Устройства автоматической подстройки частоты (АПЧ) служат для стабилизации и управления частотой автогенератора по эталонному сигналу.
Разнообразно применение систем АПЧ в радиоприемных и радиопередающих устройствах. Назовем несколько наиболее типичных случаев их использования:
– в синтезаторах частоты для создания дискретного множества частот при одном эталонном сигнале;
– для стабилизации частоты мощных автогенераторов по слабому сигналу эталонного автогенератора, что позволяет существенно сократить число ВЧ или СВЧ усилительных каскадов;
– для автоматической подстройки частоты гетеродина радиоприемника по частоте принимаемого сигнала.
Обобщенная структурная схема устройства АПЧ приведена на рис. 2. В устройстве сравниваются сигналы эталонного и стабилизируемого автогенераторов, в результате чего вырабатывается сигнал ошибки. После фильтрации этот сигнал управляет стабилизируемым автогенератором, частота которого по установленному алгоритму следит за частотой эталонного автогенератора. В устройство АПЧ входят также преобразователи частоты формируемого сигнала и устройство поиска, осуществляющее ввод всего устройства в режим автоматического регулирования.
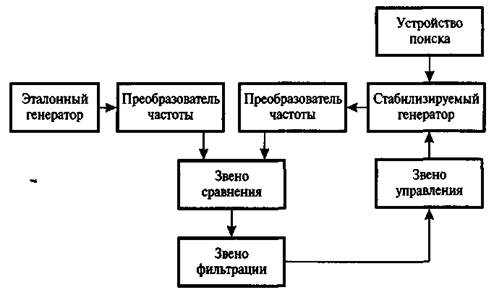
Рис. 2 – Структурная схема устройства ЧАП непрерывного типа
Классификация
1) В зависимости от способа получения сигнала ошибки различают:
- устройства частотной автоподстройки частоты (ЧАПЧ),
- фазовой автоподстройки частоты (ФАПЧ);
- комбинированные (ЧАПЧ - ФАПЧ).
В устройствах ЧАПЧ сигнал ошибки вырабатывается путем сравнения частот сигналов эталонного и стабилизируемого автогенераторов, в устройствах ФАПЧ - путем сравнения фаз тех же сигналов.
2) По виду сигнала в цепи управления устройства АПЧ подразделяют на:
- непрерывные при аналоговом сигнале;
- дискретные.
3) Дискретные устройства АПЧ, в свою очередь, в зависимости от метода квантования сигнала подразделяют на:
- релейные (при квантовании по уровню),
- импульсные (при квантовании по времени);
- цифровые (при квантовании по уровню и времени).
Основные звенья. Рассмотрим основные звенья, входящие в устройства АПЧ. В качестве эталонного генератора в ней обычно используется высокостабильный кварцевый автогенератор или принимаемый радиосигнал, а в качестве стабилизируемого генератора – автогенератор с параметрической стабилизацией частоты. В качестве звена фильтрации применяется фильтр нижних частот 1, 2-го или более высокого порядка. Преобразователи частоты, включаемые после автогенераторов, могут выполнять такие функции, как умножение, деление или смещение частоты сигнала. Звеном сравнения в ЧАПЧ является частотный дискриминатор, напряжение на выходе которого U д зависит от разности частот входных сигналов - стабилизируемого (f ст) и эталонного (f эт):
 .
.
Пример характеристики частотного дискриминатора, начальный участок которой является линейным с крутизной S д, приведен на рис. 3, а.

Рис. 3 – Характеристики частотного дискриминатора
Звеном сравнения в ФАПЧ является фазовый дискриминатор, напряжение на выходе которого Ucp зависит от разности фаз сигналов эталонного и стабилизируемого автогенераторов: Ucp = y ( j ст – j эт ).
Звеном управления обычно является управляющий элемент с варикапом или ферритом. Назначение данного элемента состоит в управлении частотой стабилизируемого автогенератора в зависимости от величины напряжения на его входе.Поэтому данное звено определяется зависимостью D f = y ( U у ), пример которой приведен на рис. 3, б. Начальный участок данной характеристики обычно является линейным с крутизной Sy.
Системы АПЧ являются нелинейными устройствами, поскольку в них одно или несколько звеньев являются нелинейными. При линеаризации таких звеньев исследование АПЧ проводится в рамках линейной модели, что позволяет получить некоторые важные результаты.
К параметрам устройства АПЧ, являющимися показателями качества процесса регулирования, характеризующими работу устройств АПЧ, относятся:
1) Точность определяется отклонением частоты стабилизируемого автогенератора от номинального значения в установившемся режиме. При действии на устройство помимо полезного сигнала и помехи точность определяется средней и среднеквадратической ошибкой.
2) Коэффициент авторегулированияКрег – отношение первоначальной ошибки по частоте автогенератора в момент его включения к ошибке в установившемся режиме работы. Пусть ошибка частоты автогенератора (ее отклонение от номинального значения) равна 1 МГц, а после окончания процесса регулирования она снижается до 100 Гц. Для коэффициента регулирования получим: Крег=106/100=104.
3) Полоса схватывания – максимально допустимая величина первоначальной ошибки по частоте автогенератора, при которой устройство нормально функционирует после его включения.
4) Полоса удержания – максимально допустимая величина собственной ошибки по частоте автогенератора в установившемся режиме работы. Как правило, полоса удержания больше полосы схватывания.
5) Переходный процесс установления частоты стабилизируемого автогенератора после включения устройства АПЧ или изменения частоты эталонного генератора. Обычно этот процесс носит апериодический или затухающий колебательный характер. Время установления частоты стабилизируемого автогенератора – время переходного процесса, за которое частота входит в определенную зону.
6) Устойчивость работы устройства АПЧ определяется несколькими параметрами. Поскольку устройство АПЧ является схемой с обратной связью, то в ней подобно автогенератору могут возникнуть собственные автоколебания, если будут выполнены условия баланса амплитуд и фаз. Такой режим работы является недопустимым в устройстве АПЧ, которое должно отслеживать изменения частоты входных сигналов, а не создавать собственные автоколебания. Более того, следует иметь определенный запас по устойчивости.
Дата: 2019-02-25, просмотров: 357.