Моментом силы относительно точки называется вектор, приложенный в этой точке, равный по величине произведению величины силы на кратчайшее расстояние от точки до линии действия силы, называемое плечом, направленный перпендикулярно к плоскости, проходящей через точку и силу, по правилу правого винта, т. е. в ту сторону, откуда совершаемый силой поворот тела, относительно точки виден против хода часовой стрелки. (рис.4)



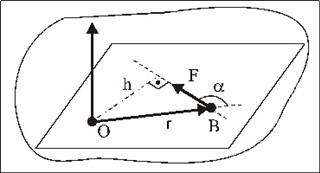
Рис.4.
 (3.1)
(3.1)
 Введем в рассмотрение радиус-вектор
Введем в рассмотрение радиус-вектор  , определяющий положение точки B – точки приложения силы
, определяющий положение точки B – точки приложения силы  .
.
(3.2)
В случае плоской системы сил величину момента силы относительно точки, лежащей в плоскости действия сил, можно рассматривать как алгебраическую величину, равную взятому со знаком плюс или минус произведению модуля силы на плечо:
 (3.3)
(3.3)
При этом величина момента берется со знаком плюс, если сила стремится осуществить поворот тела относительно точки против хода часовой стрелки и со знаком минус в противоположном случае.

Глава 2. Кинематика
Часть 1. Кинематика материальной точки.
§ 1. Векторный способ задания движения МТ.
Уравнение движения МТ.
Движение МТ при векторном способе задания движения определяется радиус-вектором этой МТ —  , который является функцией времени (уравнение движения):
, который является функцией времени (уравнение движения):
 . (1.1)
. (1.1)
Эта функция должна быть однозначной, непрерывной и дважды дифференцируемой. Размерность модуля радиус-вектора в системе СИ:  .
.
На рис. 1 изображены: точка О - произвольно выбранный, условно неподвижный полюс, точка В - положение МТ в момент времени t,  - радиус-вектор МТ.
- радиус-вектор МТ.

Рис. 1
Траектория МТ
Определение: Траекторией МТ называется геометрическое место ее последовательных положений в пространстве с течением времени.
При векторном способе задания движения траекторией МТ является годограф радиус-вектора.
Годографом любого вектора с неподвижным началом называется кривая, которую описывает конец этого вектора.
Скорость МТ
Рис. 2
На рис. 2 изображены: точка В – положение МТ в момент времени t, определяемое радиус-вектором  , точка В1 – положение МТ в момент времени t1, определяемое радиус-вектором
, точка В1 – положение МТ в момент времени t1, определяемое радиус-вектором  .
.
Пусть Dt = t1 – t – приращение времени, а  – приращение радиус-вектора, тогда
– приращение радиус-вектора, тогда
 называется средней скоростью МТ за промежуток времени Δt, направление которой совпадает с хордой ВВ1.
называется средней скоростью МТ за промежуток времени Δt, направление которой совпадает с хордой ВВ1.
Определение : Скоростью МТ в момент времени t называется предельное отношение  при
при  :
:  .
.
 . (1.2)
. (1.2)
Направление скорости МТ определяется предельным положением приращения радиус-вектора D при Dt®0 (В1®В) и, следовательно, совпадает с направлением касательной к траектории в точке В (рис.2).
Размерность модуля скорости в системе СИ: 
Ускорение МТ

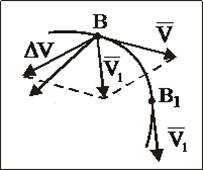
Рис. 3
На рис. 3 изображены:  - скорость МТ в момент времени t,
- скорость МТ в момент времени t,  – скорость МТ в момент времени t1.
– скорость МТ в момент времени t1.
Пусть Dt = t1 – t – приращение времени, а  – приращение скорости, тогда
– приращение скорости, тогда  называется средним ускорением МТ за промежуток времени Dt.
называется средним ускорением МТ за промежуток времени Dt.
Определение : Ускорением МТ в момент времени t называется предельное отношение  при
при 
 .
.
 . (1.3)
. (1.3)
Направление ускорения МТ определяется предельным положением приращения скорости  при Dt®0 (В1®В) и, следовательно,
при Dt®0 (В1®В) и, следовательно,  направлено в сторону вогнутости траектории (рис. 3).
направлено в сторону вогнутости траектории (рис. 3).
Размерность модуля ускорения в системе СИ:  .
.
Глава 3. ДИНАМИКА
Часть 1. Динамика МТ
Дата: 2019-03-05, просмотров: 366.