Требования к системам управления
Главным требованием к источнику управляющих сигналов является обеспечение правильной работы тиристоров в силовых блоках аппаратов. Это требование можно сформулировать следующим образом: надежность тиристора обеспечивается, если выходные параметры источника управления соответствуют области токов и напряжений диаграммы его управления, называемой областью гарантированного включения.
Выбор конкретных значений токов и напряжений прибора и, следовательно, требования к выходным параметрам источника управления зависят от того, в каких режимах работы и в какой схеме предполагается использовать тиристор.
Например, неодинаковые требования предъявляются к управляющим сигналам, с помощью которых обеспечивается включение основного тиристора VS 1 и коммутирующего VS 2 в аппарате постоянного тока. Если нагрузка активно-индуктивная, а ток и напряжение коммутируемой цепи не являются предельными для тиристора VS 1, включение его можно осуществлять сигналом небольшой мощности, т.е. с параметрами тока и напряжения, которые соответствуют длительному управлению. Никаких других требований, в том числе к скорости нарастания IGT, не предъявляется; для управления тиристором VS 2, который работает в режиме многократной перегрузки по току и, как правило, при предельных значениях по скорости нарастания анодного тока, требования к управляющему току (напряжению) повышаются.
Во-первых, длительность его не должна превышать длительность коммутационного процесса, заканчивающегося перезарядкой конденсатора. Во-вторых, для повышения стойкости тиристора необходимо обеспечивать его включение импульсом тока с большой амплитудой и с крутым фронтом.
Еще более высокие требования к источникам управляющих сигналов предъявляются при групповом (параллельном, последовательном или смешанном) соединении тиристоров в силовых блоках. В этом случае возникают проблемы не только с формированием импульсов тока (напряжения) с определенными параметрами, но и с гальваническим разделением силовой и управляющей цепей, синхронизацией поступления сформированных импульсов с заданными моментами времени.
В результате значительно усложняется и реализующая перечисленные функции схема, которую в дальнейшем будем называть системой управления (СУ).
К настоящему времени разработаны и находят применение весьма разнообразные по исполнению и принципу действия СУ, что объясняется широкой номенклатурой электронных аппаратов, а также большим числом различных приборов и устройств автоматики, на основе которых возможно построение системы управления.
Тем не менее, все существующие системы управления тиристорами и тиристорными аппаратами можно разделить на следующие виды:
1. Электронные, выполненные на базе транзисторов, динисторов, маломощных и мощных тиристоров, интегральных микросхем, микропроцессоров.
2. Электромагнитные, построенные на основе магнитных усилителей, пик-трансформаторов, насыщающихся дросселей, трансформаторов тока, трансформаторов напряжения и др.
3. Комбинированные, включающие в себя элементы первых двух групп в различных сочетаниях.
В зависимости от назначения аппарата и схемы силового тиристорного блока СУ может быть очень простой, как, например, в контакторе переменного тока низкого напряжения, или очень сложной, если она предназначена для управления тиристорным аппаратом переменного тока высокого напряжения. Различны и требования, которым СУ должны удовлетворять.
Однако уже из отмеченного выше следует, что ряд требований являются общими для всех СУ. Они должны обеспечивать:
• генерирование управляющих импульсов с оптимальными для заданного режима работы тиристоров амплитудой, длительностью и крутизной фронта;
• стабильность параметров формируемых импульсов во времени и при изменении температурных режимов;
• синхронизацию выдачи импульсов на управляющие электроды тиристоров с фазой тока нагрузки или с фазой напряжения питания;
• высокое быстродействие и готовность к работе.
Кроме того, СУ должны быть помехоустойчивы, иметь по возможности малые массу и габариты, потреблять небольшое количество энергии.
В большинстве практических случаев управление тиристорами осуществляется импульсными системами управления. Реализуемые при этом преимущества значительны, но одновременно появляются и сложности в выборе оптимальных параметров импульсов тока, и прежде всего в выборе достаточной их длительности.
При большой индуктивности в коммутируемой цепи процесс нарастания тока сильно затягивается, и это требует поддержания управляющего сигнала в течение времени, значительно превышающего собственное время включения тиристора. При недостаточной длительности управляющего сигнала анодный ток тиристора не успевает достичь значения тока надежного включения и тиристор снова выключается. Особую опасность режим ненадежного включения представляет, если тиристоры в силовом блоке аппарата соединены параллельно или последовательно. В этом случае невключение одного или нескольких из параллельно соединенных приборов приводит к перегрузкам по току включившихся тиристоров. При последовательной работе тиристоры, не успевшие полностью включиться, подвергаются воздействию многократных перенапряжений.
Второй фактор, влияющий на выбор длительности управляющего импульса, также связан с индуктивностью нагрузки, которая определяет разность фаз напряжения и тока в установившемся режиме работы.
Если выдачу управляющих сигналов на входы тиристоров синхронизировать с переходом напряжения источника питания через нуль, то длительность управляющего импульса должна быть увеличена на величину, определяемую возможным углом сдвига фаз. Если учесть, что коммутирующие аппараты должны надежно работать при изменении угла в широких пределах (cos φ ≈ 0,2…0,9), синхронизация по напряжению, по существу, приводит к использованию для управления тиристорами импульсов большой длительности. Поэтому при нестационарной активно-индуктивной нагрузке необходимо стремиться к осуществлению синхронизации управляющих импульсов с кривой тока в нагрузке.
Импульсное управление
Устойчивое включенное состояние тиристорных аппаратов переменного тока обеспечивается за счет периодически поступающих на входы (управляющие электроды) тиристоров управляющих импульсов.
При встречно-параллельном соединении тиристоров в силовом блоке общее число формируемых СУ управляющих импульсов должно быть равно числу тиристоров в блоке, причем половина из них вырабатывается со сдвигом на угол π по отношению к другим.
Если аппарат предназначен только для выполнения функции коммутирования цепей, начала импульсов должны быть синхронизированы с моментами перехода тока нагрузки через нулевые значения, как показано на рис. 109, который иллюстрирует процесс работы одного модуля аппарата, содержащего два встречно-параллельно соединенных тиристора. Формирование управляющих импульсов можно синхронизировать с моментами перехода через нулевые значения напряжения.
| |
| Рис. 109. Диаграмма работы тиристорного аппарата |
Но в этом случае из-за увеличения длительности импульсов возникают трудности передачи их через разделительные трансформаторы и увеличивается мощность формирователей.
Если аппарат кроме коммутационных операций должен выполнять и функции регулирования проходной мощности (фазовое управление), СУ должна обеспечивать сдвиг (задержку) управляющих импульсов относительно нуля тока на заданный угол α. Простые схемы, обеспечивающие регулирование α, приемлемы, когда тиристоры работают индивидуально. В общем случае формирование, синхронизация и распределение управляющих импульсов по тиристорам осуществляются автономными от силовых цепей системами управления.
В зависимости от принципа формирования и распределения импульсы СУ подразделяются на одно- и многоканальные, а в зависимости от принципа регулирования фазы (угла задержки α) – на горизонтальные, вертикальные, цифровые.
При горизонтальном управлении формирование управляющих импульсов осуществляется в моменты перехода синусоидального напряжения через нулевые значения. Изменение фазы импульсов обеспечивается регулированием фазы напряжения и, следовательно, смещением нулевых значений напряжения по оси времени (по горизонтали). Для практической реализации этого метода в составе СУ должен быть генератор напряжения, который вырабатывает синусоидальное напряжение с той же частотой, что и напряжение, прикладываемое к тиристору, или ток, протекающий через него.
Наиболее простой является СУ, в которой в качестве генератора напряжения используется трансформатор тока или трансформатор напряжения, включенный соответственно последовательно или параллельно с тиристором, которым надо управлять.
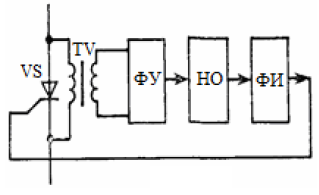
На рис. 110 приведена структурная схема СУ, реализующая горизонтальный метод управления тиристором VS. Генератором синусоидального напряжения в ней является трансформатор напряжения ТV.
Снимаемое со вторичной обмотки трансформатора напряжение, синхронизированное с напряжением на тиристоре, подается на фазосдвигающее устройство (ФУ), например на мостовой фазовращатель.
С выхода ФУ напряжение U ФУ, смещенное на угол относительно напряжения UTV, поступает в устройство, фиксирующее переход напряжения через нулевые значения – нуль-орган (НО). Импульсами напряжения, появляющимися на выходе НО, запускается формирователь управляющих импульсов (ФИ). В результате на вход тиристора VS подается управляющий импульс напряжения UG, задержанный относительно начала положительного полупериода анодного напряжения на угол a = φ.
| |
| а) | б) |
| Рис. 110. Структурная схема системы управления (а) и диаграмма, поясняющая ее работу (б) | |
При вертикальном методе управления формирование управляющего импульса осуществляется в момент равенства по абсолютной величине двух напряжений, одно из которых постоянное, а другое переменное (синусоидальное, треугольное или пилообразное). Постоянное стабилизированное напряжение, называемое напряжением управления, должно быть регулируемым, а переменное напряжение должно быть синхронизировано с напряжением на тиристоре, для которого формируется управляющий импульс.
Один из возможных вариантов исполнения СУ с использованием вертикального метода управления силовым блоком с встречнопараллельным соединением тиристоров приведен на рис. 111.
Напряжение с тиристорного блока подается на СУ через сетевой фильтр (Ф), сглаживающий импульсные помехи в напряжении сети.
С помощью пороговых элементов (ПЭ) синусоидальное напряжение преобразуется в прямоугольные импульсы с взаимным сдвигом по фазе на угол 180° и паузой δ ≈ 3…5° между окончанием одного импульса и началом следующего, которая обусловлена порогом срабатывания ПЭ1 и ПЭ2.
| |
| Рис. 111. Структурная схема одноканальной системы управления, реализующая принцип вертикального управления |
В результате такого сдвига на входе логического элемента Э1 имеет место совпадение сигналов (логических нулей) в течение времени t = δ/ω. На выходе Э1, следовательно, формируются короткие импульсы, фиксирующие начало и конец каждого полупериода синусоидального напряжения. Эти импульсы используются для запуска генератора пилообразного напряжения (ГПН). На входе нуль-органа (НО) вырабатываемое ГПН напряжение сравнивается с напряжением управления Uy.
С момента времени, когда эти напряжения становятся равными и их разность меняет знак, на выходе HO формируется прямоугольный импульс напряжения НО U (рис. 112), который подается одновременно на входы логических элементов Э2 и Э3.
На другие входы этих элементов поступают импульсы напряжения с выходов пороговых элементов ПЭ1 и ПЭ2. Срабатывание логических элементов Э2 в Э3 происходит в момент времени, начиная с которого напряжение, соответствующее логической единице, подается на оба их входа.
Поскольку импульсы напряжения на выходах пороговых элементов ПЭ1 и ПЭ2 смещены во времени на величину длительности полупериода сетевого напряжения (10 мс при частоте f 50 Гц), каждый из логических элементов Э2 и Э3 срабатывает поочередно с частотой f. В результате обеспечивается и поочередный запуск формирователей управляющих импульсов ФИ1 и ФИ2. Задержка включения тиристоров на заданный угол α осуществляется регулированием напряжения управления (по вертикали), что приводит к смещению импульса напряжения на выход нуль-органа UНО (рис. 112) и, следовательно, на выходе логических элементов Э2 и Э3.
| |
| Рис. 112. К пояснению вертикального метода фазового управления |
По структуре исполнения СУ разделяются на одноканальные и многоканальные.
В одноканальных СУ все операции, связанные с синхронизацией и смещением по фазе управляющих импульсов, формируемых для всех тиристорных ветвей многоканального аппарата, реализуются в одном общем канале. Этим обеспечивается высокая фазовая симметрия управляющих импульсов и уменьшение аппаратурных затрат.
Однако для распределения импульсов по тиристорам необходимы дополнительные устройства (регистры сдвига, кольцевые пересчетные схемы), что приводит к усложнению системы управления и ограничению ее применения.
Многоканальные системы управления объединяют в себе идентичные по исполнению каналы, каждый из которых содержит генератор развертки, синхронизированный с сетью, фазосмещающее устройство, пороговое устройство и формирователь. Например, для создания систем управления трехполюсным аппаратом со встречно-параллельным соединением тиристоров требуются три идентичных канала, выполненные по схеме на рис. 111. Достоинством этих СУ является простота структурной схемы. Но они требуют подстройки каналов с целью их симметрирования.
В трехполюсных аппаратах, предназначенных для коммутирования и защиты электрических цепей, регулирования проходной мощности, СУ выполняют более сложные функции и имеют соответственно намного более сложную структурную схему, чем описанные выше. В частности, они могут содержать в себе дополнительно блок анализа сигналов, поступающих от датчика тока напряжения, блок анализа состояния тиристоров в полюсах, блок управления тиристорами узла принудительной коммутации и др. Очевидно, что в этом случае СУ, построенная на основе аналоговых интегральных микросхем общего назначения, становится очень сложной и надежность ее снижается. Одним из способов повышения надежности СУ является применение специальных микросхем, реализующих функции одного канала или даже нескольких каналов.
Перспективным направлением создания универсальных СУ является использование цифровых интегральных микросхем. Это предполагает переход от оперирования с аналоговыми сигналами (изменяющимися по закону непрерывной функции) к оперированию сигналами, изменяющимися по закону дискретной функции.
Основой цифровой СУ является микропроцессор (МП), представляющий собой программно-управляемое устройство, которое осуществляет процесс обработки цифровой информации и управление им. В зависимости от выполняемых СУ функций микропроцессор строится на одной или нескольких больших интегральных микросхемах (БИС), для которых характерна очень высокая степень интеграции. В одной БИС содержится несколько тысяч или даже десятки тысяч различных элементов.
Для осуществления связи микропроцессора с датчиками тока и напряжения, формирователями управляющих импульсов, исполнительными органами защиты необходимы устройства сопряжения (устройства ввода/вывода). В данном случае такими устройствами являются аналого-цифровые (АЦП) и цифро-аналоговые (ЦАП) преобразователи.
С помощью АЦП аналоговые электрические сигналы преобразуются в цифровые данные (коды), которыми оперирует микропроцессор. Вырабатываемые им команды в цифровых кодах преобразуются в аналоговые сигналы с помощью ЦАП и после этого поступают на исполнительные элементы.
Совокупность микропроцессора, средств сопряжения и программного обеспечения называется микропроцессорной системой.
Программное обеспечение – это последовательность команд, которые хранятся в запоминающем устройстве и реализуют требуемую последовательность операций.
В упрощенном виде структурная схема СУ на основе микропроцессора приведена на рис. 113. Микропроцессор в ней представлен четырьмя блоками: регистром команд (РК), устройством управления (УУ), арифметически-логическим устройством (АЛУ) и запоминающим устройством (ЗУ).
| |
| Рис. 113. Структурная схема микропроцессорной системы управления |
Связь МП с силовым тиристорным блоком (СТБ) и формирователем управляющих импульсов (ФУИ) осуществляется через АЦП (ввод данных) и ЦАП (выдача команд).
Дата: 2019-02-25, просмотров: 410.