ГСП
Для преобразования измерительной информации в унифициро-
ванный сигнал в ГСП применяются преобразователи, работающие по
принципу силовой компенсации.
Электросиловой преобразователь ГСП (рис. 9.1) преобразует уси-
лие, развиваемое измерительным устройством ИУ, в электрический
сигнал (ток). В основу преобразования «сила—ток» положен принцип
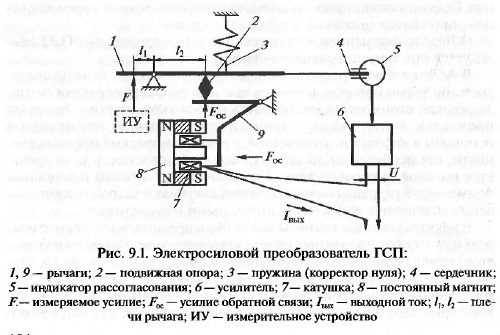
силовой компенсации. Измеряемое усилие F преобразуется в пере-
мещение подвижного сердечника 4 индикатора рассогласования 5,
представляющего собой дифференциально-трансформаторный пре-
образователь, на первичную обмотку которого подается питание, а две
вторичные обмотки подключены к входу усилителя 6. Это усилие F
через подвижную опору 2 уравновешивается усилием обратной связи
F oc , развиваемым магнитоэлектрическим преобразователем, состоя-
щим из стержневого постоянного магнита 8 с П-образным магнито-
проводом, в зазоре которого расположена катушка 7, жестко закреп-
ленная на рычаге 9. Обмотка рамки соединена с выходом электрон-
ного усилителя 6. При изменении значения F равновесие рычажной
системы нарушается, что приводит к перемещению рычага 1 и укреп-
ленного на нем сердечника 4 из магнитомягкого материала. Переме-
щение сердечника 4 преобразуется индикатором перемещения 5 в
электрический сигнал, поступающий на вход электронного усилите-
ля 6, который его усиливает и преобразует в ток /ВЬ1Х, подаваемый в
линию связи и на вход магнитоэлектрического элемента обратной
связи. При протекании тока /вых по катушке 7 элемента обратной свя-
зи формируется усилие обратной связи F oc

где В — магнитная индукция; I — средняя длина витка катушки;
n — число витков катушки. Перемещение рычага 1 под действием
усилий F и F oc происходит до тех пор, пока не наступит состояние
равновесия:

где l1 и 1 г — плечи рычагов соответственно от точки действия силы F
до неподвижной опоры и от точки действия силы F oc (подвижная
опора 2) до неподвижной опоры.
В состоянии равновесия выходной сигнал преобразователя
«сила—ток» связан с измеряемым усилием F зависимостью

Таким образом, постоянный ток /вых пропорционален усилию F,
а следовательно, и значению измеряемой физической величины. На-
стройка преобразователя на заданный предел измерения осуществля-
ется перемещением подвижной опоры 2. Начальное значение вы-
ходного сигнала преобразователя устанавливается натяжением пру-
жины 3 (корректора нуля).
Пневмосиловой преобразователь ГСП (рис. 9.2) преобразует уси-
лие, развиваемое измерительным устройством ИУ, в пневматический
сигнал. Измеряемая физическая величина (давление, температура,
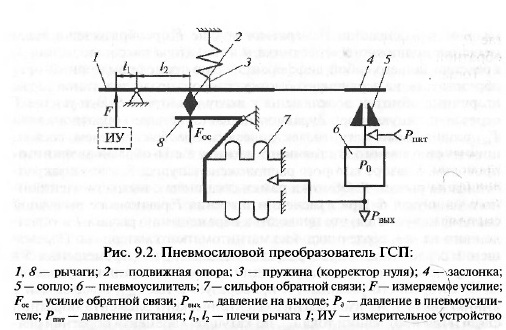
расход и др.) преобразуется в измерительном устройстве ИУ в про-
порциональное усилие F, которое воздействует на рычаг 1 и связан-
ную с ним заслонку 4. Если заслонка прикрывает неподвижное
сопло 5, что соответствует увеличению силы F, то давление Р 0 в
пневмоусилителе 6 увеличивается (при полностью закрытой заслон-
ке давление Р 0 равно давлению питания Рпит). Воздух под этим дав-
лением поступает в сильфон обратной связи 7 и является выходным
сигналом Р вык преобразователя. Усилие обратной связи F oc через ры-
чаг 8 передается рычагу 1 и уравновешивает усилие F, воспринимае-
мое рычагом 1 от измерительного устройства ИУ. Таким образом,
положение заслонки 4 относительно сопла 5 и давление Р вых в про-
цессе измерения в каждый момент соответствует значению измеряе-
мой физической величины. При минимальном усилии F заслонка
полностью открывает сопло, полость пневмоусилителя сообщается с
атмосферой и давление Р {) становится равным барометрическому
давлению.
Пределы измерения входного усилия F настраиваются перемеще-
нием подвижной опоры 2. Начальное значение выходного сигнала
Р, шх устанавливается натяжением пружины 3 (корректора нуля).
Для состояния равновесия рычага 1 можно записать

где F, F oc — усилия, развиваемые измерительным устройством ИУ и
сильфоном обратной связи /соответственно; l1, l2 — плечи этих уси-
лий. Усилие F nc может быть выражено как

где Р вых — давление выхода; Sэф— эффективная площадь сильфона
обратной связи 7.
Тогда давление выхода может быть представлено как

Диапазон изменения унифицированного пневматического сигна-
ла составляет 0,02 ... 0,1 МПа, поэтому при F= 0 с помощью натяже-
ния пружины 3 (корректора нуля) производится настройка нулевого
сигнала преобразователя. С учетом этой настройки окончательное
выражение для статической характеристики имеет вид

В пневмосиловом преобразователе можно изменять диапазон пре-
образования в пределах ± (10—20) % за счет изменения соотношения
l1 / l2 в результате перемещения точки опоры 2.
Дата: 2019-04-23, просмотров: 399.