Телемеханика — область науки и техники, предметом которой
является разработка методов и технических средств передачи и
приема информации (сигналов) с целью управления и контроля на
расстоянии. Специфическими особенностями телемеханики являют-
ся: 1) удаленность объектов контроля и управления; 2) необходимость
высокой точности передачи измеряемых величин; 3) недопустимость
большого запаздывания сигналов; 4) высокая надежность передачи
команд управления; 5) высокая степень автоматизации процессов
сбора информации. Телемеханизация применяется тогда, когда не-
обходимо объединить разобщенные или территориально рассредото-
ченные объекты управления в единый производственный комплекс
(например, при управлении газо- и нефтепроводом) либо когда при-
сутствие человека на объекте управления нежелательно (например, в
атомной промышленности, на химических предприятиях) или невоз-
можно (например, при управлении непилотируемой ракетой).
Особое значение телемеханика приобретает в связи с созданием
автоматизированных систем управления (АСУ). Обработка данных,
полученных по каналам телемеханики, на ЭВМ позволяет значитель-
но улучшить контроль за технологическим процессом и упростить
управление. Поэтому в настоящее время понятия «телемеханика» и
АСУ ТП становятся синонимами. Разница между этими понятиями
заключается не столько в технической сути, сколько в традициях ис-
пользования в определенной области промышленности. Например,
в трубопроводном транспорте предпочитают использовать слово
«телемеханика», на промышленных предприятиях — АСУ ТП. В ан-
глоязычных источниках аналогом понятия «телемеханика» является
сокращение SCADA — Supervisory Control And Data Acquisition —
диспетчерское управление и сбор данных, в которое вкладывается,
по сути, тот же смысл.
Пример построения двухуровневой телемеханической системы,
ставшей классической схемой, показан на рис. 11.1. Контроль и управ-
ление системой осуществляют с пункта управления (ПУ), где нахо-
дятся диспетчер, аппаратура телемеханики, ЭВМ, мнемонический
щит. Объекты контроля и управления находятся на одном или не-
скольких контролируемых пунктах (КП).
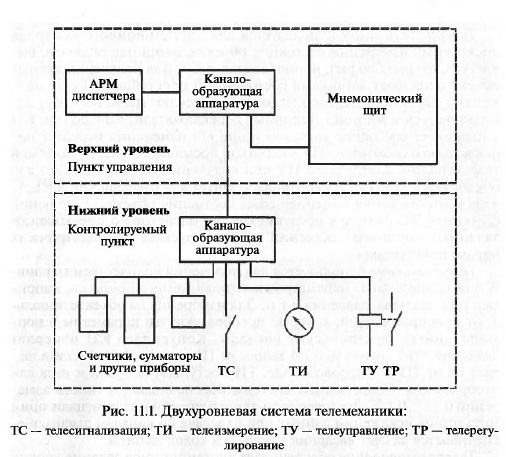
Базовыми функциями системы телемеханики являются телеуправ-
ление (ТУ), телеизмерение (ТИ), телесигнализация (ТС) и телерегу-
лирование (TP).
Телеуправление обеспечивает дистанционное управление объ-
ектом контроля. ТУ представляет собой воздействие на исполнитель-
ные органы контролируемых пунктов, имеющие дискретное состоя-
ние, путем подачи также дискретных команд. Команды ТУ обычно
двухпозиционные: включить — отключить. Управление начинается с
выдачи оператором (диспетчером) команды телеуправления с ЭВМ
или пульта управления. Команда ТУ передается с пункта управления
на контролируемый пункт по каналу связи. Контроллер КП, получив
команду ТУ, проверяет ее достоверность и выдает электрический
сигнал на исполнительное устройство (например, включает электро-
привод задвижки). Для контроля выполнения команды контроллер
КП передает на ПУ квитанцию ТУ. Применяются также более слож-
ные алгоритмы выдачи ТУ, например, с промежуточным контролем
готовности исполнительных цепей. Для защиты команд ТУ от ис-
кажений при передаче применяют специальное кодирование, напри-
мер передают команду дважды, в прямом и инверсном виде и т. п.
Обычно в одном цикле управляют только одним объектом.
Телесигнализация используется для дистанционного контроля
дискретных изменений состояния объекта, например включен/вы-
ключен, открыт/закрыт, норма/авария и т.п. Для получения данных
объект оснащают датчиками состояния. В простейшем случае при-
меняют двухпозиционные контактные переключатели, но могут ис-
пользоваться и многопозиционные переключатели. Контроллер КП
опрашивает состояние датчиков и при его изменении передает ин-
формацию о событии на ПУ в короткой посылке, обычно называемой
телесигналом. Контроллер ПУ при получении ТС передает Ьго для
обработки в ЭВМ (и на контроллер щита) для оповещения диспет-
чера и отображения изменившегося состояния объекта. Еще одной
функцией ТС является предупреждение оператора о превышении
заданных пороговых значений контролируемых технологических
параметров (уставок).
Телеизмерение используется для получения количественных зна-
чений непрерывных параметров контролируемого процесса, напри-
мер температуры, давления и т. п. Для измерения на объекте исполь-
зуют преобразователи, которые преобразуют эти параметры в нор-
мированные электрические сигналы. Контроллер КП измеряет
значения этих сигналов и по запросам ПУ или периодически пере-
дает их на ПУ в цифровом виде. ТИ поступают на ЭВМ и щит для
отображения. Современные системы обеспечивают точность изме-
рений 0,25... 0,1%. Достоверность телеизмерений и телесигнализации
(отсутствие искажений данных при передаче по каналам связи) обе-
спечивается за счет введения в посылки кодов защиты.
Телерегулирование обеспечивает дистанционное задание уровня
воздействия на объект управления. Оно представляет собой теле-
управление объектами с непрерывным множеством состояний. Для
реализации телерегулирования используются функции ТИ—ТУ или
ТС—ТУ. Управление начинается с задания оператором величины
воздействия, а затем выдачей команды с ЭВМ. Команда TP пере-
дается с пункта управления на контролируемый пункт по каналу
связи. Контроллер КП, получив команду TP, проверяет ее достовер-
ность и выдает сигнал заданного уровня на исполнительное устрой-
ство (например, открывает вентиль на 60 %). Кроме ручной при-
меняется автоматизированная выдача управления. В этом случае на
ЭВМ устанавливают программу с алгоритмом вычисления величины
управления. Для предотвращения «удара» при выдаче телерегулиро-
вания осуществляется плавное изменение выходного сигнала до
достижения заданного уровня. Эту задачу обычно выполняет кон-
троллер КП.
Пункт управления — это место размещения диспетчерского пер-
сонала, аппаратуры для приема и обработки информации от контро-
лируемых пунктов. Часто под термином ПУ подразумевают контрол-
леры, непосредственно выполняющие прием и первичную обработ-
ку данных от КП. В задачи ПУ входят: 1) прием данных с КП по
каналам связи; 2) организация опроса КП при подключении несколь-
ких КП на один канал связи; 3) передача на КП команд управления;
4) передача данных и прием команд ЭВМ; 5) переадресация, пере-
дача данных на верхний уровень и прием команд с верхнего уровня
в многоуровневых системах. Для реализации полного набора пере-
численных функций контроллеры ПУ оснащаются микропроцессо-
рами и соответствующим программным обеспечением. Перенастрой-
ка программного обеспечения позволяет гибко изменять конфигура-
цию системы, протоколы обмена и алгоритмы обработки данных в
процессе эксплуатации системы. Для настройки ПУ используются
специальные программы-конфигураторы. В современных ПУ про-
граммы и настройки хранят во внутренней FLASH-nамяти контрол-
леров, что обеспечивает быстрый запуск системы и восстановление
в случае сбоев.
Контролируемый пункт — это место размещения объектов кон-
троля и управления, а также аппаратура, выполняющая функции
контроля и управления, обычно называемая контроллером КП. Часто
под термином КП подразумевают один контроллер, установленный
на контролируемом объекте. Контроллер КП выполняет непосред-
ственный сбор данных с объекта (посредством опроса датчиков и
преобразователей) и передачу их на ПУ, реализуя функции телесиг-
нализации и телеизмерения, а также непосредственно выполняет
команды телеуправления. На крупных объектах (таких как нефтепе-
рекачивающие или компрессорные станции) могут находиться не-
сколько контроллеров КП. Для точной идентификации каждый из
них имеет свой логический номер, который называют номером или
адресом КП. В настоящее время практически все контроллеры КП
оснащены микропроцессорами и работают по заданной программе.
Программное обеспечение решает задачи сбора данных (фильтрует
дребезг контактов ТС и ослабляет сетевые наводки на цепи ТИ), вы-
полняет буферизацию событий перед выдачей в канал связи. Совре-
менные контроллеры КП вместе с базовыми функциями (ТС, ТИ,
ТУ) обеспечивают интеграцию в систему различных электронных
устройств: приборов учета энергии, автоматических защит и т. п. На-
пример, контроллеры КП снимают показания электронных счетчи-
ков, расходомеров и передают их для обработки на ПУ по единому
телемеханическому каналу связи. Для стыковки с такими устройства-
ми применяют один из локальных интерфейсов, например RS-485.
Информационный обмен идет с использованием одного из совме-
стимых протоколов, например Modbus.
Взаимодействие между ПУ и КП происходит по каналу связи.
Каналом связи называется совокупность технических средств и трак-
та для передачи сообщений на расстояние независимо от других
каналов. Он образуется в линии связи — проводной, радиолинии
и др. Линия связи — это физическая среда или тракт, по которым
происходит передача сигналов между КП и ПУ, например проводная
или кабельная линия, оптоволокно, выделенный телефонный канал,
радиоканал и т. п. Одна линия связи может быть использована для
образования многих каналов с независимой передачей сообщений.
Число каналов, размещаемых в одной линии связи, определяется ее
полосой пропускания, спектром сигналов и уровнем помех в линии.
При подключении к одному каналу связи нескольких КП каждый из
них должен иметь уникальный номер. Часто под ПУ и КП подразуме-
вают саму аппаратуру телемеханики. Данные между ПУ и КП пере-
дают короткими массивами, которые называют кадрами, фреймами,
посылками. Посылки вместе с данными содержат адресную часть и
проверочный код для выявления искажений в процессе передачи.
Адрес должен однозначно идентифицировать измеряемый параметр
в рамках всей системы, например номер контроллера ПУ — номер
КП — номер группы в КП — номер параметра в группе. Длк защиты
данных обычно используют один из вариантов подсчета контрольной
суммы.
Способ кодирования данных и порядок обмена посылками обыч-
но называют протоколом обмена. Одним из основных требований
при выборе протокола является его надежность, т.е. способность
передавать данные без искажений и возможность повторной пере-
дачи в случае сбоя.
Мнемонический щит представляет собой табло с пассивной схе-
мой контролируемого объекта и активными элементами, отображаю-
щими текущее состояние объекта. Мнемонический щит использует-
ся для наглядного отображения состояния крупных систем, содержа-
щих до нескольких тысяч объектов контроля. Например, эти щиты
широко используются для оборудования диспетчерских пунктов не-
фтеперекачивающих и компрессорных станций, резервуарных парков
и т. п. На лицевой стороне щита рисуют или выкладывают специ-
альными мозаичными элементами схему контролируемой системы.
Для отображения состояния объектов системы в щит вмонтированы
активные элементы — единичные лампы, светодиоды и цифровые
индикаторы. Ими управляет щитовой контроллер (один или не-
сколько).
Информация на щит может как поступать в автоматическом ре-
жиме (с ПУ комплекса телемеханики или АСУ ТП), так и вводиться
по командам ручного ввода от диспетчера системы (через ПЭВМ).
В основном на щит выводят информацию двух типов: телесигнали-
зацию и телеизмерение. Для отображения состояния ТС используют
лампы или светодиодные индикаторы. На больших щитах часто ис-
пользуется модель так называемого «темного щита»: индикатор на-
чинает мигать при изменении состояния ТС, остается гореть после
квитирования и гаснет после приведения щита в соответствие с из-
менившимся состоянием. Значение измеряемых параметров отобра-
жается на цифровых индикаторах, мозаичных или семисегментных.
Для увеличения наглядности отображаемой информации могут при-
меняться индикаторы разного цвета или с управляемым цветом
свечения, например зеленый — желтый — красный.
Автоматизированное рабочее место (АРМ) — это рабочее ме-
сто специалиста в какой-либо предметной области, оборудованное
компьютером и специальным программным обеспечением, помо-
гающее решать задачи в рамках деятельности этого специалиста
(например, АРМ диспетчера, АРМ технолога и т.п.). АРМ может
быть оснащено дополнительным нестандартным оборудованием,
например, АРМ телемеханика оснащают программатором микросхем
ПЗУ, отладочным комплектом и пр. Часто под термином АРМ по-
нимают исключительно программный продукт для автоматизации
труда специалиста.
В современных системах телемеханики большое внимание уде-
ляется их программному обеспечению и интеграции с действующи-
ми системами и программными комплексами. Стандартом стало
графическое представление схем контролируемого процесса (мне-
мосхем) с «живым» отображением текущего состояния, управление
объектом с кадров мнемосхем. В программном обеспечении наблю-
дается тенденция к стандартизации программных интерфейсов
систем сбора данных и обрабатывающих программ, обеспечению
возможности экспорта собранных данных в специализированные
программы (расчета режимов, планирования, аналитические, АРМ
специалистов). С технической стороны в системах все чаще исполь-
зуются современные скоростные каналы связи (оптоволокно,
Ethernet) и беспроводные технологии (например, транкинговая и
сотовая связь). К традиционным функциям телемеханики (телесиг-
нализация, телеизмерение, телеуправление) добавляются функции
различного учета, транспорта данных с локальных автоматических
приборов. К обычным функциям контроля за изменением состояния
и превышения предельных значений добавляются возможности
текущих расчетов и логического анализа (например, балансные рас-
четы).
Дата: 2018-12-28, просмотров: 768.