезистора.
Классы точности рассматриваемого преобразователя 0,6... 1,5.
Интеллектуальные датчики
В последние годы появился новый класс датчиков — так называе-
мые интеллектуальные датчики. Их наиболее характерная особен-
ность — возможность не только передавать информацию об объекте
на вышестоящий уровень, но и воспринимать сигналы, поступающие
с этого уровня; можно сказать, что в отличие от обычных датчиков
интеллектуальные датчики являются устройствами с обратной связью.
Они способны самостоятельно подстраиваться под условия эксплуа-
тации и постоянно регулировать свою чувствительность. Обработка
измерений непосредственно в самом датчике увеличивает объемы
обрабатываемой информации и скорость ее обработки. Самая ценная
возможность, предоставляемая интеллектуальным датчиком, — воз-
можность получения линейного сигнала от нелинейного чувствитель-
ного элемента при помощи таблицы соответствия, хранящейся в
памяти. Этот фактор позволяет создавать интеллектуальные датчики
с очень низкой нелинейностью.
К интеллектуальным датчикам относят датчики, имеющие в сво-
ем составе АЦП, специализированный микропроцессор, сетевой
контроллер для организации односторонней или двусторонней связи
с ПЭВМ по интерфейсам RS-232, /W-485, а также посредством про-
токолов более высокого уровня: Profibus, Fieldbus Foundation. Такие
устройства осуществляют внутреннюю коррекцию получаемого ана-
логового сигнала; в них могут использоваться протоколы связи типа
HART, Modbus и др. Настройка параметров и режимов работы, диа-
гностика и калибровка интеллектуальных датчиков осуществляется
либо локально (вручную с помощью коммуникаторов различных
типов), либо непосредственно с пульта управления. Это дает возмож-
ность исключить промежуточные звенья в цепи распределенных
систем — программно-логические контроллеры, упростить техниче-
ское обслуживание за счет дистанционной диагностики и конфигу-
рирования. Именно датчики этой группы в полной мере являются
интеллектуальными.
Интеллект датчиков обеспечивает выполнение некоторого набора
из следующих функций: 1) первичная обработка информации в самом
датчике; 2) тарировка характеристик для повышения точности из-
мерения; 3) перепрограммирование характеристики преобразования
(изменение привязки нуля характеристики и перестройка диапазона
измерения); 4) накопление данных за определенное время с их при-
вязкой к сетке времени для пакетной передачи информации в циф-
ровой форме; 5) самотестирование; 6) формирование выходных
данных в унифицированной аналоговой и/или цифровой форме;
7) реализация режима периодической подачи и отключения питания
и других способов минимизации энергопотребления; 8) использова-
ние сторожевого таймера для предотвращения потери программного
управления; 9) передача данных в цифровой форме по унифициро-
ванному радиоканалу.
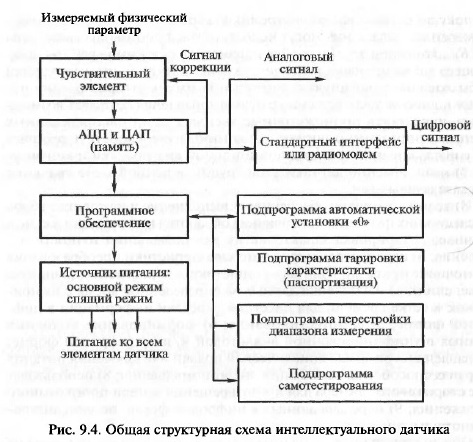
Общая структурная схема интеллектуального датчика показана на
рис. 9.4. Измеряемый физический параметр воспринимается чувстви-
тельным элементом, на выходе которого возникает электрический
сигнал, соответствующий значению параметра. В памяти датчика
содержится эталонная (паспортная) характеристика преобразования.
При помощи одной из подпрограмм она сравнивается с текущей
характеристикой датчика, и по результатам этого сравнения в резуль-
тат измерения вносится коррекция (поправка). В зависимости от того,
в состав какой системы автоматизации входит датчик, используется
либо аналоговый выходной сигнал, либо цифровой. Передача циф-
ровых данных осуществляется либо по той же паре проводников, при
помощи которой подается напряжение питания и которая использу-
ется для передачи выходного аналогового сигнала, либо через общую
для ряда датчиков цифровую проводную сеть. В случае значительно-
го удаления датчиков от основных средств системы автоматизации
датчик с помощью отдельных специальных средств телемеханики
может общаться с контроллером по радиоканалу.
Таким образом, по сравнению с обычными, традиционными дат-
чиками современные интеллектуальные датчики обеспечивают:
1) резкое уменьшение искажений измерительной информации на
пути от датчика к контроллеру, так как вместо низковольтного ана-
лотового сигнала по кабелю, соединяющему датчики с контроллером,
идут цифровые сигналы, на которые электрические и магнитные
промышленные помехи оказывают несравнимо меньшее влияние;
2) увеличение надежности измерения благодаря самодиагностике
датчиков, так как каждый датчик сам оперативно сообщает операто-
ру факт и тип возникающего нарушения, тем самым исключая ис-
пользование для управления некачественных и/или недостоверных
измерений;
3) возможность использования принципов измерения, требующих
достаточно сложной вычислительной обработки выходных сигналов
сенсора, но имеющих ряд преимуществ перед традиционно исполь-
зуемыми принципами измерения по точности, стабильности показа-
ний, простоте установки и обслуживания датчика в процессе его
эксплуатации;
4) возможность построения мультисенсорных датчиков, в которых
преобразователь получает и перерабатывает сигналы ряда однотипных
или разнотипных чувствительных элементов;
5) возможность проведения всей необходимой первичной пере-
работки измерительной информации в датчике и выдачи им искомо-
го текущего значения измеряемой величины в заданных единицах
измерения;
6) возможность передачи в систему автоматизации не только те-
кущего значения измеряемой величины, но и добавочных сигналов
о выходе его за пределы заданных норм, а также возможность пере-
дачи по сети не каждого текущего измеряемого значения, а только
изменившегося по сравнению с предыдущим значения или вышед-
шего за пределы заданных норм значения, или значения, требующе-
го управляющего воздействия;
7) наличие в датчике базы данных для хранения значений изме-
ряемой величины за заданный длительный интервал времени;
8) возможность дистанционно с пульта оператора в оперативном
режиме выбирать диапазон измерения датчика, устанавливать ноль
прибора;
9) возможность путем программирования работы датчика на до-
статочно простом технологическом языке реализовывать в нем про-
стые алгоритмы регулирования, программного управления, блоки-
ровок механизмов;
10) возможность строить достаточно простые цепи регулирования,
программного управления, блокировок на самом нижнем уровне
управления из трех компонентов: интеллектуальных датчиков, по-
левой сети и интеллектуальных исполнительных механизмов, не за-
гружая этими вычислительными операциями контроллеры, что по-
зволяет использовать мощность контроллеров для реализации в них
достаточно сложных и совершенных алгоритмов управления.
Дата: 2019-04-23, просмотров: 357.