Цель: определение конфигурации и площади радиатора, применяемого для отвода тепла от наиболее теплонагруженного полупроводникового элемента.
Наиболее теплонагруженным элементом устройства является транзистор КТ815 ( VT 5), на котором выделяется мощность Р = 5 Вт. Для отвода тепла необходимо взять ребристый радиатор (хотя игольчатый, штыревой и спиральный радиаторы являются более эффективными, чем ребристый, но последний зато является более дешевым среди всех выше указанных).
Исходными данными для расчета ребристого радиатора являются:
Р = 5 Вт – мощность рассеяния транзистора КТ815;
Тос = 318 К - максимальная температура окружающей среды ;
Тк = 360,25 К – максимальная температура корпуса.
b = 0,008 м – расстояние между ребрами радиатора;
h = 0,02 м – высота ребер радиатора;
D = 0,04 м – длина ребер радиатора ( ширина радиатора );
δ = 0,003 м – толщина ребер радиатора;
1. Определим температуру радиатора
ТР = Т К – 0,25∙Р (35)
ТР = 360,25 – 0,25∙5 = 359 К
2. Определим составляющие общего коэффициента теплообмена.
1) Коэффициент теплообмена боковых плоскостей ребер:
 (36)
(36)


2) Коэффициент теплообмена торцевых плоскостей ребер:
 (37)
(37)
3) Коэффициент теплообмена при излучении :
 (38)
(38)

Тогда, общий коэффициент теплообмена:
a = 35,99 + 1,03 + 0,53 = 37,55 
3. Определяем площадь поверхности охлаждения радиатора:
 (39)
(39)
 м2
м2
4. Длина ребер радиатора:
 (40)
(40)
5. Количество ребер радиатора:
 (41)
(41)

Следовательно количество ребер радиатора будет составлять n = 4.
6. Ширина основания радиатора:
H = n × ( d + b ) – b (42)
H = 4 × (0,003+0,008) – 0,008 = 0,036 м
Вывод: рассчитали размеры радиатора для заданного транзистора: ширина основания радиатора по расчетам составила 36 мм, высота – 20 мм, длина ребер – 40 мм, толщина ребер – 3 мм, расстояние между ребрами – 8 мм, а количество рёбер 4 шт. Чертеж спроектированного радиатора изображен на ПТЭС 752694.001.
Расчет амортизации блока
Цель: Исходя из расчетов нагрузки на аппаратуру, подобрать амортизаторы и рассчитать их эффективность.
10 .1. Исходя из условий эксплуатации при механических воздействиях (класс РЭА – М3) определяю исходные данные.
Вибрации:
диапазон частот 1…55 Гц;
максимальное ускорение 2 g.
Ударные нагрузки:
максимальное ускорение 15 g;
длительность импульса 2…15 мс.
10 .2. Выбираем параллельный способ виброизоляции, который предполагает равномерное распределение массы ЭА между всеми амортизаторами (при этом обеспечивается минимальное количество амортизаторов и сокращение их номенклатуры, но возможно усиливание ударных нагрузок и виброперегрузок в диапазоне частот).
Рис. 1. Параллельный способ виброизоляции
10 .3. Статический расчёт.
10 .3.1. Выделим в конструкции прибора 3 наиболее тяжелых блока, это – блок печатной платы, блок задней панель, трансформатор ТПК-1.
Координаты центров тяжестей блоков показаны на рис.2, где
Xi, Yi, - координаты центра тяжести i-то блока;
1 – ПП; 2 – Задняя панель; 3 – Трансформатор.
Координаты первого блока – ( X =95 мм; Y =38,5 мм);
Координаты второго блока – ( X =47,5 мм; Y =103,5 мм);
Координаты третьего блока – ( X =140,5 мм; Y =103,5 мм);
Определим центр тяжести всего прибора исходя из выражения:
 ( 10 .1)
( 10 .1)
где n – число блоков,
Pi – статическая нагрузка каждого блока.
 , (10.2)
, (10.2)
где mi – масса i – го блока.
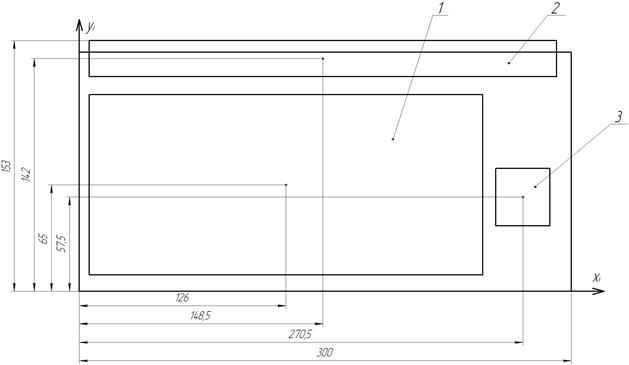
Рис.2 Координаты центров тяжести элементов блока
10.3.2. Определим массу каждого блока.
1) Печатная плата 1.
Масса элементов:  г.
г.
Масса печатной платы:
 , (10.3)
, (10.3)
где:  – плотность материала (для текстолита марок СФ),
– плотность материала (для текстолита марок СФ),
 , (10.4)
, (10.4)
где: t – толщина материала (для СФ2-35).

 .
.
Общая масса блока:
 (10.5)
(10.5)

2) Набор разъемов на задней панели.
Масса элементов:  г.
г.
3) Трансформатор.
Масса третьего блока:  г.
г.
10.3.3. Определим статическую нагрузку каждого блока:



10.3.4. Координаты центра тяжести всего прибора:


Координаты центра тяжести всего прибора будут: ( X =171 мм; Y =109 мм).
Установим прибор на четыре амортизатора (рис. 3),
где X , Y , Z - координаты центра тяжести всего прибора;
1 – первый амортизатор;
2 – второй амортизатор;
3 – третий амортизатор;
4 – четвёртый амортизатор.
Координаты точек крепления амортизаторов, относительно центра тяжести прибора будут:
Для первого – ( X = -151, Y = -89); для второго – ( X = -151, Y = 17); для третьего – ( X = 109, Y = 17); для четвертого – ( X = 109, Y = -89).
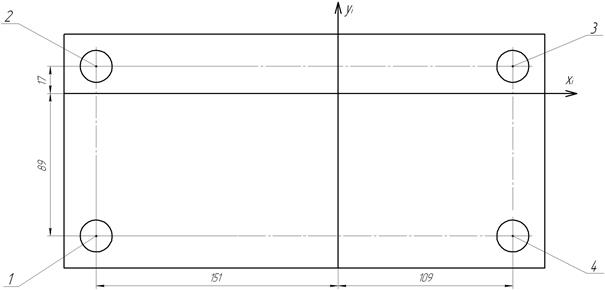
Рис. 3. Размеры установки амортизаторов относительно ЦТ блока
10.3.5. Рассчитаем весовые нагрузки, на каждый амортизатор исходя из выражения:
 , (10.6)
, (10.6)
где Pi - статистическая нагрузка i – го амортизатора;
G – вес блока;
 (10.7)
(10.7)

Xi, Yi – координаты амортизаторов относительно центра тяжести блока;
Получим систему уравнений:
Решая систему относительно нагрузок на амортизаторы, получим:
 (10.8)
(10.8)
где D - определитель системы уравнений; М1 , М2 , М3, М4 - миноры определителя D.
Определитель системы равен
 (10.9)
(10.9)
Найдём определитель системы:
Найдём миноры определителя:
Определитель системы равен:

Найдём весовые нагрузки на каждый амортизатор:

10.4. Исходя из весовых нагрузок выберем конкретный тип амортизаторов, с учётом выполнения условия:
 ,
,
где  - номинальное значение статической нагрузки для конкретного типоразмера амортизатора.
- номинальное значение статической нагрузки для конкретного типоразмера амортизатора.
10.5. Исходя из требований эксплуатации прибора выбирются амортизаторы типа АО -10 (рис 4).
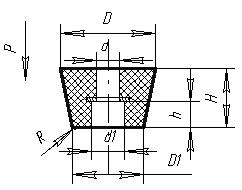
Рис.4 Амортизатор АО-10
Амортизаторы типа АО-10 работают на сжатие, имеют малые размеры и малый вес. Собственная частота при номинальной нагрузке 25 – 30Гц. Виброзащита осуществляется, начиная с частоты вибрации 25Гц при амплитуде вибрации до 0,5мм. Номинальная нагрузка амортизатора 10 кгс.
Таблица 10.1.
Параметры и массо-габаритные размеры амортизатора АО-10
| Обозначение | Номинальная нагрузка, (н) | Коэффициент жесткости, (н/мм) | Размеры, мм |
Масса, кг | ||||||
| H | h | D | D1 | d | d1 | R | ||||
| АО-10 | 10 | 6,5 | 9 | 5 | 14 | 12 | 3,5 | 7 | 1,5 | 0,001 |
Определим величину статистических прогибов:
 , (10.10)
, (10.10)
где Pi – весовая нагрузка i -го амортизатора;
Ki – коэффициент жесткости.
10.6. Динамическая оценка.
10.6.1. Определим собственную частоту недемпфированного блока на амортизаторах:
 , (10.11)
, (10.11)
где  – суммарная статическая жесткость амортизаторов H / m ;
– суммарная статическая жесткость амортизаторов H / m ;
М – масса;
 - суммарный статический прогиб амортизаторов;
- суммарный статический прогиб амортизаторов;

 (Гц)
(Гц)
10.6.2. Определим амплитуду вибрации:
 , (10.12)
, (10.12)
где i = 2 g – допустимая перегрузка,

10.6.3. Определим коэффициент динамичности амортизированной системы:
 , (10.13)
, (10.13)
где  - относительная частота,
- относительная частота,
 - частота вынужденных колебаний,
- частота вынужденных колебаний,
10.6.4. Определим эффективность виброизоляции:
 (10.14)
(10.14)

Вывод: исходя из полученных весовых нагрузок выбираем амортизаторы типа АО-10 на номинальную нагрузку 10 Н и коэффициент жесткости 6,5 Н/мм, которые обеспечат эффективную защиту от механических воздействий.
Дата: 2019-03-05, просмотров: 348.