Измерение дальности
Определение дальности целей основано на измерении времени запаздывания tD радиолокационных сигналов. Классификация методов измерения дальности связана с параметрами сигнала, которые играют основную роль при измерении времени запаздывания. В соответствии с этим метод измерения может быть амплитудным, частотным или фазовым.
Амплитудный метод.
При амплитудном методе измерения определяется время запаздывания характерного изменения амплитуды принимаемого радиолокационного сигнала.
Из различных видов модуляции излучаемых колебаний наиболее употребительной является импульсная
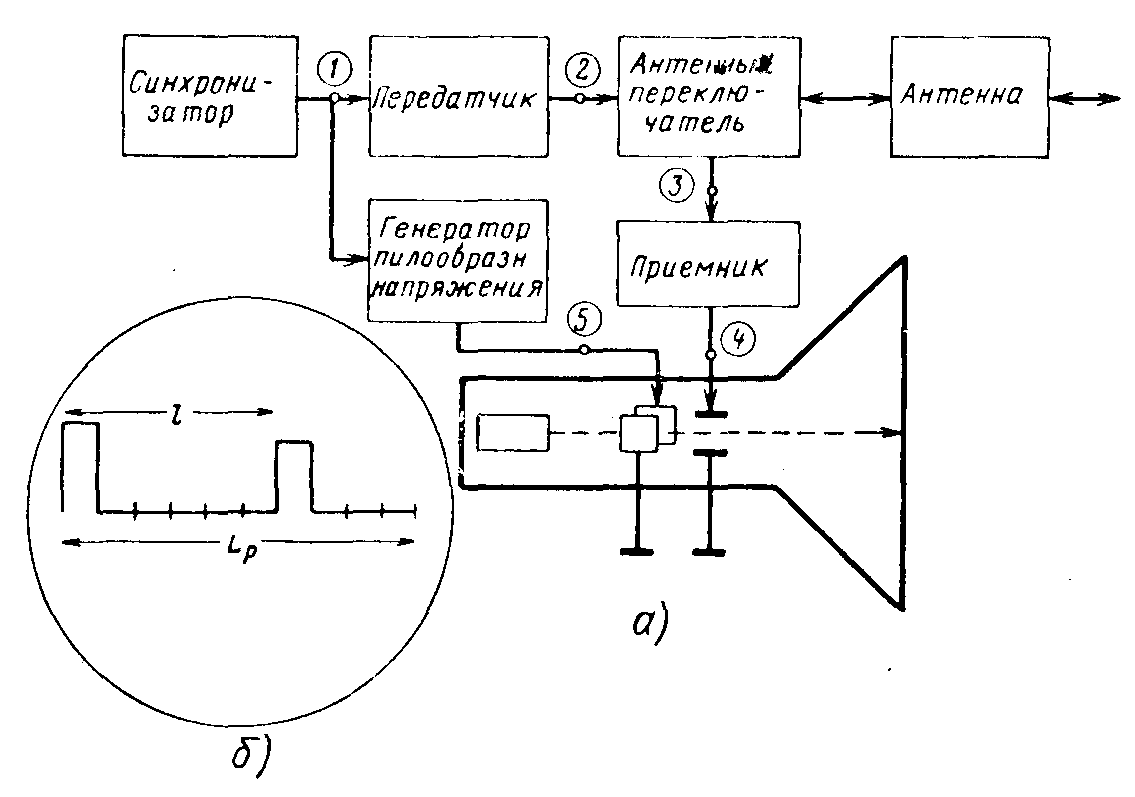
Рисунок 3.1. Функциональная схема импульсного измерителя дальности (а), изображение сигналов на экране электроннолучевого индикатора (б).
Передатчик станции генерирует радиоимпульсы длительностью τи с периодом повторения Ти (напряжение и2 на рис 3.2).
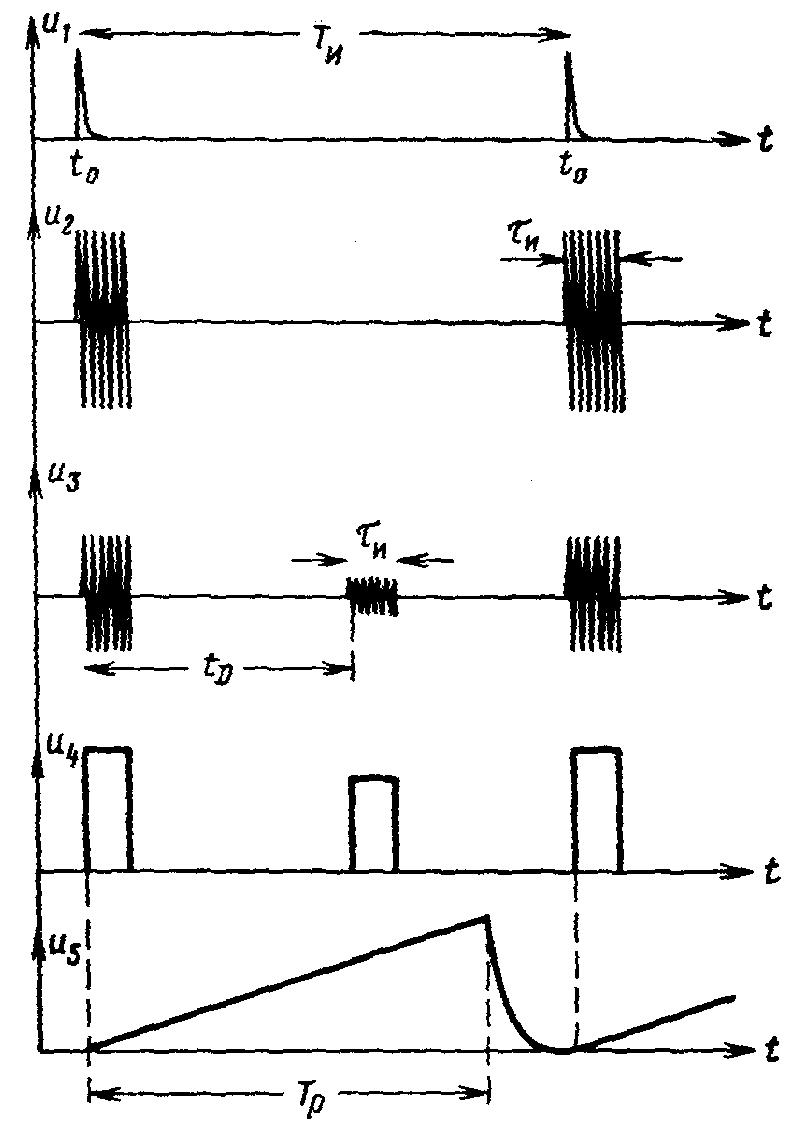
Рисунок. 3.2. Эпюры напряжений в точках 1-5 схемы импульсного дальномера (рис.3.1,а).
Антенный переключатель (АП) подсоединяет антенну к передатчику на генерации (τи) и к приёмнику на всё остальное время. Отражённые импульсные сигналы запаздывают на время tD; на вход приёмника поступают и колебания передатчика, и отражённые сигналы (и3). Одним из наиболее употребительных приборов для измерения времени запаздывания является электроннолучевая трубка. На рис.3.1,а показана трубка с электростатическим управлением. К вертикально отклоняющим пластинам трубки подводятся импульсы напряжения с выхода приёмника и4; к горизонтально отклоняющим пластинам от специальной схемы подводится пилообразное отклоняющее напряжение и5 ( рис 3.2). Передатчик и схема создания пилообразного напряжения запускаются одновременно импульсами синхронизирующего устройство и1, поэтому одновременно с излучением импульса передатчика начинается горизонтальное перемещение пятна по экрану трубки.
Картина, наблюдаемая на индикаторе, иллюстрируется рис.3.1,б: пятно воспроизводит огибающие излучённого и отражённого импульсов, расстояние между которыми l пропорционально дальности обнаруженной цели:
, (2.2)
где – скорость движения пятна по экрану индикатора, откуда
. (2.3)
По положению отражённого сигнала на экране можно отсчитывать дальность целей. К достоинствам импульсных дальномеров следует отнести: возможность построения РЛС с одной антенной; простоту индикаторного устройства; удобство одновременного измерения дальности многих целей; простоту разделения излучаемых импульсов, длящихся очень малое время τи, и принимаемых сигналов.
Основными недостатками импульсного метода являются: необходимость использования больших импульсных мощностей передатчиков; невозможность измерения малых дальностей; большая минимальная дальность станции (определяющаяся дальностью излучаемых импульсов и временем протекания переходных процессов в антенном переключателе), которая составляет сотни или даже тысячи метров.
Частотный метод.
Частотный метод определения дальности основан на использовании частотной модуляции излучаемых непрерывных колебаний; время запаздывания определяется путём измерения разности частот излучённых колебаний и отражённого сигнала. Функциональная схема РЛС с частотной модуляцией изображена на рис 3.3.
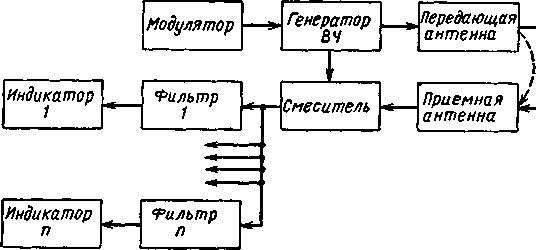
Рисунок 3.3. Функциональная схема измерителя дальности с частотной модуляцией.
Генератор высокой частоты, управляемый модулятором, вырабатывает колебания с частотой, изменяющейся по периодическому закону (рис. 3.4, сплошная линия). Частота сигнала, отражённого от неподвижной цели, будет изменяться по такому же закону, но только со сдвигом по временной оси на время запаздывания tD. На рис. 3.4,а частота отражённых колебаний показана штриховой линией. Отражённые сигналы и колебания генератора подводятся к смесителю. Образующаяся на выходе смесителя разностная частота (рис. 3.4,б) (частота биений) пропорциональна дальности цели.
На рис.3.4,в показано изменение разностной частоты
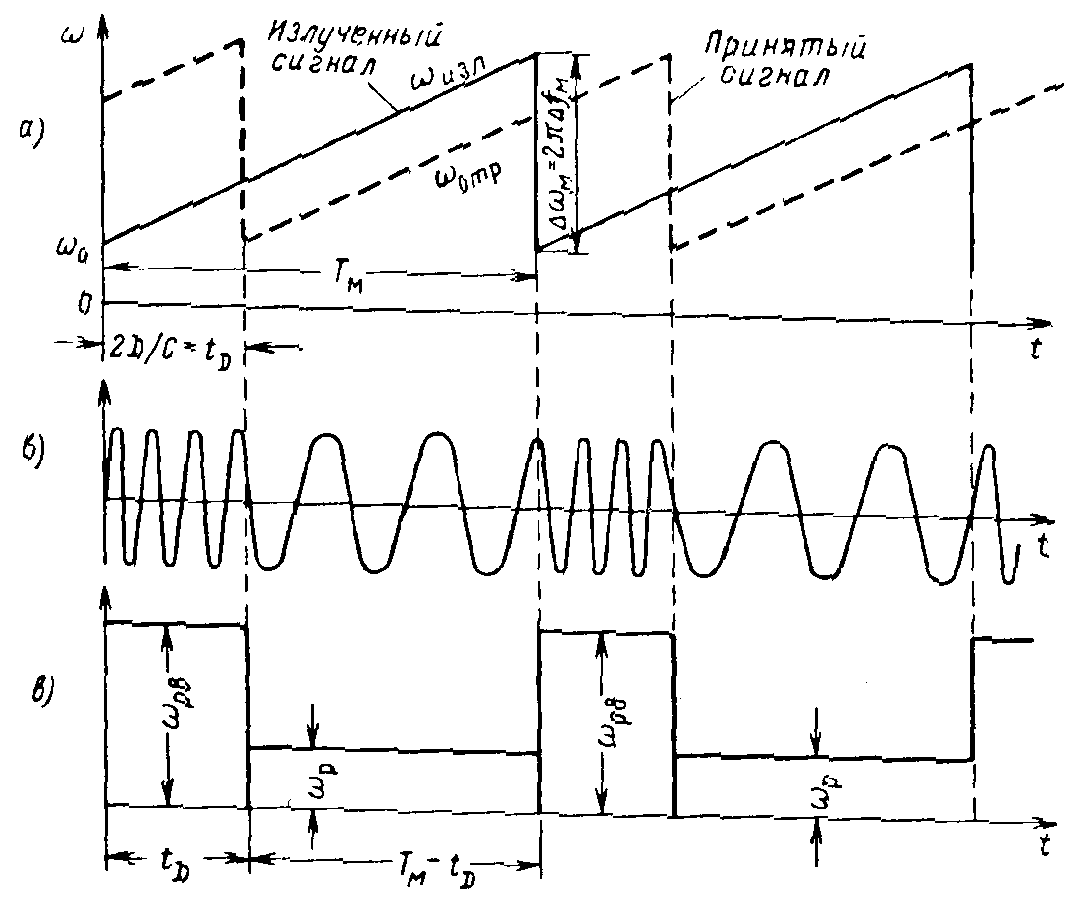
Рисунок 3.4. Изменение частоты излучаемых и принимаемых колебаний: а – частоты излучённого и принятого сигналов; б – преобразованный сигнал (биения); в – изменение частоты преобразованного сигнала.
Для измерения разностных частот используются фильтры или счётчики импульсов. При использовании фильтров возможны два варианта: применяется группа фильтров, настроенных на фиксированные частоты, или один фильтр с переменной настройкой. Попадание сигнала разностной частоты в тот или иной фильтр (на что укажет соответствующий индикатор, например неоновая лампочка) позволит определить дальность цели. Дальномеры рассмотренного типа позволяют измерять очень малые дальности и использовать передатчики с малой мощностью излучения.
Недостатки дальномеров с частотной модуляцией:
– необходимость использования либо двух антенн, либо сложного устройства для разделения излучаемых и принимаемых колебаний;
– ухудшение чувствительности приёмника вследствие просачивания в приёмный тракт через антенну излучения передатчика, подверженного случайным изменениям;
– высокие требования к линейности изменения частоты.
Устройства с большим числом анализирующих фильтров характеризуются также сложностью и громоздкостью анализатора. Если использовать один перестраиваемый фильтр, с помощью которого последовательно просматриваются различные участки дальности, то анализирующее устройство упрощается, но зато резко увеличивается время обзора заданной области.
Фазовые методы.
Фазовые методы основаны на измерении разности фаз излучённых синусоидальных колебаний и принятых радиосигналов.
Измерение угловых координат
Для определения угловых координат целей используются угломерные, или пеленгационные радиолокационные устройства.
Угломерное устройство включает антенну (антенную систему), приёмник для обработки принятых радиолокационных сигналов и измерительное устройство. Одной из основных характеристик угломерного устройства является его пеленгационная характеристика, представляющая собой зависимость выходного напряжения приёмника от направления прихода радиоволны Uвых(φ). В зависимости от того, какой параметр сигнала – амплитуда, частота или фаза – оказывает основное влияние на формирование пеленгационной характеристики, методы измерения угловых координат можно подразделять на амплитудные, частотные или фазовые. Практически находят применение амплитудные и фазовые методы.
Амплитудные методы.
В настоящее время известны и широко используются несколько амплитудных методов: максимума; минимума; сравнения; равносигнальный.
Рассмотрим их существо и принципы технической реализации.
При пеленгации по методу максимума плавно изменяется угловое положение антенны, и она в течение некоторого времени принимает сигналы цели; отсчёт угловой координаты цели производится в тот момент, когда амплитуда сигнала на выходе приёмника достигает наибольшего значения. Функциональная схема соответствующего угломерного устройства показана на рис. 3.5.
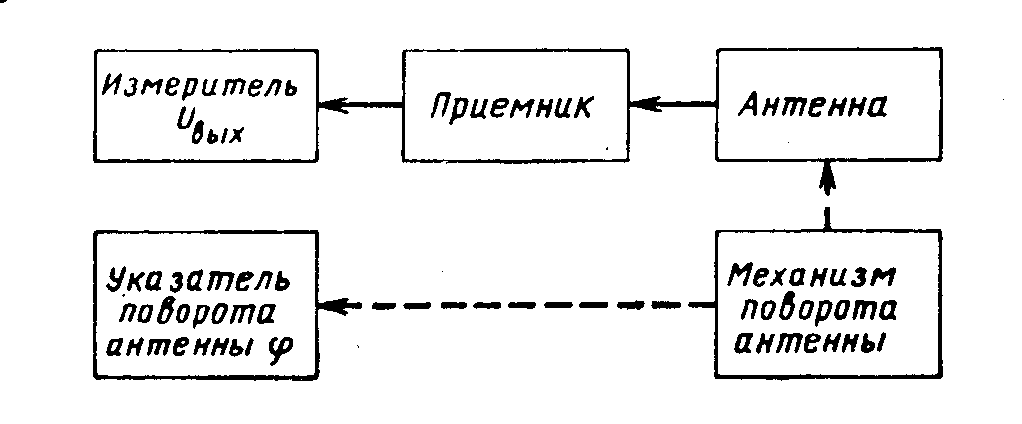
Рисунок 3.5. Функциональная схема угломерного устройства с отсчётом по максимуму.
Механизм поворота вращает антенну; одновременно приводится в действие указатель поворота, по шкале которого отсчитывается направление оси антенны. Когда цель окажется в пределах диаграммы направленности антенны F(φ), в приёмник начнут поступать сигналы. Амплитуда сигналов зависит от углового положения антенны по отношению к цели. При вращении антенны выходное напряжение приёмника Uвых повторяет форму диаграммы направленности антенны (рис. 3.6).
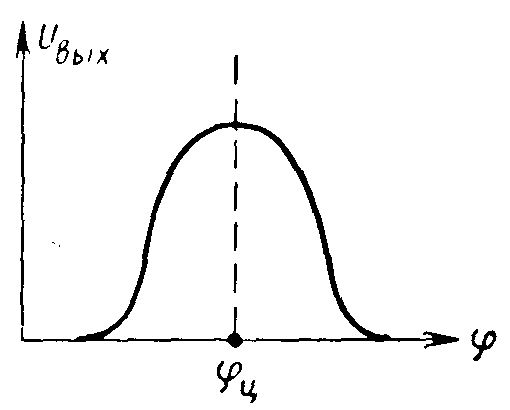
Рисунок 3.6. Пеленгационная характеристика при пеленгации по максимуму.
Это и будет пеленгационная характеристика угломерного устройства
Uвых(φ) = k F(φ), (2.4)
где k – коэффициент пропорциональности.
Когда ось антенны совпадает с направлением на цель, выходное напряжение приёмника достигнет максимума; в этот момент указатель поворота антенны покажет пеленг цели φц.
Достоинствами метода являются простота его технической реализации и получение наибольшей (при прочих равных условиях) амплитуды принимаемого сигнала в момент пеленгации. Основной недостаток метода состоит в относительно низкой точности измерений угловой координаты.
Точность измерения угла характеризуется пеленгационной чувствительностью, представляющей собой крутизну пеленгационной характеристики вблизи направления на цель:
. (2.5)
Чем больше пеленгационная чувствительность, тем выше точность измерения угловой координаты.
При пеленгации по максимуму для диаграмм направленности любого типа пеленгационная чувствительность очень мала (при точном пеленге ), поэтому и точность измерения координат относительно низка.
Метод пеленгации по минимуму отличается тем, что отсчёт угловой координаты производится в момент уменьшения до минимума выходного напряжения приёмника.
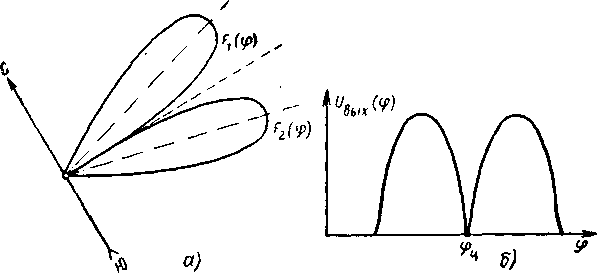
Рисунок 3.7. Диаграмма направленности антенного устройства (а) и пеленгационная характеристика при пеленгации по минимуму (б).
Диаграмма направленности антенны пеленгатора должна иметь в средней части провал до нуля. Этого можно добиться, например, если использовать две антенны, повёрнутые в пространстве одна относительно другой на угол, равный ширине диаграммы направленности по нулевому уровню (рис 3.7,а). Функциональная схема пеленгационного устройства такая же, как и при пеленгации по максимуму (см. рис. 3.5). Изменения амплитуды сигнала на выходе приёмника при повороте антенны характеризуются графиком рис. 3.7,б; аналогичный вид имеет и пеленгационная характеристика Uвых(φ) = k F(φ), где функция F(φ) – результирующая диаграмма направленности.
При пеленгации по минимуму может быть получена высокая точность измерения угловой координаты, так как пеленгационная чувствительность велика. Но амплитуда сигнала вблизи направления пеленга мала; при точном пеленге она становится равной нулю.
Практически по методу минимума можно пеленговать только источники мощного собственного излучения. Поэтому метод пеленгации по минимуму, получивший широкое применение в радионавигации, в радиолокации не используется.
Метод сравнения характеризуется тем, что пеленг цели определяется по соотношению амплитуд сигналов, принятых одновременно двумя антеннами. Функциональная схема пеленгационного устройства, в котором использован метод сравнения, приведена на рис. 3.8.
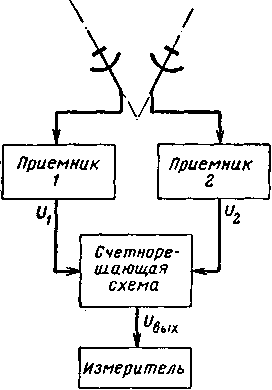
Рисунок 3.8. Функциональная схема пеленгатора, в котором используется метод сравнения.
Основным достоинством метода сравнения является возможность мгновенного определения направления на цель в пределах относительно широкого сектора при неподвижной антенной системе. Наиболее существенным недостатком является относительно низкая точность измерения, существенно меняющаяся в зависимости от вида и взаимного расположения диаграмм направленности антенн, а также от прихода волны.
Частным случаем метода сравнения является равносигнальный метод пеленгации. Он также основан на сравнении амплитуд сигналов, принимаемых двумя антеннами, но для отсчёта углового положения добиваются равенства сигналов. При пеленгации цели по равносигнальному методу антенное устройство поворачивают до тех пор, пока выходное напряжение не окажется равным нулю. В этот момент угловая координата цели определяется по положению антенны.
Равносигнальный метод характеризуется высокой точностью, так как при измерении используется небольшой участок диаграмм направленности (вблизи равносигнального направления) с относительно большой крутизной. Этот метод часто используют для автоматического слежения за целью по угловым координатам.
Равносигнальный метод может быть реализован при использовании одной антенны, диаграмма направленности которой периодически изменяет своё положение в пространстве. В этом случае сравнению подлежат сигналы, принятые в различные моменты времени при разных положениях диаграммы направленности.
Фазовые методы.
Фазовые методы основаны на измерении разности фаз электромагнитных колебаний, принимаемых различными антеннами. Метод характеризуется относительно высокой точностью измерения; он может быть использован для автоматического слежения за целями по угловым координатам. Существенными недостатками фазового метода являются неоднозначность отсчёта и отсутствие разрешения целей.
Методы измерения радиальной скорости
Измерение радиальной скорости основано на определении доплеровского сдвига частоты отражённого сигнала. Схема простейшей станции, обеспечивающей измерение доплеровской частоты сигналов, приведена на рис. 3.9.
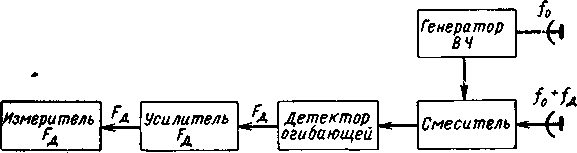
Рисунок 3.9. Функциональная схема измерителя доплеровской частоты.
Генератор высокой частоты (f0) создаёт незатухающие колебания, излучаемые в пространство. Частота сигнала, отражённого от движущейся цели, будет отличаться от f0 на доплеровский сдвиг Fд; отражённый сигнал можно записать таким образом:
.
Принятые колебания смешиваются с колебаниями генератора . На выходе смесителя образуются колебания с частотой Доплера. Огибающая высокочастотных колебаний (частота биений) выделяется с помощью амплитудного детектора. Далее колебания на частоте Fд усиливаются и подводятся к измерителю частоты. Шкала измерителя градуируется прямо в единицах радиальной скорости цели
. (2.6)
Рассмотренному радиолокационному устройству присущи все достоинства и недостатки станций с непрерывным излучением.
К специфическим достоинствам самого метода измерения следует отнести: простоту устройства станции; нечувствительность к медленным уходам частоты генератора.
Наиболее существенные недостатки метода: высокие требования к кратковременной стабильности частоты генератора (за время распространения радиоволн до цели и обратно); влияние любой паразитной модуляции колебаний генератора на работоспособность устройства; возникновение помех работе станции при наличии нескольких целей (на выходе детектора будут образовываться комбинации доплеровских частот и их гармоник ).
13. Характеристики и показатели качества СРНС; точность определения местоположения объектов.
Дата: 2019-02-02, просмотров: 919.