Рисунок 1-2. Связь между временной и частотной областью
Амплитудно-модулированный сигнал.
Амплитудная модуляция это медленное изменение амплитуды колебаний. Ее используют, например, при радиосвязи. Именно в колебаниях амплитуды содержится передаваемая информация. Простой пример амплитудно-модулированного сигнала:
 . (15)
. (15)
Здесь  - частота модуляции,
- частота модуляции,  - частота основного сигнала или несущая частота,
- частота основного сигнала или несущая частота,  называется глубиной модуляции.
называется глубиной модуляции.
Сигнал (15) не трудно записать в виде комбинации синусоид:  . Таким образом, следует ожидать появления трех пиков в спектре.
. Таким образом, следует ожидать появления трех пиков в спектре.
Частотно-модулированный сигнал.
Частотная модуляция – медленные изменения частоты сигнала также используется в радиосвязи. Так известные вам FM-радиостанции получили свое название от способа передачи сигнала – с помощью Frequency Modulation (частотной модуляции).
Частотно модулированное колебание можно записать в следующем виде:
a(t) = A0 cosêòw(t)dt + q0 ú , ω (t) = ω 0 + ks(t), где
ë0 û
A0 – амплитуда модулированного колебания,
ω 0 – несущая частота,
s(t) – модулирующее колебание, k – коэффициент,
θ0 – начальная фаза.
Девиация частоты – максимальное отклонение частоты от частоты несущего колебания, т.е. ωд = ωmax – ω0. Будем считать, что модулирующий сигнал является гармонической функцией тогда:
w(t) = w0 + w д cos(Wt) ,
где Ω – частота модулирующего сигнала.
В этом случае ЧМ – сигнал можно записать в следующем виде:
é t ù
a(t) = A0 cos êò (w0 + w д cos(Wt))dt + Q0 ú = A0 cos(w0t +
ë 0 û
w д sin(Wt) + Q ) = A cos(w t + m sin(Wt) + Q ),
W 0 0 0 0
где m =ωд/Ω – индекс модуляции.
Таким образом, индекс модуляции ЧМ - сигнала представля- ет собой максимальное отклонение фазы.
Для неискаженной передачи сообщения необходимо, чтобы ширина спектра сообщения была мала по сравнению с несущей ω0, а для этого необходимо, чтобы относительное изменение модулирующей функцией ω(t) было мало за один период несу- щего колебания T:
dw(t) << w(t) .
dt T
Спектр ЧМ – сигнала
Рассмотренный выше ЧМ сигнал можно считать частным случаем сигнала с угловой модуляцией.
a(t) = A0 cos(w0t + q (t)) ,
Преобразуем косинус суммы:
a(t) = A0 cosq (t) cosw0t - A0 sinq (t)sinw0t .
A0 cosq (t), A0 sinq (t) - медленно изменяющиеся амплитуды. Итак, ЧМ – сигнал можно рассматривать как сумму двух ампли- тудно-модулированных колебаний (квадрупольных). Для опре- деления спектра каждого из них достаточно сдвинуть на ω0 спектр огибающих амплитуд, т.к. cosθ(t) и sinθ(t) являются не- линейными функциями своего аргумента θ(t), то спектры этих функций могут существенно отличатся от спектра модулирую- щей функции S(t) и при однотональной модуляции возможно возникновение кратных и комбинированных частот. Однако при малых индексах модуляции (m<<1) можно положить θ(t)=cosΩt, sin q (t) » q (t) = mcos Wt , тогда
a(t) = A0 cosw0t - A0m cos Wt sin w0t = A0 cosw0t -
A m sin(w 2 0
+ W)t - A m sin(w
2 0
- W)t ,
т.е. спектр, как и в случае с амплитудной модуляциией, состоит
из несущей и двух боковых частей (но сдвинутых по фазе), а ширина спектра приближенно равна 2Ω.
Но при больших индексах модуляции ( m>>1) за счет появле- ния новых гармоник спектр расширяется и ширина спектра рав- на 2mΩ=2ωд.

| S(ω) m>>1 |
| S(ω) m<<1 |
| S(ω) m=2 |
Рис. 27 Модуль спектральной плотности ЧМ-сигнала при раз- личных значениях индекса модуляции
Частотная модуляция
Вид аналоговой модуляции, при которой, частота несущей изменяется по закону модулирующего низкочастотного сигнала. Амплитуда при этом остается постоянной.
а) — несущая частота, б) модулирующий сигнал, в) результат модуляции
Наибольшее отклонение частоты от среднего значения, называется девиацией.
В идеальном варианте, девиация должна быть прямо пропорционально амплитуде модулирующего колебания.
Спектр при частотной модуляции выглядит следующим образом:
Состоит из несущей и симметрично отстающей от нее вправо и влево гармоник боковых полос, на частоту кратную частоте модулирующего колебания.
Данный спектр представляет гармоническое колебание. В случае реальной модуляции, спектр имеет более сложные очертания.
Различают широкополосную и узкополосную ЧМ модуляцию.
В широкополосной — спектр частот, значительно превосходит частоту модулирующего сигнала. Применяется в ЧМ радиовещании.
В радиостанциях применяют в основном узкополосную ЧМ модуляцию, требующую более точной настройки приемника и соответственно более защищенную от помех.
Спектры широкополосной и узкополосной ЧМ представлены ниже
Спектр узкополосной ЧМ напоминает амплитудную модуляцию, но если учесть фазу боковых полос, то окажется, что эти волны имеют постоянную амплитуду и переменную частоту, а не постоянную частоту и переменную амплитуду (AM). При широкополосной ЧМ амплитуда несущей может быть очень малой, что обусловливает высокую эффективность ЧМ; это значит, что большая часть передаваемой энергии содержится в боковых частотах, несущих информацию.
Основные преимущества ЧМ, перед АМ — энергоэффективность и помехоустойчивость.
Как разновидность ЧМ, выделяют Линейно-частотную модуляцию.
Суть ее заключается в том, что частота несущего сигнала изменяется по линейному закону.
Практическая значимость линейно-частотно-модулированных (ЛЧМ) сигналов заключается в возможности существенного сжатия сигнала при приеме с увеличением его амплитуды над уровнем помех.
ЛЧМ находят применение в радиолокации.
КОСМИЧЕСКИЙ СЕГМЕНТ
Космический сегмент, состоящий из навигационных спутников, представляет собой совокупность источников радионавигационных сигналов, передающих одновременно значительный объем служебной информации. Основные функции каждого спутника - формирование и излучение радиосигналов, необходимых для навигационных определений потребителей и контроля бортовых систем спутника.
Космический сектор включает в себя набор входящих с СНС спутников. Такой набор часто называют орбитальной группировкой, или "созвездием". Установленная на спутниках аппаратура, которая осуществляет передачу на Землю как радиосигналов, на основе которых измеряется расстояние между спутником и потребителем, так и навигационного сообщения, в котором содержится информация об эфемеридах (координатах) спутников, о поправках к показаниям его часов, о так называемом альманахе, несущем в себе усеченную информацию о всех входящих в "созвездие" спутниках, а также некоторую другую служебную информацию.
Конструктивно спутник состоит из основного корпуса и двух достаточно больших по размерам панелей с солнечными источниками питания площадью порядка семи квадратных метров. Кроме радиотехнической аппаратуры, имеется реактивный двигатель, топливо к нему, чтобы имелась возможность корректировать орбитальное положение спутника.
Наиболее ответственным узлом на спутнике является высокостабильный опорный генератор.
На базе использования этого генератора формируются не только все передаваемые со спутника сигналы, но и работают высокочастотные электронные часы, показания которых используются как в процессе выполнения спутниковых измерений, так и для передачи сигналов точного времени.
Каждый спутник СНС НАВСТАР передает сигналы на двух несущих частотах, получивших условные обозначения L1 и L2:
• L1 = 1575,42 МГц (длина волны 19 см);
• L2 = 1227,60 МГц (длина волны 24 см).
Спутниковые сигналы названных несущих частот L-диапазона модулированы двумя кодами[2]: точным P-кодом с частотой 10,23 МГц (длина волны 30 м) и грубым С/А-кодом с частотой 1,023 МГц (длина волны 300 м), а также навигационным сообщением.
Точный P-код предназначается для ограниченного круга пользователей и дает точность дальномерных измерений около 1 м, а грубый С/А-код, ранее предназначавшийся в основном для гражданского использования, обеспечивает определение дальностей с точностью 10 м и более.
НАЗЕМНЫЙ СЕГМЕНТ
В состав наземного сегмента входят космодром, командно-измерительный комплекс и центр управления. Космодром обеспечивает вывод спутников на требуемые орбиты при первоначальном развертывании навигационной системы, а также периодическое восполнение спутников по мере их выхода из строя или выработки ресурса. Главными объектами космодрома являются техническая позиция и стартовый комплекс. Техническая позиция обеспечивает прием, хранение и сборку ракет-носителей и спутников, их испытания, заправку и состыковку. В число задач стартового комплекса входят: доставка носителя с навигационным спутником на стартовую площадку, установка на пусковую систему, предполетные испытания, заправка носителя, наведение и пуск.
Командно-измерительный комплекс служит для снабжения навигационных спутников служебной информацией, необходимой для проведения навигационных сеансов, а также для контроля и управления ими как космическими аппаратами.
Центр управления, связанный информационными и управляющими радиолиниями с космодромом и командно-измерительным комплексом, координирует функционирование всех элементов спутниковой навигационной системы.
ПОЛЬЗОВАТЕЛЬСКИЙ СЕГМЕНТ
В пользовательский сегмент входит аппаратура потребителей. Она предназначается для приема сигналов от навигационных спутников, измерения навигационных параметров и обработки измерений. Для решения навигационных задач в аппаратуре потребителя предусматривается специализированный встроенный компьютер. Разнообразие существующей аппаратуры потребителей обеспечивает потребности наземных, морских, авиационных и космических (в пределах ближнего космоса) потребителей.
Как показал опыт эксплуатации СНС, каждая система определения местоположения имеет свои специфические особенности. Так, система ГЛОНАСС имеет более высокие орбиты относительно плоскости экватора, которые составляют 64,8°. Это позволяет иметь более точные навигационные определения в высоких широтах, т.е. при работе в экваториальных регионах наша система грубее, у американской же системы более грубые измерения над Арктикой и Антарктидой (табл. 6.2).
Космические аппараты ГЛОНАСС равномерно размещаются в трех орбитальных плоскостях, отстоящих друг от друга на 120°, в каждой не менее восьми спутников (в американской в шести плоскостях имеется не менее четырех спутников на каждой орбите).
Такое орбитальное построение позволяет создать сплошное навигационное поле над поверхностью Земли до высот порядка 2000 км. В пределах таких высот пользователь в любой момент может принимать навигационные сигналы каждой системы не менее чем от четырех спутников.
Период обращения спутника вокруг Земли равен примерно 11 – 12 ч, следовательно, спутники делают два оборота вокруг Земли за сутки. Такой период обращения обеспечивает прохождение каждого спутника над областью, контролируемой наземными комплексами управления, по крайней мере раз в сутки.
Комплексы осуществляют постоянный контроль орбит спутников. Любое замеченное отклонение спутника от теоретической (предвычисленной) орбиты спутника передается на борт КА, что позволяет оперативно уточнять орбиту.
Кроме наземных комплексов управления (сектора управления и контроля), как уже отмечалось, архитектура СНС
Таблица 6.2
Основные характеристики спутниковых систем ГЛОНАСС (Россия) и НАВСТАР (США)
| Наименование параметра | ГЛОНАСС | НАВСТАР |
| Начало создания группировки КА | 1982 | 1978 |
| Полный состав созвездия, количество спутников (резерв) | 24 (3) | 24 (3) |
| Расположение созвездия спутников | 8X3 | 4X6 |
| Масса, кг | 1300 | 860 |
| Габариты (с вынесенными солнечными панелями), м | 7,230 | 5,2 |
| Период обращения спутников, ч | 11 ч 16 мин | 11 ч 58 мин |
| Наклон плоскостей орбит к экватору, градусы | 64,8 | 55 |
| Скорость перемещения спутников вдоль орбиты, км/с | 3,9 | 3,9 |
| Средняя высота спутников над Землей, км | 19 150 | 20 200 |
| Геоцентрическая координатная система | ПЗ-90 | WGS-84 |
| Ресурс на орбите, лет | ГЛОНАСС-3 ГЛОНАСС-М-7 ГЛОНАСС-К-Ю | 7,5 |
включает космическую составляющую и аппаратуру потребителей (спутниковые приемники различного класса и направления).
Особенности построения функционирования космического сектора неразрывно связаны с общими требованиями, которые предъявляются ко всей СНС
Вот основные из них:
• накопленный опыт эксплуатации более ранних СНС показал, что высота орбиты относительно земной поверхности, равная примерно 20 000 км, является наиболее оптимальной. Как уже отмечалось ранее, характерный для такой высоты 12-часовой период обращения спутников вокруг земного шара создает определенные удобства как при обслуживании спутников, так и при их использовании потребителями;
• как отмечалось ранее (см. табл. 6.2), для обеспечения возможности одновременных наблюдений не менее четырех спутников в любой точке земного шара необходимо, чтобы общее количество входящих в "созвездие" спутников составляло около 24. Однако, как показал опыт эксплуатации СНС, для надежного решения задач силовых структур этого комплекса недостаточно.
Это обусловлено тем, что в период эксплуатации спутниковых систем наземные комплексы управления вынуждены периодически выводить часть КА из состава орбитальной группировки (ОГ) на плановое и внеплановое обслуживание. К сожалению, количество выводимых КА из состава ОГ ГЛОНАСС велико. Например, случайная выборка: 7 октября 2006 г. из состава ОГ, состоящей из 16 КА, функционировало только 10 КА, а 16 декабря – 11 КА. В период 1994–1995 гг., по официальным данным, ОГ ГЛОНАСС составляла 24 КА. Фактически ни одного дня ОГ не функционировала в полном составе. Поэтому необходимо на каждой их трех орбит иметь 1–2 запасных КА[3]. Следовательно, для надежного решения задач навигационного обеспечения необходимо иметь ОГ ГЛОНАСС в количестве 29–30 аппаратов. Это позволит обеспечить функционирование на орбитах 24 КА.
Содержание и значение надежности.
Непрерывное усложнение судовых технических средств при неизменной надежности комплектующих элементов, узлов и изделий неизбежно ведет к снижению надежности судовых систем, устройств и судов в целом. Выход из строя основного оборудования в силу специфических условий эксплуатации судов создает аварийную обстановку, а иногда вызывает аварии с тяжелыми последствиями, включая человеческие жертвы. Морские транспортные суда длительное время находятся вдали от береговых баз и не могут рассчитывать на своевременную помощь судоремонтных предприятий. Поэтому при недостаточном уровне надежности судового оборудования для обеспечения непрерывного работоспособного состояния судна предусматривают резервирование (дублирование) агрегатов, что еще более усложняет судовую установку.
Непрерывное увеличение количества судов, их размеров и скорости ведет к росту интенсивности движения и требует повышения безопасности плавания, что в значительной степени зависит от надежности всех судовых технических средств. В этом состоят технические предпосылки возникновения проблемы надежности.
Важность проблемы повышения надежности подтверждается также экономическими соображениями. Недостаточный уровень надежности — это дополнительные затраты, вызванные авариями и простоями судов, снижением их скорости и увеличением времени грузовых операций, а также дополнительные расходы на ремонт и ТО оборудования. Увеличение межремонтного периода судов, сокращение численности судовых экипажей (без увеличения напряженности труда) не могут быть успешно реализованы без существенного повышения надежности всех технических средств. В этом состоят экономические предпосылки проблемы надежности.
Таким образом, проблема обеспечения необходимого уровня надежности судового оборудования относится к числу проблем первостепенной важности.
Технический прогресс выдвинул проблему надежности на первое место и зависит от успешного ее решения [3]. Однако недостаточно понимать значение надежности для повышения технико-экономической эффективности создания и использования технических средств. Необходимо уметь количественно оценивать уровень надежности, определять количественную зависимость надежности от режимов использования и условий эксплуатации.
Любая отрасль человеческих знаний, чтобы стать самостоятельной наукой, должна овладеть математическим аппаратом. Для теории надежности основу математического аппарата составляют теория вероятностей и математическая статистика. Теория надежности является инструментом для решения многих практических задач, и в частности задач оптимальной ТЭ. В качестве примера рассмотрим схему использования теории надежности для решения практических задач ТЭ судового оборудования.
1. Зная зависимость показателей надежности от режимов работы и условий эксплуатации, можно рассчитать характеристики надежности для различных возможных режимов плавания (эксплуатации судов), следовательно, можно заранее принять меры, обеспечивающие достаточно высокий уровень надежности даже в самых неблагоприятных условиях эксплуатации.
2. Используя показатели безотказности и ремонтопригодности изделий, можно определить оптимальную периодичность работ по ТО, что позволит повысить уровень надежности при минимальных затратах.
3. Зная показатели долговечности, безотказности элементов и условия пополнения запасов, можно рассчитать оптимальное количество СЗЧ, что позволит избежать затоваривания и простоя оборудования (судов) из-за нехватки каких-либо деталей или узлов.
Используя эксплуатационные данные о надежности судового оборудования, специалисты морской индустрии квалифицированно оценивают техническое состояние судов, планируют ремонт конкретных видов техники, а научно-исследовательские и проектно-конструкторские организации морского транспорта разрабатывают системы и методы ТО судов, обеспечивают использование на судах наиболее надежного оборудования [4, 5, 6].
Основные понятия. Номенклатура показателей надежности.
Работоспособный объект может быть неисправным, однако его неисправность при этом не настолько существенна, чтобы нарушать нормальное функционирование объекта (например, перегорание сигнальной лампы контроля питания на щите при наличии вольтметра; деформация рукоятки управления, практически не влияющая на процесс управления, и т. п.).
При делении объектов на восстанавливаемые и невосстанавливаемые, с одной стороны, и на ремонтируемые и неремонтируемые - с другой, следует иметь в виду, что термин ремонтируемый характеризует приспособленность объекта к проведению ремонта и ТО как внутреннее свойство объекта, определяемое его конструкцией, а термин восстанавливаемыйхарактеризует возможность и целесообразность восстановления работоспособности и исправности объекта в конкретной ситуации при эксплуатации. Объект может быть ремонтируемым, но не восстанавливаемым. Например, многие контрольно-измерительные приборы и элементы автоматики по своей конструкции являются объектами ремонтируемыми, но в условиях судна, как правило, не подлежат ремонту, т. е. восстановлению работоспособности после отказа, и поэтому рассматриваются как невосстанавливаемые. В тоже время имеется немало объектов, которые однозначно можно отнести либо к восстанавливаемым и ремонтируемым, либо к невосстанавливаемым и неремонтируемым. Большинство судовых механизмов: двигатели, насосы, сепараторы и т. д. - являются объектами ремонтируемыми и восстанавливаемыми, а такие изделия, как электрические лампы, шарикоподшипники и т. п. - неремонтируемыми и невосстанавливаемыми. Деление объектов на ремонтируемые и неремонтируемые является определяющим при выборе показателей для оценки их надежности.
Совокупность свойств, обусловливающая пригодность продукции, объекта для удовлетворения определенных потребностей в соответствии с их назначением, называется качеством. Надежность является одним из составляющих свойств качества объекта. В свою очередь, надежность можно рассматривать как сложное свойство, включающее в себя несколько частных свойств, в том числе безотказность, долговечность, ремонтопригодность и сохраняемость.
Безотказность является основным составляющим свойством надежности, так как именно она обеспечивает выполнение объектом своих функций. Этим свойством объект может обладать в период его использования (работы) и в период ожидания, хранения, транспортирования.
Для восстанавливаемых объектов одним из основных свойств является ремонтопригодность, которая может быть качественно оценена следующими характеристиками:
-возможность быстрого доступа к месту повреждения;
-доступность деталей и узлов для осмотра и ремонта;
-наличие средств для определения места и причины отказа, повреждения (сигнализация о неисправности, контрольные точки замеров, маркировка, возможность деления узлов, схем на участки и т. д.);
-простота монтажа;
-возможность и удобство регулировки отдельных параметров, изменяющихся в процессе эксплуатации;
-возможность ремонта и обслуживания с минимальными затратами времени, дефицитных материалов, моющих средств и т. д.
-Все указанные выше характеристики ремонтопригодности могут быть оценены количественно затратами времени и трудоемкостью работ по отысканию и устранению отказов (повреждений), по проведению ТО и ремонта.
Надежность - это свойство объекта выполнять заданные функции, сохраняя во времени значения установленных эксплуатационных показателей (параметров) в заданных пределах, соответствующих заданным режимам и условиям использования, ТО, ремонта, хранения и транспортирования. Надежность - комплексное свойство, которое в зависимости от назначения, конструктивных особенностей и условий эксплуатации может включать безотказность, долговечность, ремонтопригодность и сохраняемость в отдельности, либо определенные сочетания этих свойств как для объекта в целом, так и для его частей. Так, для неремонтируемых объектов надежность включает безотказность, долговечность и сохраняемость, а для объектов восстанавливаемых и ремонтируемых часто определяющим свойством является ремонтопригодность, хотя для них характерно наличие всех четырех составляющих свойств надежности.
Следующая группа понятий, относящихся к надежности, содержит такие события, как повреждение и отказ, которые находятся между собой в таком же соотношении, как исправность и работоспособность. Повреждение может быть существенным (значительным) и являться причиной нарушения работоспособности, т. е. отказа, или несущественным, при котором нарушается исправность объекта, но сохраняется его работоспособность. Некоторые отказы объектов не связаны с их повреждениями. Например, неправильные действия обслуживающего персонала могут привести к несрабатыванию некоторых органов управления установкой, и в результате нарушается ее работоспособность, возникает отказ, хотя никаких повреждений при этом не было.
Необходимо различать отказы изделий, объектов и отказы составных частей (узлов, блоков, деталей). Одно и то же событие - повреждение может являться отказом для составной части и не вызывать отказа объекта в целом.
Качественное определение надежности не позволяет измерить надежность. Между тем для решения практических задач обеспечения и повышения надежности необходимо иметь возможность количественно оценить уровень надежности конкретных объектов. Только количественная оценка надежности позволяет задавать конкретные требования и нормы надежности вновь разрабатываемых изделий; производить расчет надежности при проектировании; сравнивать по надежности различные элементы (объекты) и на этой основе выбирать лучшие, наиболее надежные изделия, проектные и конструкторские решения; рассчитывать сроки службы и ресурсы элементов и определять необходимое количество запасных частей; определять периодичность ТО и планировать ремонт.
Отказ и восстановление - два противоположных случайных события, которые могут быть охарактеризованы соответствующими случайными величинами. В качестве случайных величин можно рассматривать наработку до отказа (между отказами), длительность и трудоемкость восстановления, а также число отказов, возникших за фиксированный промежуток времени.
Наиболее полной характеристикой любой случайной величины является закон распределения, т.е. соотношение, устанавливающее связь между возможными значениями случайной величины и соответствующими им вероятностями. В теории надежности наиболее часто в качестве случайных величин рассматриваются время и количество отказов. Если, например, Т - время безотказной работы объекта, то функцией распределения случайной величины Т называется функция вида:
Q(t) = Р {T< t},
Где: Р {T< t}, вероятность того, что время Т до возникновения данного отказа будет меньше заданного промежутка времени t, т. е. Q(t) - вероятность отказа объекта за время t.
Производная от функции Q(t) называется плотностью вероятности отказа, или плотностью распределения:
f(t) = Q’(t) = dQ / dt.
Показатели безотказности. Пусть под наблюдением находятся п невосстанавливаемых объектов. В процессе работы (эксплуатации) отдельные объекты отказывают, и с течением времени работоспособных объектов становится все меньше. За величину, характеризующую степень надежности объекта в каждый данный момент, принимают отношение числа объектов, отказавших в единицу времени, к числу объектов, работоспособных к данному моменту времени. Этот показатель называется интенсивностью отказовλ (t).
Согласно приведенному определению,
λ (t) = [N(t) – N(t+∆t)] / ∆tN(t),
где: N(t) и N(t+∆t) - количество работоспособных объектов в моменты времени t и t+∆t соответственно.
Для многих невосстанавливаемых объектов по кривой изменения интенсивности отказов во времени можно обозначит три периода: Первый период «жизни» объекта с повышенным уровнем λ (t) называется периодом приработки, так как в это время значительная часть отказов является следствием скрытых дефектов, некачественного монтажа, регулировки. Второй период с относительно постоянным значением λ (t) называется периодом нормальной работы. Третий период - период износа и старения - характеризуется прогрессирующим ростом интенсивности отказа.
Зная форму кривой λ (t) и характер отказов в каждый из указанных периодов, можно принимать активные меры для повышения надежности объекта. Во-первых, необходимо установить такие режимы и длительность испытаний объектов, чтобы сократить количество приработочных отказов и период приработки; во-вторых, рассчитать и организовать профилактическое обслуживание с заменой объектов (элементов) в конце периода нормальной работы, чтобы избежать неожиданных и опасных отказов сложных устройств.
Вероятность безотказной работыР(t) - вероятность того, что в пределах заданной наработки отказ объекта не возникает:
P (t) = exp [- ∫λ (t) dt];
при λ (t) = λ =const P(t) = e- λ t.
Пользуясь принятой выше схемой функционирования невосстанавливаемого объекта, дадим статистическое определение этому показателю надежности. Вероятность безотказной работы - отношение числа N(t) объектов, исправно проработавших до момента t, к общему количеству п объектов, первоначально поставленных под наблюдение:
P (t) = N(t) / n.
Средняя наработка до отказаТ1- математическое ожидание наработки объекта до первого отказа.
При экспоненциальном распределении времени до отказа, когда λ = const ,
T1 = 1 / λ.
Восстанавливаемый объект в течение всего срока службы может отказать много раз. После каждого отказа производится восстановление работоспособности путем замены отказавших элементов, регулировки, ремонта, и объект снова включается в работу. Последовательность отказов восстанавливаемого объекта образует поток отказов, который характеризуется ведущей функцией потока Ω (t), представляющей собой математическое ожидание, т. е. среднее значение количества отказов на момент времени t. При этом время восстановления не учитывается, так как Тb<T0. Рассмотрим показатели безотказности восстанавливаемых объектов, пользуясь схемой их функционирования.
Параметр потока отказов ω (t) - среднее количество отказов восстанавливаемого объекта в единицу времени, взятое для рассматриваемого момента времени t:
ω (t) = m(∆t)/N∆t,
где: m(∆t) - количество отказов за промежуток времени ∆t;
N- общее количество объектов под наблюдением.
Для большинства реальных потоков отказов
Ω (t) = ∫ ω (t) dt.
При экспоненциальном распределении наработки между отказами
ω (t)= λ.
Изменение функции ω(t) во времени аналогичен изменению функции λ(t). Имеется явно выраженный период приработки с увеличенным значением ω(t), период нормальной эксплуатации с ω (t)=const, но период износа и старения наступает значительно позднее, чем у λ (t). Это можно объяснить тем, что восстановление работоспособности после отказов часто осуществляется путем замены отказавших элементов на новые, а износовые отказы объекта в целом определяются сроком службы базовых деталей (корпуса, станины).
Наработка на отказ - отношение наработки восстанавливаемого объекта к математическому ожиданию числа его отказов в течение этой наработки:
T0 = t / M (m).
При экспоненциальном распределении наработки между отказами
T0 = 1 / ω.
Вероятность безотказной работы Р(t), как показатель надежности, может применяться и для восстанавливаемых объектов. Однако, в этом случае он характеризует безотказность объекта с учетом системы планового ТО либо рассматривается вероятность безотказной работы за период между очередными ТО.
Перечисленные выше показатели безотказности характеризуют абсолютный уровень надежности конкретных объектов.
Наряду с этим для определения наименее надежных элементов сложных объектов, для выделения наиболее часто встречающихся видов отказов применяются показатели относительной безотказности - коэффициенты отказов, которые показывают долю отказов элементов определенного типа в общем потоке отказов объекта (системы, сложного изделия) либо долю отказов определенного вида (характера) в общем количестве отказов объекта:
Выбор номенклатуры показателей надежности и, в частности, безотказности для конкретных объектов производится исходя из их функционального назначения, конструктивного исполнения, последствий отказов. Так, например, для объектов ответственного назначения, отказ которых может вызвать аварию судна или сложных агрегатов, сорвать выполнение задания, как правило, нормируется вероятность безотказной работы за время выполнения задания (рейса, якорной или швартовной операции и т. д.). Для объектов, отказ которых приводит к материальным потерям, нормируется средняя наработка до отказа или наработка на отказ (соответственно для невосстанавливаемых и восстанавливаемых объектов). Для комплектующих элементов основным показателем является интенсивность отказов или параметр потока отказов.
Показатели долговечности.Показатели долговечности могут быть разбиты на две группы - технические ресурсы и сроки службы.
Технический ресурс - наработка объекта от начала эксплуатации или ее возобновления после капитального ремонта до наступления предельного состояния.
Срок службы — календарная продолжительность эксплуатации объекта от начала эксплуатации или ее возобновления после капитального ремонта до наступления предельного состояния. В таблице 3 приведена классификация показателей долговечности в зависимости от метода определения и характера предельного состояния.
Коэффициент готовности – вероятность того, что объект окажется работоспособным в произвольный момент времени, кроме планируемых периодов, в течение которых использование объекта по назначению не предусмотрено:
kг = T0 / (T0 + ¯Tв).
Коэффициент технического использования – отношение времени пребывания объекта в работоспособном состоянии tр за некоторый период эксплуатации к сумме времени работоспособного состояния и простоев, обусловленных ТО tто и ремонтами tв +tрем за тот же период эксплуатации:
kти = tp / tp + tв + tто + tрем).
Коэффициенты kг и kти применяются для оценки надежности агрегатов, машин, механизмов, устройств и судов в целом. Наряду с ними большое практическое значение имеют такие комплексные показатели, как средняя суммарная стоимость ТО за определенный период эксплуатации; средняя суммарная стоимость ремонтов, а также другие удельные показатели, например трудоемкость или стоимость ТО, приходящаяся на условную единицу наработки (например, 1000 часов), на один цилиндр и т.д.
Основы теории модуляции, спектральный анализ модулированных сигналов.
Модуляция — это процесс преобразования одного или нескольких информационных параметров несущего сигнала в соответствии с мгновенными значениями информационного сигнала.
В результате модуляции сигналы переносятся в область более высоких частот.
Использование модуляции позволяет:
§ согласовать параметры сигнала с параметрами линии;
§ повысить помехоустойчивость сигналов;
§ увеличить дальность передачи сигналов;
§ организовать многоканальные системы передачи (МСП с ЧРК).
Модуляция осуществляется в устройствах модуляторах. Условное графическое обозначение модулятора имеет вид:
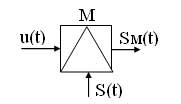
Рисунок 1 - Условное графическое обозначение модулятора
При модуляции на вход модулятора подаются сигналы:
u(t) — модулирующий, данный сигнал является информационным и низкочастотным (его частоту обозначают W или F);
S(t) — модулируемый (несущий), данный сигнал является неинформационным и высокочастотным (его частота обозначается w0 или f0);
Sм(t) — модулированный сигнал, данный сигнал является информационным и высокочастотным.
В качестве несущего сигнала может использоваться:
§ гармоническое колебание, при этом модуляция называется аналоговой или непрерывной;
§ периодическая последовательность импульсов, при этом модуляция называется импульсной;
§ постоянный ток, при этом модуляция называется шумоподобной.
Так как в процессе модуляции изменяются информационные параметры несущего колебания, то название вида модуляции зависит от изменяемого параметра этого колебания.
1. Виды аналоговой модуляции:
§ амплитудная модуляция (АМ), происходит изменение амплитуды несущего колебания;
§ частотная модуляция (ЧМ), происходит изменение частоты несущего колебания;
§ фазовая модуляция (ФМ), происходит изменение фазы несущего колебания.
2. Виды импульсной модуляции:
§ амплитудно-импульсная модуляция (АИМ), происходит изменение амплитуды импульсов несущего сигнала;
§ частотно-импульсная модуляция (ЧИМ), происходит изменение частоты следования импульсов несущего сигнала;
§ Фазо-импульсная модуляция (ФИМ), происходит изменение фазы импульсов несущего сигнала;
§ Широтно-импульсная модуляция (ШИМ), происходит изменение длительности импульсов несущего сигнала.
Что такое спектр?
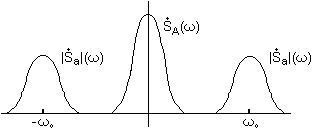
Так чем же является спектр в контексте нашего обсуждения? Спектр – это набор синусоидальных волн, которые, будучи надлежащим образом скомбинированы, дают изучаемый нами сигнал во временной области. На Рис. 1-1 показана волновая форма сложного сигнала. Давайте предположим, что мы ожидали увидеть чисто синусоидальный сигнал. И хотя форма явно демонстрирует нам, что сигнал не является чистой синусоидой, она не дает определенного ответа на вопрос о причинах данного явления. На Рис. 1-2 показан наш сложный сигнал во временной и в частотной области. В частотной области показана амплитуда для каждой синусоидальной волны в спектре в зависимости от частоты. Как видно, в данном случае спектр состоит лишь из двух волн. Теперь мы знаем, отчего наш сигнал не является чистой синусоидой: в нем содержится еще одна волна, вторая гармоника в нашем случае. Означает ли это, что измерения во временной области можно вообще не проводить? Отнюдь. Временная область является предпочтительной для многих измерений, а для некоторых является единственно возможной. К примеру, только во временной области можно измерить длительность фронта и спада импульса, выбросы и биения.
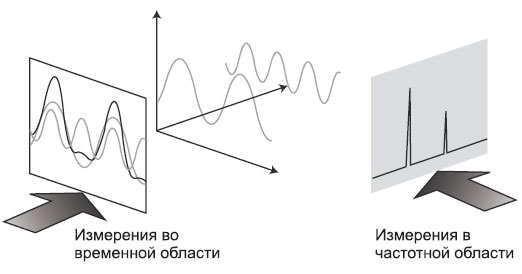
Рисунок 1-2. Связь между временной и частотной областью
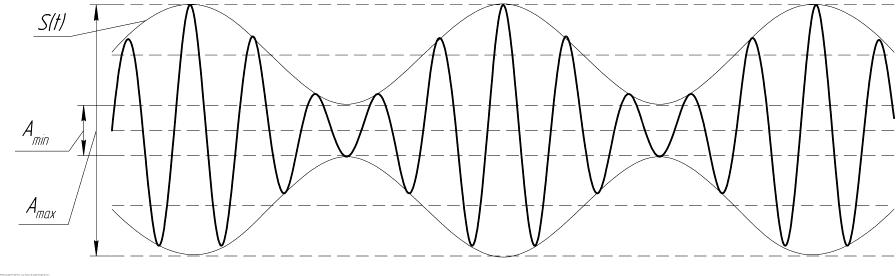
Амплитудно-модулированный сигнал.
Амплитудная модуляция это медленное изменение амплитуды колебаний. Ее используют, например, при радиосвязи. Именно в колебаниях амплитуды содержится передаваемая информация. Простой пример амплитудно-модулированного сигнала:
. (15)
Здесь - частота модуляции, - частота основного сигнала или несущая частота, называется глубиной модуляции.
Сигнал (15) не трудно записать в виде комбинации синусоид: . Таким образом, следует ожидать появления трех пиков в спектре.
Частотно-модулированный сигнал.
Частотная модуляция – медленные изменения частоты сигнала также используется в радиосвязи. Так известные вам FM-радиостанции получили свое название от способа передачи сигнала – с помощью Frequency Modulation (частотной модуляции).
Частотно модулированное колебание можно записать в следующем виде:
a(t) = A0 cosêòw(t)dt + q0 ú , ω (t) = ω 0 + ks(t), где
ë0 û
A0 – амплитуда модулированного колебания,
ω 0 – несущая частота,
s(t) – модулирующее колебание, k – коэффициент,
θ0 – начальная фаза.
Девиация частоты – максимальное отклонение частоты от частоты несущего колебания, т.е. ωд = ωmax – ω0. Будем считать, что модулирующий сигнал является гармонической функцией тогда:
w(t) = w0 + w д cos(Wt) ,
где Ω – частота модулирующего сигнала.
В этом случае ЧМ – сигнал можно записать в следующем виде:
é t ù
a(t) = A0 cos êò (w0 + w д cos(Wt))dt + Q0 ú = A0 cos(w0t +
ë 0 û
w д sin(Wt) + Q ) = A cos(w t + m sin(Wt) + Q ),
W 0 0 0 0
где m =ωд/Ω – индекс модуляции.
Таким образом, индекс модуляции ЧМ - сигнала представля- ет собой максимальное отклонение фазы.
Для неискаженной передачи сообщения необходимо, чтобы ширина спектра сообщения была мала по сравнению с несущей ω0, а для этого необходимо, чтобы относительное изменение модулирующей функцией ω(t) было мало за один период несу- щего колебания T:
dw(t) << w(t) .
dt T
Спектр ЧМ – сигнала
Рассмотренный выше ЧМ сигнал можно считать частным случаем сигнала с угловой модуляцией.
a(t) = A0 cos(w0t + q (t)) ,
Преобразуем косинус суммы:
a(t) = A0 cosq (t) cosw0t - A0 sinq (t)sinw0t .
A0 cosq (t), A0 sinq (t) - медленно изменяющиеся амплитуды. Итак, ЧМ – сигнал можно рассматривать как сумму двух ампли- тудно-модулированных колебаний (квадрупольных). Для опре- деления спектра каждого из них достаточно сдвинуть на ω0 спектр огибающих амплитуд, т.к. cosθ(t) и sinθ(t) являются не- линейными функциями своего аргумента θ(t), то спектры этих функций могут существенно отличатся от спектра модулирую- щей функции S(t) и при однотональной модуляции возможно возникновение кратных и комбинированных частот. Однако при малых индексах модуляции (m<<1) можно положить θ(t)=cosΩt, sin q (t) » q (t) = mcos Wt , тогда
a(t) = A0 cosw0t - A0m cos Wt sin w0t = A0 cosw0t -
A m sin(w 2 0
+ W)t - A m sin(w
2 0
- W)t ,
т.е. спектр, как и в случае с амплитудной модуляциией, состоит
из несущей и двух боковых частей (но сдвинутых по фазе), а ширина спектра приближенно равна 2Ω.
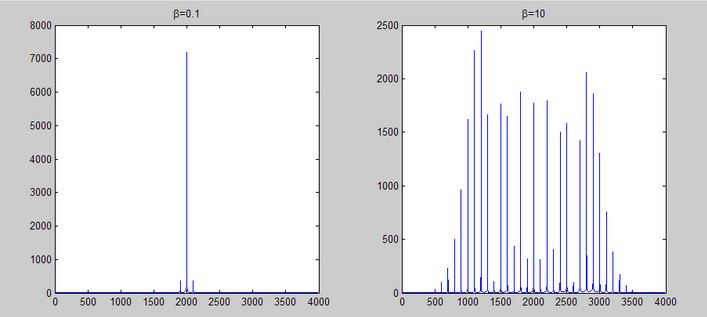
Но при больших индексах модуляции ( m>>1) за счет появле- ния новых гармоник спектр расширяется и ширина спектра рав- на 2mΩ=2ωд.
| S(ω) m>>1 |
| S(ω) m<<1 |
| S(ω) m=2 |
Рис. 27 Модуль спектральной плотности ЧМ-сигнала при раз- личных значениях индекса модуляции
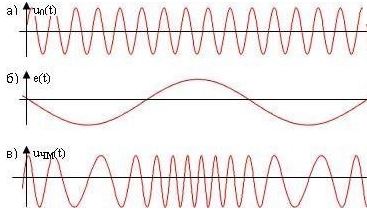
Частотная модуляция
Вид аналоговой модуляции, при которой, частота несущей изменяется по закону модулирующего низкочастотного сигнала. Амплитуда при этом остается постоянной.
а) — несущая частота, б) модулирующий сигнал, в) результат модуляции
Наибольшее отклонение частоты от среднего значения, называется девиацией.
В идеальном варианте, девиация должна быть прямо пропорционально амплитуде модулирующего колебания.
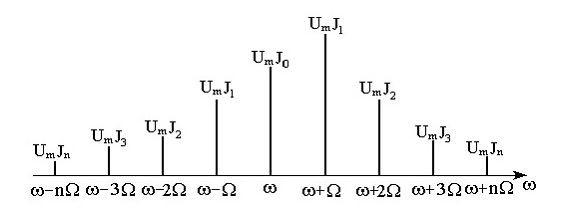
Спектр при частотной модуляции выглядит следующим образом:
Состоит из несущей и симметрично отстающей от нее вправо и влево гармоник боковых полос, на частоту кратную частоте модулирующего колебания.
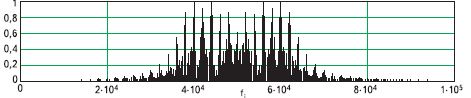
Данный спектр представляет гармоническое колебание. В случае реальной модуляции, спектр имеет более сложные очертания.
Различают широкополосную и узкополосную ЧМ модуляцию.
В широкополосной — спектр частот, значительно превосходит частоту модулирующего сигнала. Применяется в ЧМ радиовещании.
В радиостанциях применяют в основном узкополосную ЧМ модуляцию, требующую более точной настройки приемника и соответственно более защищенную от помех.
Спектры широкополосной и узкополосной ЧМ представлены ниже
Спектр узкополосной ЧМ напоминает амплитудную модуляцию, но если учесть фазу боковых полос, то окажется, что эти волны имеют постоянную амплитуду и переменную частоту, а не постоянную частоту и переменную амплитуду (AM). При широкополосной ЧМ амплитуда несущей может быть очень малой, что обусловливает высокую эффективность ЧМ; это значит, что большая часть передаваемой энергии содержится в боковых частотах, несущих информацию.
Основные преимущества ЧМ, перед АМ — энергоэффективность и помехоустойчивость.
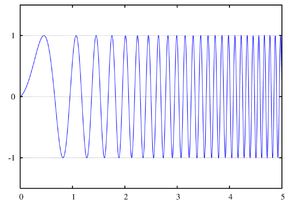
Как разновидность ЧМ, выделяют Линейно-частотную модуляцию.
Суть ее заключается в том, что частота несущего сигнала изменяется по линейному закону.
Практическая значимость линейно-частотно-модулированных (ЛЧМ) сигналов заключается в возможности существенного сжатия сигнала при приеме с увеличением его амплитуды над уровнем помех.
ЛЧМ находят применение в радиолокации.
Дата: 2019-02-02, просмотров: 1095.