Навигация и лоция
Методическое пособие
для курсантов первого курса
высших учебных заведений
по специальности 240200 "Судовождение"
Мурманск 2006
Составитель — А.А. Малышко, старший преподаватель кафедры судовождения
Мурманского государственного технического университета;
Курс лекций рассмотрен и одобрен кафедрой _____________ 2006 г., протокол № __
Рецензент — Юрий Иванович Юдин, кандидат технических наук, заведующий кафедры судовождения
© Мурманский государственный технический университет, 2006
Тема 1.1 Введение. Предмет навигации. Фигура и модели Земли.
Понятие о геоиде, земном эллипсоиде.
Изучение курса дисциплины «навигация и лоция» складывается из прослушивания лекций, выполнения лабораторных работ и самостоятельного изучения тем, указанных в «методических указаниях» для курсантов 1 курса, издательство МГТУ, 2005 год.
Время и место зарождения судоходства можно определить по сведениям, относящимся к 15-19 векам до нашей эры в странах прилегающих к Средиземному морю.
О первых русских мореплавателях известно с 907 года, когда Киевский князь Олег ходил военным походом на греков. В настоящее время наукой о проводке судов в море называют навигацией.
Навигация - наука о выборе пути, определении места и перемещении судна в море с учетом задач, решаемых судном, и влиянии внешней среды на направление и скорость судна. (Navigation – мореплавание, ездить по морю).
Суда во время плавания перемещаются по поверхности Мирового океана, которая является частью поверхности Земли. Поэтому все расчеты для плавания судна из одного пункта в другой производятся с учетом формы и размеров Земли.
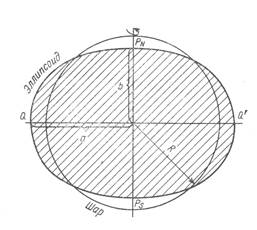
За форму Земли принимается фигура, которая образуется уровневой поверхностью Мирового океана, мысленно продолженной под материками и островами.
Установлено, что такая фигура имеет неправильную форму и не может быть описана общим математическим уравнением. Уникальность фигуры Земли обусловлена и ее названием - геоид, что по гречески означает «землеподобный».
При решении задач судовождения сложную фигуру геоида заменяют более простой правильной фигурой, поддающейся математическому описанию. Такой фигурой является Эллипсоид (сфероид) – фигура, образованная вращением эллипса вокруг его малой оси.
Эллипсоид, моделирующий Землю, называют земным эллипсоидом.
 Основными элементами земного эллипсоида являются размеры его большой (радиус экватора) и малой полуосей (половина земной оси вращения) величины а и в. В России с 1946 года введен референц - эллипсоид профессора Красовского:
Основными элементами земного эллипсоида являются размеры его большой (радиус экватора) и малой полуосей (половина земной оси вращения) величины а и в. В России с 1946 года введен референц - эллипсоид профессора Красовского:
а = 6378245 м;
в = 6356863 м;
полярное сжатие
 =
=  = 0,03352332;
= 0,03352332;
эксцентриситет
 = 0,00669336
= 0,00669336
Из-за различия фигур геоида и эллипсоида невозможно добиться полного совпадения всех точек их поверхностей. В разных странах за фигуру Земли принимают такие земные эллипсоиды, поверхности которых близко совпадают с поверхностью геоида на территории данной страны. Земной эллипсоид определенных размеров принятой в данном государстве за фигуру Земли, называют референц–эллипсоидом. Поверхность эллипсоида Красовского совмещена с поверхностью геоида в исходной точке, за которую принят центр Кругового зала Пулковской обсерватории. Отклонение референц–эллипсоида Красовского от соответствующих точек на поверхности геоида не превышают 150 м.
Элементы других наиболее распространенных референц – эллипсоидов приведены в следующей таблице:
| Референц-эллипсоид | Элементы эллипсоида | Элементы эллипсоида | Государства, в которых используется данный эллипсоид |
| Эйри (1930 г.) | 6377542 | 1/293,3 | Великобритания Ирландия |
| Бесселя (1841 г.) | 6377397 | 1/299,15 | Япония, Ю. Корея, ФРГ, Норвегия Швеция, Греция |
| Кларка(1980 г.) | 6378249 | 1/297,465 | Станы Африки Франция, Иран |
| Хейфорда (1909 г.) | 6378388 | 1/297 | Дания, Италия, Португалия |
| Южноамериканский ( 1969 г.) | 6378160 | 1/298 ,25 | Страны Южной Америки |
Для согласования результатов геодезических измерений, производимых в различных государствах, рассчитываются общеземные или международные референц - эллипсоиды, оптимальные по критерию минимума отклонения от поверхности геоида в целом.
В 1979 году на 17 Генеральной ассамблее Международной ассоциации геодезии (МАГ) была принята международная геодезическая референц - система 1980 г.:
а = 6378137 м,  =
=  .
.
Координаты одних и тех же объектов на картах, составленных для различных референц–эллипсоидов, не совпадают. Поэтому при решении задач судовождения переход с карты, составленной по материалам одного государства, на карту, составленную по данным другого государства, следует осуществлять не по координатам, а по пеленгу и расстоянию относительно нанесенного на карты ориентира.
За модель геоида может быть принята и более простая геометрическая фигура–сфера (шар). Погрешности перехода от геоида к шару могут считаться пренебрежимо малыми при решении ряда задач судовождения:
- при измерении расстояния в морских милях;
- при аналитическом счислении в экваториальной зоне;
- при расчете плавания по кратчайшему пути и др.
Тема 1.2 Система координат. Разность широт и разность долгот.
1.2.1 Основные точки, линии и круги Земли.
Земля вращается вокруг своей оси с запада на восток.
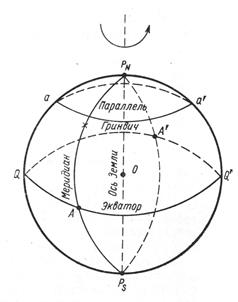 Эта ось пересекается с поверхностью Земли в двух точках РN и РS, называемых географическими полюсами. Точку РN называют Северным, или нордовым, полюсом N, а точку РS – Южным, или зюйдовым, S. Если рассечь земной шар плоскостью, проходящей через его центр (QQ1), то в сечении получится большой круг. Если же рассечь шар плоскостью, не проходящей через его центр (aa1), то в сечении получится малый круг. Окружность большого круга, плоскость которого перпендикулярна оси Земли, называется экватором (QQ1). Экватор делит земной шар на два полушария: Северное и Южное. Окружности малых кругов, плоскости которых параллельны плоскости экватора, называются параллелями (aa1). Окружности больших кругов, плоскости которых проходят через земные полюса, называются географическими, или истинными, меридианами.
Эта ось пересекается с поверхностью Земли в двух точках РN и РS, называемых географическими полюсами. Точку РN называют Северным, или нордовым, полюсом N, а точку РS – Южным, или зюйдовым, S. Если рассечь земной шар плоскостью, проходящей через его центр (QQ1), то в сечении получится большой круг. Если же рассечь шар плоскостью, не проходящей через его центр (aa1), то в сечении получится малый круг. Окружность большого круга, плоскость которого перпендикулярна оси Земли, называется экватором (QQ1). Экватор делит земной шар на два полушария: Северное и Южное. Окружности малых кругов, плоскости которых параллельны плоскости экватора, называются параллелями (aa1). Окружности больших кругов, плоскости которых проходят через земные полюса, называются географическими, или истинными, меридианами.
Через любую точку на земном шаре можно провести меридиан, называемый меридианом места. Меридиан, который проходит через астрономическую обсерваторию в г. Гринвиче (Великобритания) (Р NАР S), называется нулевым, или гринвичским меридианом. Этот меридиан делит вместе с противоположным ему меридианом (Р NА1Р S) земной шар на два полушария: Восточное и Западное. Если стать на гринвичском меридиане лицом к Р N, то вправо от наблюдателя будет Восточное полушарие, а влево – Западное.
1.2.2 Понятие географической широты и долготы.
Положение любой точки на земной поверхности определяется ее координатами – географической широтой и географической долготой.
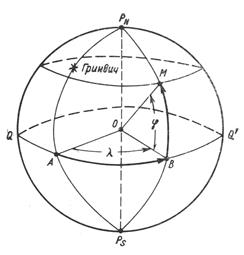 Возьмем на земной поверхности точку М и проведем через нее меридиан и параллель. Соединим точку М с центром Земли (точка О). Линия ОМ является радиусом Земли и отвесной линией наблюдателя в точке М.
Возьмем на земной поверхности точку М и проведем через нее меридиан и параллель. Соединим точку М с центром Земли (точка О). Линия ОМ является радиусом Земли и отвесной линией наблюдателя в точке М.
Географической широтой φ точки называется угол (МОВ), заключенный между отвесной линией данной точки и плоскостью экватора. Широта измеряется дугой меридиана от экватора до параллели точки (ВМ). Счет широт ведется от экватора к северу и югу от 0° до 90°. Северная широта обозначается буквой N (норд) и считается положительной (+), южная – буквой S (зюйд) и считается отрицательной (-). Широта определяет параллели данной точки.
Географической долготой λ точки называется угол (АОВ), заключенный между плоскостью гринвичского меридиана и плоскостью меридиана данной точки. Долгота измеряется меньшей из дуг экватора между гринвичским меридианом и меридианом данной точки (АВ). Счет долгот ведется от гринвичского меридиана к востоку и западу от 0° до 180°. Восточная долгота обозначается буквой Е (ост) и считается положительной (+), западная – буквой W (вест) и считается отрицательной (-). Долгота определяет положение меридиана данной точки.
1.2.3 Другие системы координат точек, применяемые в судовождении.
Существует несколько систем координат для определения положения точки на земной поверхности, применяемые в судовождении: географическая, прямоугольная и геоцентрическая. Рассмотренная выше система называется географической.
Прямоугольная система координат определяет положение точки А на земной поверхности координатами А (x; y; z). За начало координат принимается центр Земли. Ось OZ совпадает с осью O Р N, ось OX в плоскости экватора и начального меридиана, а ось OY в плоскости экватора и перпендикулярна плоскости начального меридиана. Эта система применяется при теоретических выводах.
Геоцентрическая система координат относится к эллипсоиду и применяется в задачах, связанных с построением некоторых картографических проекций. Положение точки в этой системе определяется двумя координатами – геоцентрической широтой и географической долготой. Геоцентрической широтой называется угол между плоскостью экватора и прямой, соединяющую данную точку с центром земного эллипсоида. Разность между географической и геоцентрической широтами называется редукцией широты.
 =
=  , где
, где  - полярное сжатие,
- полярное сжатие,  - географическая широта.
- географическая широта.
1.2.4 Определение разности широт и разности долгот.
Координаты судна во время плавания непрерывно меняются. Изменение широт и долгот судна называются разностями широт и долгот.
 Разность широт (РШ) двух точек на земной поверхности измеряется дугой меридиана, заключенной между параллелями этих точек. Если широты пунктов отхода и прихода судна одноименные, т. е. обе широты - N или S, то РШ численно равна разности большей и меньшей широт этих точек (В и А на рис.). Если же пункты отхода и прихода расположены в разных полушариях, т. е. их широты разноименные, то РШ численно равна сумме широт двух точек (С и D на рис.).
Разность широт (РШ) двух точек на земной поверхности измеряется дугой меридиана, заключенной между параллелями этих точек. Если широты пунктов отхода и прихода судна одноименные, т. е. обе широты - N или S, то РШ численно равна разности большей и меньшей широт этих точек (В и А на рис.). Если же пункты отхода и прихода расположены в разных полушариях, т. е. их широты разноименные, то РШ численно равна сумме широт двух точек (С и D на рис.).
Наибольшее значение РШ 180°, что соответствует перемещению судна с одного полюса в другой. Если судно перемещалось по какой-либо одной параллели, то РШ равна 0°. Вычисленной РШ приписывается наименование «к N» (+) или «к S» (-) в зависимости от того, в каком направлении перемещалось судно.
Разность долгот РД двух точек на земной поверхности измеряется меньшей из дуг экватора, заключенных между меридианами этих точек. Если долготы пунктов отхода и прихода одноименные, т. е. обе Е или W, то РД численно равна разности большей и меньшей долгот этих точек (В к А на рис.).
 Если же пункты отхода и прихода расположены в различных полушариях, т. е. долготы разноименные, то РД численно равна сумме долгот этих точек (С и D на рис.). Так как за РД принимается всегда меньшая из дуг экватора, то ее значение не может превышать 180°. Если при сложении разноименных долгот получено значение, большее 180°, то за РД принимается дополнение до 360°. Такой случай может возникнуть при пересечении судном меридиана 180°. Вычисленному значению РД также приписывается наименование «к Е» (+) или «к W» (-) в зависимости от того, в каком направлении перемещалось судно.
Если же пункты отхода и прихода расположены в различных полушариях, т. е. долготы разноименные, то РД численно равна сумме долгот этих точек (С и D на рис.). Так как за РД принимается всегда меньшая из дуг экватора, то ее значение не может превышать 180°. Если при сложении разноименных долгот получено значение, большее 180°, то за РД принимается дополнение до 360°. Такой случай может возникнуть при пересечении судном меридиана 180°. Вычисленному значению РД также приписывается наименование «к Е» (+) или «к W» (-) в зависимости от того, в каком направлении перемещалось судно.
Если северной широте и восточной долготе условно приписать знак «+», а южной широте и западной долготе — знак «-», то значения РШ и РД можно вычислить по следующим алгебраическим формулам:
РШ = φ2 – φ1;
РД = λ 2 - λ 1 ;
где φ2, λ 2 и φ1, λ 1 соответственно координаты конечной и начальной точек плавания.
Знак результата, полученного при вычислении по формулам, покажет наименования РШ и РД. Если при вычислении РД берется дополнение до 360°, то наименование РД изменяется.
Пример 1. Судно вышло из пункта А с координатами φ1 = 12°15'N и λ 1 = 55°42,5'W и пришло в пункт В с координатами φ2 = 8°26,5'S и λ 2 = 22°07' W. Определить РШ и РД. Решение:
φ2 = 8°26,5' λ 2 = 22°07'
- -
φ1 = 12°15' λ 1 = 55°42,5'
_____________________________________________________________
РШ = - 20°41,5' = 20°41,5'к S РД = + 33°35,5' = 33°35,5' к Е
Тема 1.3 Морские единицы длины и скорости.
В навигации удобно использовать такую единицу длины, которая позволила бы выражать расстояние одним и тем же числом, как в линейной, так и в угловой мере, поэтому в качестве основной единицы длины для измерения расстояний в море принята морская миля, равная одной длине минуты дуги географического меридиана (земля принята за шар).
Однако длина одной минуты меридиана на земном эллипсоиде (эллипсоиде Красовского) является величиной переменной, зависящей от широты. С достаточной точностью ее можно получить по формуле:
1' = 1852,25 - 9.31Соs2φ, где φ – широта места судна в градусах
на полюсах 1' = 1861.6 м – мах
на экваторе 1' = 1842.9 м – мin
на φ = 45 градусам 1' = 1852.2 м
Пользование на практике переменной по величине единицей длины неудобно. Поэтому за морскую милю принимают величину постоянную.
В 1929 г. Международное географическое бюро в качестве международной морской мили приняло округленное значение ее средней величины, равное 1852 м. К этому решению присоединилось большинство стран, в том числе и СССР (в 1932 г.).
Полагая, 1' = 1852 м, мы по существу заменяем земной эллипсоид шаром, имеющим радиус
R =  = 6366707 м.
= 6366707 м.
Следовательно, международная, стандартная морская миля – это длина одной минуты дуги меридиана земного шара, радиус которого равен 6366707 м.
Некоторые страны не присоединились к решению Международного гидрографического бюро. Так в Англии и Японии принята 1' = 6080 фут = 1853.18 м. В Италии, Дании, Нидерландах I’ = 1851.85 м, в Португалии 1' = 1850.0 м, в Англии и США 1 сухопутная уставная миля = 1609,344 м.
Одна десятая часть морской мили называется морским кабельтовым.
1 кбт = 185.2 м.
При артиллерийских и торпедных стрельбах применяется артиллерийский кабельтов 1 арт.кбт = 182,88 м .
В иностранных флотах применяются следующие единицы длины:
Дюйм – ½ фута - 2.54 см
1 фут = 30,48 см (1 м = 3,281 фута) – для обозначения высот ориентиров на берегу и малых глубин на английских морских картах.
1 морская сажень = 1.83 м 6 футов (1 м = 0,547 морских саженей ) – для обозначения глубин на английских морских картах.
1 статутная (береговая) миля = 1609,4 м – для измерения расстояний на суше (Англия и США).
1 ярд = 91.44 см = 3 футам – для измерения небольших расстояний в Англии.
Соотношения между различными единицами длины даны в таблице 5.6 МТ –2000.
В качестве единицы скорости в навигации принимают узел.
1 узел = 
Так в качестве основной единицы длины в навигации принята морская миля, то скорость судна выражается числом миль, пройденных в час.
Под воздействием собственных двигателей судно перемещается относительно воды со скоростью Vо, которая называется относительной скоростью.
Под воздействием течения судно вместе с массой воды перемещается относительно земной поверхности со скоростью - Vт. Скорость перемещения судна под воздействием течения называется переносной скоростью.
Под суммарным воздействием двигателей, течения и ветра судно перемещается относительно земной поверхности со скоростью V, которая называется путевой скоростью.
Тема 1.4 Основные линии и плоскости наблюдателя.
Счет направлений в море. Истинные курсы и пеленги. Курсовые углы.
Для ориентирования в море принята система условных плоскостей и линий наблюдателя.
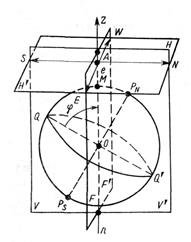
На рисунке показана земля , Pn Ps – земная ось, в точке А находиться наблюдатель на широте φ. Линия АО – отвесная линия.
Вертикальная плоскость, проходящая через место наблюдателя и земную ось, называется плоскостью истинного меридиананаблюдателя.
Плоскость, перпендикулярная отвесной линии и проходящая через точку А наблюдателя, называется плоскостью истинного горизонта наблюдателя.
Плоскости истинного горизонта и меридиана наблюдателя пересекаются по линии NS называемой линией истинного меридиана. Ее направление в любой точке Земли
указывает на северный и южный полюсы.
Вертикальная плоскость, перпендикулярная плоскости истинного меридиана, называется плоскость первого вертикала, а ее пересечение с плоскостью истинного горизонта дает направление EW. Линии NS и EW делят плоскость истинного горизонта на 4 четверти NE, NW, SE, SW. Все направления в плоскости истинного горизонта принято определять по отношению к линии истинного меридиана NS.
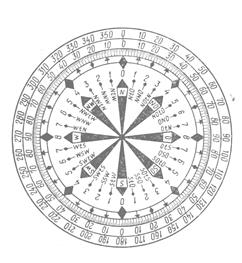
Еще в древние времена каждая четверть горизонта делилась на восемь частей, а следовательно, весь горизонт – на 32 части. Эти 32 направления получили название румбов, каждый из которых составляет 360º/ 32 = 11,25º градуса.
 В судовождении используются различные системы счета направлений: румбовая, круговая, полукруговая и четвертная.
В судовождении используются различные системы счета направлений: румбовая, круговая, полукруговая и четвертная.
В румбовой системе весь горизонт делится на Румбы, отсчитывают от N или S в сторону Е или W от 0º до 8º . Румбы N,E,S,W называют главными, румбы NE,SE,NW,SW – четвертными, остальные 24 – промежуточные румбы. Эта система счета применяется для указаний направлений ветра, волнения и течения. В МТ-2000 в таблице помещены названия румбов и их градусные выражения( смотрите рисунок ).
В круговой системе весь горизонт делят на 360º градусов, счет направлений ведется от нордовой части истинного меридиана по часовой стрелке от 0ºдо 360º градусов.
В полукруговой системе счет направлений ведется от нордовой или зюйдовой части истинного меридиана в сторону E или W от 0ºдо 180º градусов. Направления обозначаются величиной угла в градусах и наименованием (от какой части истинного меридиана и в какую сторону отсчитано данное направление);например N120º W, S 130ºE.
В четвертной системе счет направлений ведется от нордовой или зюйдовой части истинного меридиана в сторону Е или W от 0ºдо 90º градусов.

Например S NW28º, NE 38º, SW76º, SE52º.
Перевод направлений из одной системы счета в другую производится логически на основании рисунка. Например: 150º = SE 30º = S 30º E = N 150º E.
Направления на поверхности Земли определяют путем измерения горизонтальных углов между плоскостью истинного меридиана наблюдателя и вертикальной плоскостью, проведенной через тот или иной ориентир. В судовождении в основном приходится иметь дело с направлением движения судна и направлением на какой-либо ориентир.
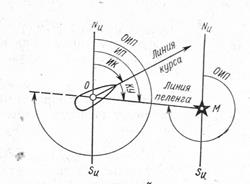 Истинный курс (ИК) – угол в плоскости истинного горизонта между северной частью истинного меридиана (Nи) и носовой частью продольной оси судна. Отсчитывается в круговой системе счёта от 0º до 360º (по часовой стрелке).
Истинный курс (ИК) – угол в плоскости истинного горизонта между северной частью истинного меридиана (Nи) и носовой частью продольной оси судна. Отсчитывается в круговой системе счёта от 0º до 360º (по часовой стрелке).
Истинный пеленг (ИП) – угол в плоскости истинного горизонта между северной частью истинного меридиана (Nи) и направлением на объект. Отсчитывается в круговой системе счёта от 0º до 360º (по часовой стрелке).
Направление, отличающееся на 180º от истинного пеленга, называется обратным истинным пеленгом (ОИП). ОИП=ИП  180º.
180º.
Курсовой угол (КУ) - угол в плоскости истинного горизонта между носовой частью продольной оси судна и направлением на ориентир. Отсчитывается в полукруговой системе счёта от 0º до 180º правого и левого бортов. КУ правого борта имеет знак (+), левого борта знак (-).
Из рисунка видно, что между ИП, ИК, и КУ имеются следующие соотношения:
ИП = ИК + (-КУ) ИК = ИП – (-КУ) КУ = ИП - ИК
В формулах алгебраически, необходимо учитывать знак КУ. Если при расчёте ИП или ИК, получается со знаком (-), то берётся их дополнение до 360º.
КУ = 90º любого борта называется траверзом. Направление, перпендикулярное ДП судна называется траверзным направлением.
В судовождении также используют термины «линия курса» и «линия курса».
Линия курса – это след от пересечения диаметральной плоскости судна с плоскостью истинного горизонта.
Линия пеленга - след от пересечения плоскости истинного горизонта с вертикальной плоскостью, проходящей через судно и ориентир.
Тема № 2.1 Земной магнетизм и его элементы. Склонение и его изменяемость. Магнитные вариации и бури. Магнитные карты и пользование ими. Магнитные аномалии. Магнитные курсы и пеленги. Переход от истинных направлений к магнитным, и обратно.
Земля представляет собой огромный магнит, имеющий два полюса (рис. 2.1.1).
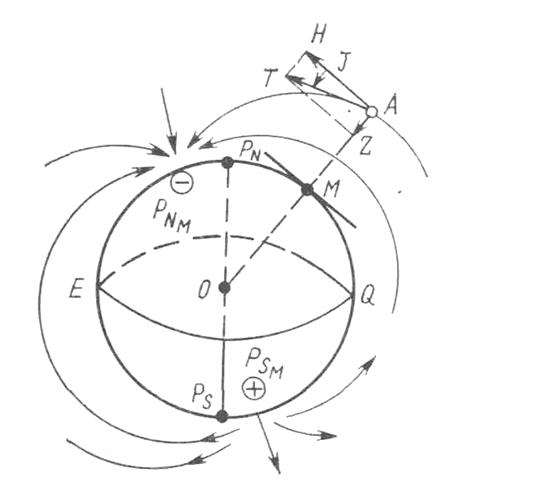
Магнитные полюса не совпадают с географическими, причем они постепенно изменяют свое положение. В 1970 г. координаты проекции северного магнитного полюса Земли приблизительно составляли φ 75° N и λ = 101° W , южного — φ = 65° S и λ = 140° E. Условились считать, что южный магнитный полюс положительный, а северный — отрицательный. Силовые линии магнитного поля Земли выходят из южного магнитного полюса PS м и замыкаются в северном PN м.
Магнитное поле в каждой точке характеризуется значением его напряженности Т. Вектор Т располагается всегда по касательной к силовой линии. Полную напряженность магнитного поля Земли можно разложить на горизонтальную H и вертикальную Z составляющие. Составляющая Н удерживает помещенную в поле Земли магнитную стрелку в направлении магнитной силовой линии. Это использовано в устройстве магнитных компасов. Составляющая Z наклоняет стрелку. При этом Н = = Т cos J и Z = Т sin J , где угол J — магнитное наклонение.
Из-за несовпадения магнитных и географических полюсов в общем случае магнитная стрелка компаса отклоняется на некоторый угол от плоскости истинного меридиана.
Вертикальная плоскость, проходящая через полюсы магнитной стрелки, называется плоскостью магнитного меридиана. В пересечении с плоскостью истинного горизонта эта плоскость образует линию магнитного меридиана NM - SM (рис. 2.1.2).
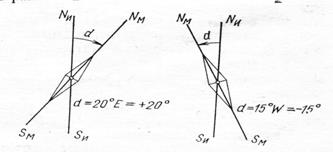
Магнитная стрелка, т. е. магнитный меридиан, отклоняется от истинного меридиана на различные углы. Угол между истинным и магнитным меридианами называется магнитным склонением d . Если северная часть магнитного меридиана NM отклонена от N И к востоку, то склонение имеет наименование Е и ему приписывается знак «+», к западу — наименование W и знак « - ». Склонение может иметь значение от 0 до 180°, но в большинстве районов не превышает 25°Е или W .
Свободно подвешенная магнитная стрелка наклоняется в плоскости магнитного меридиана, причем в Северном полушарии N -М концом вниз, а в Южном — S -м. Это явление называется магнитным наклонением. Углы наклонения увеличиваются с приближением к магнитным полюсам. На магнитных полюсах стрелка принимает вертикальное положение.
Для всех районов Земли издаются специальные магнитные карты. На этих картах проведены линии равного значения элементов земного магнетизма. Кривые линии, соединяющие точки с одинаковым значением склонения, называются изогонами, а кривые, соединяющие места с нулевым магнитным склонением, - агонами. Магнитные карты, на которых приведены данные о магнитном склонении, называются изогоническими. Кривые линии, соединяющие места с одинаковым магнитным наклонением, называются изоклинами. Нулевая изоклина называется магнитным экватором. Магнитные карты, на которых приведены данные о магнитном наклонении, называются изоклиническими.
Магнитный экватор является замкнутой кривой неправильной формы, пересекающей географический экватор в двух точках. На магнитном экваторе горизонтальная составляющая напряженности магнитного поля Земли имеет наибольшую величину, а на магнитных полюсах равна нулю. Поэтому магнитный компас лучше работает вблизи магнитного экватора и не работает в районах магнитных полюсов.
Все элементы земного магнетизма не остаются постоянными, со временем изменяются, поэтому магнитные карты приводятся к определенной эпохе (году). Из трех элементов земного магнетизма важнейшим для судоводителя является склонение. Поэтому его указывают также на навигационных картах. При этом даются величина магнитного склонения, год приведения и величина годового изменения. В некоторых районах величина магнитного склонения резко отличается от магнитного склонения окружающих мест. Это явление называется магнитной аномалией. Границы районов магнитной аномалии указываются на навигационных картах кривой жирной линией. В таких местах судоводитель должен быть внимательным при использовании магнитных компасов. Также неоднократно наблюдались кратковременные резкие колебания элементов земного магнетизма – магнитные бури, которые происходят из-за аномальных выбросов на солнце.
Величину магнитного склонения находят по навигационной карте. Данные о склонении наносят различными способами: указывают в заголовке карты, в центре истинных картушек и без изображения картушек. Прежде чем приступить к прокладке пути судна, необходимо привести склонения к году плавания. Для получения склонения на год плавания пользуются формулой
d = d '± nΔ d
где d ' — склонение, указанное на карте;
п — количество лет, прошедших от года, к которому приводится склонение,
до года плавания;
Δ d — годовое изменение склонения.
Пример 1: На карте d = 5,2° E (отнесено к 1999 г.). Годовое увеличение 0,2°.
Привести склонение к 2005 г.
Решение: d 2005 = d '1999+ nΔ d d '1999= 5,2° E
+
n =2005 – 1999 = 6 лет; nΔ d=+1,2°
Δ d = + 0,2° d 2005 = 6,4° E
Пример 2: На карте d = 1,2° E (отнесено к 1996 г.). Годовое уменьшение
0,25°.
Привести склонение к 2005 г.
Решение: d 2005 = d '1996+ nΔ d d '1996= 1,2° E
+
n =2005 – 1996 = 9 лет; nΔ d=-2,25°
Δ d = - 0,25° d 2005 = 1,05° W
Склонение, уменьшаясь, достигло нуля и перешло в склонение другого,
западного наименования.
Приведенное к году плавания склонение записывают на карте простым карандашом. Если место судна находится в районе между двумя значениями склонения, то нужное значение определяют путем интерполяции. Магнитное склонение в изученных морях известно с точностью до ± 0,25°, а в океанах, которые менее изучены в магнитном отношении,— до ± (2 - 3)°.
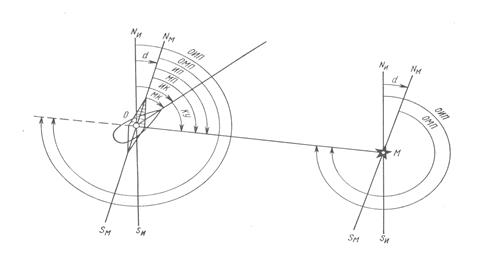
Направление движения судна и направление на ориентиры можно определять не только по отношению к истинному меридиану, но и к магнитному. На плоскости истинного горизонта эти направления изображаются плоскими углами.
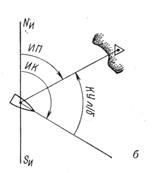
Угол, отсчитываемый по часовой стрелке от нордовой части магнитного меридиана до носовой части ДП судна, называется магнитным курсом (МК), а от нордовой части магнитного меридиана до направления на ориентир — магнитным пеленгом (МП) (Рис.2.1.3). Угол, отличающийся от магнитного пеленга на 180°, называется обратным магнитным пеленгом (ОМП).
ОМП = МП± 180°; МП=ОМП± 180°.
Указанные углы могут иметь значения от 0 до 360°. Между МП, МК. и КУ имеется следующее соотношение:
МП=МК± КУ, КУ правый борт – «+ », левый борт – « - ».
Зная магнитные направление и склонение в данном месте Земли, можно получить истинное направление, и наоборот, зная истинное направление и склонение, можно получить магнитное направление. Зависимости между этими направлениями выражаются алгебраическими формулами:
ИК = МК + d; МК = ИК – d;
ИП = МП + d; МП = ИП - d ;
ОИП= ОМП + d; ОМП=ОИП – d .
Пользуясь формулами, можно рассчитать и значение склонения:
d=ИК – МК = ИП – МП = ОИП – ОМП.
Аналитическое решение задач следует контролировать их графическим решением.
Направления. Таблица девиации. Поправка компаса. Перевод и исправление румбов. Контроль за работой в море. Определение поправки компаса из наблюдений (по пеленгу створа, по отдаленному ориентиру, по счислению).
Девиация магнитного компаса
Магнитное поле Земли, которое устанавливает стрелку компаса в определенном направлении, в то же время воздействует и на стальной корпус судна и на все находящиеся на нем стальные предметы. В результате ось стрелки магнитного компаса устанавливается по равнодействующей сил обоих полей. Такое отклонение стрелки от магнитного меридиана называется девиацией магнитного компаса.
Вертикальная плоскость, проходящая через магнитную ось картушки компаса, установленного на судне, называется плоскостью компасного меридиана. След от пересечения плоскости компасного меридиана с плоскостью истинного горизонта называется компасным меридианом и обозначается Nk – Sk (рис.2.2.1).
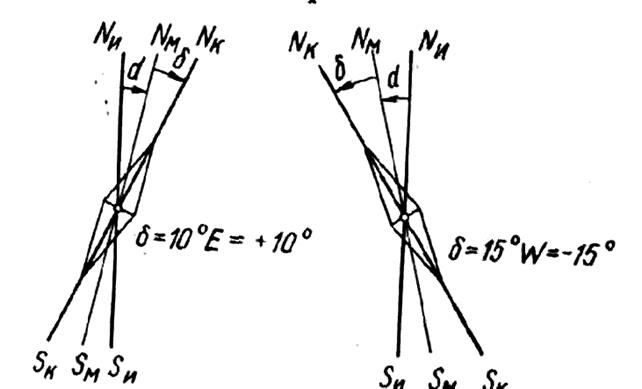
Угол между магнитным и компасным меридианом называется девиацией магнитного компаса δ .
Девиация может иметь значение от 0 до 180º к E и W . Если северная часть компасного меридиана Nk отклонена от NM к востоку, то девиация имеет наименование E и ей приписывается знак «+». Если Nk отклонен от NM к западу, то девиация имеет наименование W , ей приписывается знак «-». Величина и знак девиации магнитного компаса зависят от ряда факторов.
На каждом курсе девиация будет различной. Это объясняется тем, что при изменении курса меняется положение судового железа относительно магнитных стрелок компаса. Кроме того, после поворота судна судовое железо частично перемагничивается, что также приводит к изменению магнитного поля судна. Девиация изменяется на одном и том же курсе при перемене широты места, что связано с изменением напряженности магнитного поля Земли и, следовательно, изменением намагниченности судового железа, а также при каждой погрузке или выгрузке грузов, обладающих магнитными свойствами, при длительной стоянке судна на ремонте, при проведении электросварочных работ вблизи компасов, при сильном сотрясении корпуса судна.
Таблица девиации.
Наличие значительной по величине девиации препятствует нормальной эксплуатации магнитного компаса, поэтому ее периодически компенсируют (уничтожают) путем создания искусственных магнитных полей противоположного направления.
Полностью девиацию уничтожить невозможно. Девиация, оставшаяся после проведения девиационных работ называется остаточной. Она определяется из наблюдений, как правило, на 8 равностоящих компасных курсах. После обработки результатов составляется таблица остаточной девиации с точностью до 0,1º. Остаточная девиация не должна превышать ± 3º.
Аргументом для входа в таблицу служит КК судна.
| КК, град | δ, град | КК, град | δ, град | КК, град | δ, град | КК, град | δ, град |
| 0 | - 0,2 | 90 | - 1,3 | 180 | + 1,7 | 270 | + 2,3 |
| 15 | - 0,5 | 105 | - 1,2 | 195 | + 2,3 | 285 | + 1,8 |
| 30 | - 0,8 | 120 | - 0,9 | 210 | + 2,7 | 300 | + 1,4 |
| 45 | - 1,0 | 135 | - 0,4 | 225 | + 2,9 | 315 | + 0,9 |
| 60 | - 1,2 | 150 | + 0,3 | 240 | + 2,9 | 330 | + 0,5 |
| 75 | - 1,3 | 165 | + 1,0 | 255 | + 2,7 | 345 | + 0,1 |
| 90 | - 1,3 | 180 | + 1,7 | 270 | + 2,3 | 360 | - 0,2 |
Когда КК судна неизвестен, в таблицу входят с магнитным курсом МК, выбирают δ, рассчитывают первый приближенный КК и вновь входят в таблицу с этим приближенным курсом и выбирают уточненные значение девиации.
Если на судне имеются размагничивающие устройства, то остаточную девиацию определяют дважды с включенными и выключенными обмотками этого устройства.
Направлений.
На судне устанавливается гирокомпас, работающий на основном свойстве гироскопа (на больших оборотах ось ротора сохраняет свое направление). Ось ротора устанавливается по истинному меридиану.
Угол, отсчитываемый по часовой стрелке от нордовой части гирокомпасного меридиана до носовой части ДП судна, называется гирокомпасным курсом (ГКК). Угол, отсчитываемый от нордовой части гирокомпасного меридиана до направления на ориентир, называется гирокомпасным пеленгом (ГКП). Гирокомпасные курсы и пеленги могут иметь значения от 0 до 360º. Угол, заключенный между истинным и гирокомпасным меридианами, называется поправкой гирокомпаса Δ ГК.
Если северная часть гирокомпасного меридиана NГ отклонена от NИ к востоку, то поправка компаса имеет наименование Е и ей приписывается знак «+», к западу – наименование W и знак «-».
Δ ГК = Δ + δv , где
Δ – постоянная поправка компаса, дается в условии;
δv – скоростная девиация, выбирается из таблиц скоростной девиации № 1, 2, 3. Если не указана таблица, скоростную девиацию определять по широте. При включенном корректоре скоростная девиация равна 0, ( Δ ГК = Δ ) .
В таблицу скоростной девиации входить по аргументам (ИК и V л). Если неизвестен ИК, а есть ГКК, то входить в таблицу по (ГКК + Δ ) и V л. Знак девиации сверху таблицы.
| ИК = ГКК + Δ ГК | ГКК = ИК - Δ ГК |
| ИП = ГКП + Δ ГК | ГКП = ИП - Δ ГК |
Продолжительности плавания.
Если на судне нельзя воспользоваться лагом, то скорость хода судна относительно воды определяют по частоте вращения гребных винтов, используя для этого график или таблицу соответствия скорости хода частоте вращения гребных винтов.
Пройденное расстояние вычисляется по формуле Sоб = Vоб* t, где
Vоб – скорость хода, определенная по оборотам винтов;
t – продолжительность плавания.
График зависимости Vо = φ(N) составляется по результатам скоростных испытаний судна при заданном водоизмещении. Следует иметь ввиду, что эта зависимость изменяется под влиянием ряда факторов:
1. Волнение и встречный ветер, а также сильный попутный ветер уменьшает скорость судна.
2. Загрузка и дифферент судна. В хорошую погоду скорость судна в балласте обычно несколько больше, чем в полном грузу, но с усилением ветра и волнения порожнее судно теряет скорость значительно быстрее из-за большого воздушного сопротивления и худшей работе винта (оголение). Дифферент на корму для судна в балласте увеличивает скорость.
3. Обрастание корпуса судна увеличивает сопротивление воды и скорость падает. Через 6 месяцев в средних широтах скорость судна уменьшается на 5 – 10%. В тропических морях падение скорости значительно больше.
4. Мелководье. При ограниченной глубине под килем судна сопротивление воды движению судна увеличивается и скорость падает. Наименьшая глубина Н мин, при которой влияние мелководья не сказывается должна быть Нмин ≥ 6Т, где Т – осадка судна.
Содержание
| Наименование | Номер страницы |
| Тема 1.1 Введение. Предмет навигации. Фигура и модели Земли. Понятие о геоиде, земном эллипсоиде. | 3 |
| Тема 1.2 Система координат. Разность широт и разность долгот. | 5 |
| Тема 1.3 Морские единицы длины и скорости. | 8 |
| Тема 1.4 Основные линии и плоскости наблюдателя. Счет направлений в море. Истинные курсы и пеленги. Курсовые углы. | 10 |
| Тема 1.4 Основные линии и плоскости наблюдателя. Счет направлений в море. Истинные курсы и пеленги. Курсовые углы. | 12 |
| Тема № 2.1 Земной магнетизм и его элементы. Склонение и его изменяемость. Магнитные вариации и бури. Магнитные карты и пользование ими. Магнитные аномалии. Магнитные курсы и пеленги. Переход от истинных направлений к магнитным, и обратно. | 18 |
| Тема № 2.2 Девиация магнитного компаса. Компасные направления. Таблица девиации. Поправка компаса. Перевод и исправление румбов. Контроль за работой в море. Определение поправки компаса из наблюдений (по пеленгу створа, по отдаленному ориентиру, по счислению). | 22 |
| Тема № 2.3 Определение пройденного расстояния в море. | 28 |
| Список использованной литературы. | 31 |
Навигация и лоция
Методическое пособие
для курсантов первого курса
высших учебных заведений
по специальности 240200 "Судовождение"
Мурманск 2006
Составитель — А.А. Малышко, старший преподаватель кафедры судовождения
Мурманского государственного технического университета;
Курс лекций рассмотрен и одобрен кафедрой _____________ 2006 г., протокол № __
Рецензент — Юрий Иванович Юдин, кандидат технических наук, заведующий кафедры судовождения
© Мурманский государственный технический университет, 2006
Тема 1.1 Введение. Предмет навигации. Фигура и модели Земли.
Понятие о геоиде, земном эллипсоиде.
Изучение курса дисциплины «навигация и лоция» складывается из прослушивания лекций, выполнения лабораторных работ и самостоятельного изучения тем, указанных в «методических указаниях» для курсантов 1 курса, издательство МГТУ, 2005 год.
Время и место зарождения судоходства можно определить по сведениям, относящимся к 15-19 векам до нашей эры в странах прилегающих к Средиземному морю.
О первых русских мореплавателях известно с 907 года, когда Киевский князь Олег ходил военным походом на греков. В настоящее время наукой о проводке судов в море называют навигацией.
Навигация - наука о выборе пути, определении места и перемещении судна в море с учетом задач, решаемых судном, и влиянии внешней среды на направление и скорость судна. (Navigation – мореплавание, ездить по морю).
Суда во время плавания перемещаются по поверхности Мирового океана, которая является частью поверхности Земли. Поэтому все расчеты для плавания судна из одного пункта в другой производятся с учетом формы и размеров Земли.
За форму Земли принимается фигура, которая образуется уровневой поверхностью Мирового океана, мысленно продолженной под материками и островами.
Установлено, что такая фигура имеет неправильную форму и не может быть описана общим математическим уравнением. Уникальность фигуры Земли обусловлена и ее названием - геоид, что по гречески означает «землеподобный».
При решении задач судовождения сложную фигуру геоида заменяют более простой правильной фигурой, поддающейся математическому описанию. Такой фигурой является Эллипсоид (сфероид) – фигура, образованная вращением эллипса вокруг его малой оси.
Эллипсоид, моделирующий Землю, называют земным эллипсоидом.
Основными элементами земного эллипсоида являются размеры его большой (радиус экватора) и малой полуосей (половина земной оси вращения) величины а и в. В России с 1946 года введен референц - эллипсоид профессора Красовского:
а = 6378245 м;
в = 6356863 м;
полярное сжатие
= = 0,03352332;
эксцентриситет
= 0,00669336
Из-за различия фигур геоида и эллипсоида невозможно добиться полного совпадения всех точек их поверхностей. В разных странах за фигуру Земли принимают такие земные эллипсоиды, поверхности которых близко совпадают с поверхностью геоида на территории данной страны. Земной эллипсоид определенных размеров принятой в данном государстве за фигуру Земли, называют референц–эллипсоидом. Поверхность эллипсоида Красовского совмещена с поверхностью геоида в исходной точке, за которую принят центр Кругового зала Пулковской обсерватории. Отклонение референц–эллипсоида Красовского от соответствующих точек на поверхности геоида не превышают 150 м.
Элементы других наиболее распространенных референц – эллипсоидов приведены в следующей таблице:
| Референц-эллипсоид | Элементы эллипсоида | Элементы эллипсоида | Государства, в которых используется данный эллипсоид |
| Эйри (1930 г.) | 6377542 | 1/293,3 | Великобритания Ирландия |
| Бесселя (1841 г.) | 6377397 | 1/299,15 | Япония, Ю. Корея, ФРГ, Норвегия Швеция, Греция |
| Кларка(1980 г.) | 6378249 | 1/297,465 | Станы Африки Франция, Иран |
| Хейфорда (1909 г.) | 6378388 | 1/297 | Дания, Италия, Португалия |
| Южноамериканский ( 1969 г.) | 6378160 | 1/298 ,25 | Страны Южной Америки |
Для согласования результатов геодезических измерений, производимых в различных государствах, рассчитываются общеземные или международные референц - эллипсоиды, оптимальные по критерию минимума отклонения от поверхности геоида в целом.
В 1979 году на 17 Генеральной ассамблее Международной ассоциации геодезии (МАГ) была принята международная геодезическая референц - система 1980 г.:
а = 6378137 м, = .
Координаты одних и тех же объектов на картах, составленных для различных референц–эллипсоидов, не совпадают. Поэтому при решении задач судовождения переход с карты, составленной по материалам одного государства, на карту, составленную по данным другого государства, следует осуществлять не по координатам, а по пеленгу и расстоянию относительно нанесенного на карты ориентира.
За модель геоида может быть принята и более простая геометрическая фигура–сфера (шар). Погрешности перехода от геоида к шару могут считаться пренебрежимо малыми при решении ряда задач судовождения:
- при измерении расстояния в морских милях;
- при аналитическом счислении в экваториальной зоне;
- при расчете плавания по кратчайшему пути и др.
Тема 1.2 Система координат. Разность широт и разность долгот.
1.2.1 Основные точки, линии и круги Земли.
Земля вращается вокруг своей оси с запада на восток.
Эта ось пересекается с поверхностью Земли в двух точках РN и РS, называемых географическими полюсами. Точку РN называют Северным, или нордовым, полюсом N, а точку РS – Южным, или зюйдовым, S. Если рассечь земной шар плоскостью, проходящей через его центр (QQ1), то в сечении получится большой круг. Если же рассечь шар плоскостью, не проходящей через его центр (aa1), то в сечении получится малый круг. Окружность большого круга, плоскость которого перпендикулярна оси Земли, называется экватором (QQ1). Экватор делит земной шар на два полушария: Северное и Южное. Окружности малых кругов, плоскости которых параллельны плоскости экватора, называются параллелями (aa1). Окружности больших кругов, плоскости которых проходят через земные полюса, называются географическими, или истинными, меридианами.
Через любую точку на земном шаре можно провести меридиан, называемый меридианом места. Меридиан, который проходит через астрономическую обсерваторию в г. Гринвиче (Великобритания) (Р NАР S), называется нулевым, или гринвичским меридианом. Этот меридиан делит вместе с противоположным ему меридианом (Р NА1Р S) земной шар на два полушария: Восточное и Западное. Если стать на гринвичском меридиане лицом к Р N, то вправо от наблюдателя будет Восточное полушарие, а влево – Западное.
1.2.2 Понятие географической широты и долготы.
Положение любой точки на земной поверхности определяется ее координатами – географической широтой и географической долготой.
Возьмем на земной поверхности точку М и проведем через нее меридиан и параллель. Соединим точку М с центром Земли (точка О). Линия ОМ является радиусом Земли и отвесной линией наблюдателя в точке М.
Географической широтой φ точки называется угол (МОВ), заключенный между отвесной линией данной точки и плоскостью экватора. Широта измеряется дугой меридиана от экватора до параллели точки (ВМ). Счет широт ведется от экватора к северу и югу от 0° до 90°. Северная широта обозначается буквой N (норд) и считается положительной (+), южная – буквой S (зюйд) и считается отрицательной (-). Широта определяет параллели данной точки.
Географической долготой λ точки называется угол (АОВ), заключенный между плоскостью гринвичского меридиана и плоскостью меридиана данной точки. Долгота измеряется меньшей из дуг экватора между гринвичским меридианом и меридианом данной точки (АВ). Счет долгот ведется от гринвичского меридиана к востоку и западу от 0° до 180°. Восточная долгота обозначается буквой Е (ост) и считается положительной (+), западная – буквой W (вест) и считается отрицательной (-). Долгота определяет положение меридиана данной точки.
1.2.3 Другие системы координат точек, применяемые в судовождении.
Существует несколько систем координат для определения положения точки на земной поверхности, применяемые в судовождении: географическая, прямоугольная и геоцентрическая. Рассмотренная выше система называется географической.
Прямоугольная система координат определяет положение точки А на земной поверхности координатами А (x; y; z). За начало координат принимается центр Земли. Ось OZ совпадает с осью O Р N, ось OX в плоскости экватора и начального меридиана, а ось OY в плоскости экватора и перпендикулярна плоскости начального меридиана. Эта система применяется при теоретических выводах.
Геоцентрическая система координат относится к эллипсоиду и применяется в задачах, связанных с построением некоторых картографических проекций. Положение точки в этой системе определяется двумя координатами – геоцентрической широтой и географической долготой. Геоцентрической широтой называется угол между плоскостью экватора и прямой, соединяющую данную точку с центром земного эллипсоида. Разность между географической и геоцентрической широтами называется редукцией широты.
= , где - полярное сжатие, - географическая широта.
1.2.4 Определение разности широт и разности долгот.
Координаты судна во время плавания непрерывно меняются. Изменение широт и долгот судна называются разностями широт и долгот.
Разность широт (РШ) двух точек на земной поверхности измеряется дугой меридиана, заключенной между параллелями этих точек. Если широты пунктов отхода и прихода судна одноименные, т. е. обе широты - N или S, то РШ численно равна разности большей и меньшей широт этих точек (В и А на рис.). Если же пункты отхода и прихода расположены в разных полушариях, т. е. их широты разноименные, то РШ численно равна сумме широт двух точек (С и D на рис.).
Наибольшее значение РШ 180°, что соответствует перемещению судна с одного полюса в другой. Если судно перемещалось по какой-либо одной параллели, то РШ равна 0°. Вычисленной РШ приписывается наименование «к N» (+) или «к S» (-) в зависимости от того, в каком направлении перемещалось судно.
Разность долгот РД двух точек на земной поверхности измеряется меньшей из дуг экватора, заключенных между меридианами этих точек. Если долготы пунктов отхода и прихода одноименные, т. е. обе Е или W, то РД численно равна разности большей и меньшей долгот этих точек (В к А на рис.).
Если же пункты отхода и прихода расположены в различных полушариях, т. е. долготы разноименные, то РД численно равна сумме долгот этих точек (С и D на рис.). Так как за РД принимается всегда меньшая из дуг экватора, то ее значение не может превышать 180°. Если при сложении разноименных долгот получено значение, большее 180°, то за РД принимается дополнение до 360°. Такой случай может возникнуть при пересечении судном меридиана 180°. Вычисленному значению РД также приписывается наименование «к Е» (+) или «к W» (-) в зависимости от того, в каком направлении перемещалось судно.
Если северной широте и восточной долготе условно приписать знак «+», а южной широте и западной долготе — знак «-», то значения РШ и РД можно вычислить по следующим алгебраическим формулам:
РШ = φ2 – φ1;
РД = λ 2 - λ 1 ;
где φ2, λ 2 и φ1, λ 1 соответственно координаты конечной и начальной точек плавания.
Знак результата, полученного при вычислении по формулам, покажет наименования РШ и РД. Если при вычислении РД берется дополнение до 360°, то наименование РД изменяется.
Пример 1. Судно вышло из пункта А с координатами φ1 = 12°15'N и λ 1 = 55°42,5'W и пришло в пункт В с координатами φ2 = 8°26,5'S и λ 2 = 22°07' W. Определить РШ и РД. Решение:
φ2 = 8°26,5' λ 2 = 22°07'
- -
φ1 = 12°15' λ 1 = 55°42,5'
_____________________________________________________________
РШ = - 20°41,5' = 20°41,5'к S РД = + 33°35,5' = 33°35,5' к Е
Тема 1.3 Морские единицы длины и скорости.
В навигации удобно использовать такую единицу длины, которая позволила бы выражать расстояние одним и тем же числом, как в линейной, так и в угловой мере, поэтому в качестве основной единицы длины для измерения расстояний в море принята морская миля, равная одной длине минуты дуги географического меридиана (земля принята за шар).
Однако длина одной минуты меридиана на земном эллипсоиде (эллипсоиде Красовского) является величиной переменной, зависящей от широты. С достаточной точностью ее можно получить по формуле:
1' = 1852,25 - 9.31Соs2φ, где φ – широта места судна в градусах
на полюсах 1' = 1861.6 м – мах
на экваторе 1' = 1842.9 м – мin
на φ = 45 градусам 1' = 1852.2 м
Пользование на практике переменной по величине единицей длины неудобно. Поэтому за морскую милю принимают величину постоянную.
В 1929 г. Международное географическое бюро в качестве международной морской мили приняло округленное значение ее средней величины, равное 1852 м. К этому решению присоединилось большинство стран, в том числе и СССР (в 1932 г.).
Полагая, 1' = 1852 м, мы по существу заменяем земной эллипсоид шаром, имеющим радиус
R = = 6366707 м.
Следовательно, международная, стандартная морская миля – это длина одной минуты дуги меридиана земного шара, радиус которого равен 6366707 м.
Некоторые страны не присоединились к решению Международного гидрографического бюро. Так в Англии и Японии принята 1' = 6080 фут = 1853.18 м. В Италии, Дании, Нидерландах I’ = 1851.85 м, в Португалии 1' = 1850.0 м, в Англии и США 1 сухопутная уставная миля = 1609,344 м.
Одна десятая часть морской мили называется морским кабельтовым.
1 кбт = 185.2 м.
При артиллерийских и торпедных стрельбах применяется артиллерийский кабельтов 1 арт.кбт = 182,88 м .
В иностранных флотах применяются следующие единицы длины:
Дюйм – ½ фута - 2.54 см
1 фут = 30,48 см (1 м = 3,281 фута) – для обозначения высот ориентиров на берегу и малых глубин на английских морских картах.
1 морская сажень = 1.83 м 6 футов (1 м = 0,547 морских саженей ) – для обозначения глубин на английских морских картах.
1 статутная (береговая) миля = 1609,4 м – для измерения расстояний на суше (Англия и США).
1 ярд = 91.44 см = 3 футам – для измерения небольших расстояний в Англии.
Соотношения между различными единицами длины даны в таблице 5.6 МТ –2000.
В качестве единицы скорости в навигации принимают узел.
1 узел =
Так в качестве основной единицы длины в навигации принята морская миля, то скорость судна выражается числом миль, пройденных в час.
Под воздействием собственных двигателей судно перемещается относительно воды со скоростью Vо, которая называется относительной скоростью.
Под воздействием течения судно вместе с массой воды перемещается относительно земной поверхности со скоростью - Vт. Скорость перемещения судна под воздействием течения называется переносной скоростью.
Под суммарным воздействием двигателей, течения и ветра судно перемещается относительно земной поверхности со скоростью V, которая называется путевой скоростью.
Тема 1.4 Основные линии и плоскости наблюдателя.
Счет направлений в море. Истинные курсы и пеленги. Курсовые углы.
Для ориентирования в море принята система условных плоскостей и линий наблюдателя.
На рисунке показана земля , Pn Ps – земная ось, в точке А находиться наблюдатель на широте φ. Линия АО – отвесная линия.
Вертикальная плоскость, проходящая через место наблюдателя и земную ось, называется плоскостью истинного меридиананаблюдателя.
Плоскость, перпендикулярная отвесной линии и проходящая через точку А наблюдателя, называется плоскостью истинного горизонта наблюдателя.
Плоскости истинного горизонта и меридиана наблюдателя пересекаются по линии NS называемой линией истинного меридиана. Ее направление в любой точке Земли
указывает на северный и южный полюсы.
Вертикальная плоскость, перпендикулярная плоскости истинного меридиана, называется плоскость первого вертикала, а ее пересечение с плоскостью истинного горизонта дает направление EW. Линии NS и EW делят плоскость истинного горизонта на 4 четверти NE, NW, SE, SW. Все направления в плоскости истинного горизонта принято определять по отношению к линии истинного меридиана NS.
Еще в древние времена каждая четверть горизонта делилась на восемь частей, а следовательно, весь горизонт – на 32 части. Эти 32 направления получили название румбов, каждый из которых составляет 360º/ 32 = 11,25º градуса.
В судовождении используются различные системы счета направлений: румбовая, круговая, полукруговая и четвертная.
В румбовой системе весь горизонт делится на Румбы, отсчитывают от N или S в сторону Е или W от 0º до 8º . Румбы N,E,S,W называют главными, румбы NE,SE,NW,SW – четвертными, остальные 24 – промежуточные румбы. Эта система счета применяется для указаний направлений ветра, волнения и течения. В МТ-2000 в таблице помещены названия румбов и их градусные выражения( смотрите рисунок ).
В круговой системе весь горизонт делят на 360º градусов, счет направлений ведется от нордовой части истинного меридиана по часовой стрелке от 0ºдо 360º градусов.
В полукруговой системе счет направлений ведется от нордовой или зюйдовой части истинного меридиана в сторону E или W от 0ºдо 180º градусов. Направления обозначаются величиной угла в градусах и наименованием (от какой части истинного меридиана и в какую сторону отсчитано данное направление);например N120º W, S 130ºE.
В четвертной системе счет направлений ведется от нордовой или зюйдовой части истинного меридиана в сторону Е или W от 0ºдо 90º градусов.
Например S NW28º, NE 38º, SW76º, SE52º.
Перевод направлений из одной системы счета в другую производится логически на основании рисунка. Например: 150º = SE 30º = S 30º E = N 150º E.
Направления на поверхности Земли определяют путем измерения горизонтальных углов между плоскостью истинного меридиана наблюдателя и вертикальной плоскостью, проведенной через тот или иной ориентир. В судовождении в основном приходится иметь дело с направлением движения судна и направлением на какой-либо ориентир.
Истинный курс (ИК) – угол в плоскости истинного горизонта между северной частью истинного меридиана (Nи) и носовой частью продольной оси судна. Отсчитывается в круговой системе счёта от 0º до 360º (по часовой стрелке).
Истинный пеленг (ИП) – угол в плоскости истинного горизонта между северной частью истинного меридиана (Nи) и направлением на объект. Отсчитывается в круговой системе счёта от 0º до 360º (по часовой стрелке).
Направление, отличающееся на 180º от истинного пеленга, называется обратным истинным пеленгом (ОИП). ОИП=ИП 180º.
Курсовой угол (КУ) - угол в плоскости истинного горизонта между носовой частью продольной оси судна и направлением на ориентир. Отсчитывается в полукруговой системе счёта от 0º до 180º правого и левого бортов. КУ правого борта имеет знак (+), левого борта знак (-).
Из рисунка видно, что между ИП, ИК, и КУ имеются следующие соотношения:
ИП = ИК + (-КУ) ИК = ИП – (-КУ) КУ = ИП - ИК
В формулах алгебраически, необходимо учитывать знак КУ. Если при расчёте ИП или ИК, получается со знаком (-), то берётся их дополнение до 360º.
КУ = 90º любого борта называется траверзом. Направление, перпендикулярное ДП судна называется траверзным направлением.
В судовождении также используют термины «линия курса» и «линия курса».
Линия курса – это след от пересечения диаметральной плоскости судна с плоскостью истинного горизонта.
Линия пеленга - след от пересечения плоскости истинного горизонта с вертикальной плоскостью, проходящей через судно и ориентир.
Тема № 1.5 Дальность видимости навигационных ориентиров
Дата: 2019-02-19, просмотров: 427.