Лекция 4
Автоматические системы регулирования
Список источников
[1] Главы 5-7
1. Одноконтурная АСР. Структура АСР, объект и регулятор.
3. Обзор типовых линейных алгоритмов регулирования.
◦ - П-алгоритм;
◦ - И – алгоритм;
◦ - ПИ-алгоритм;
◦ - ПИД-алгоритм.
4. АСР с типовыми алгоритмами регулирования. Сравнение переходных процессов.
5. Двухпозиционный регулятор.
6. Показатели качества работы АСР (прямые и интегральные)
прямые показатели качества;
интегральные показатели качества.
7. Устойчивость линейных динамических систем.
8. Понятие запаса устойчивости.
9. Расчет АСР на заданный запас устойчивости.
10. Способы повышения качества АСР. АСР с дополнительными информационными сигналами.
Одноконтурная АСР
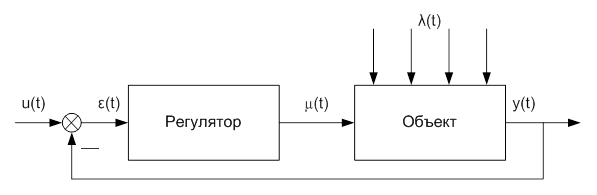
Структура одноконтурной АСР приведена на рис. 4-1. Если рассматривать укрупненно и упрощенно, то такая АСР состоит из объекта, регулятора, связей между ними и воздействующих на систему внешних сигналов.
|
Рис. 4-1. Структура одноконтурной АСР.
Типовые алгоритмы регулирования
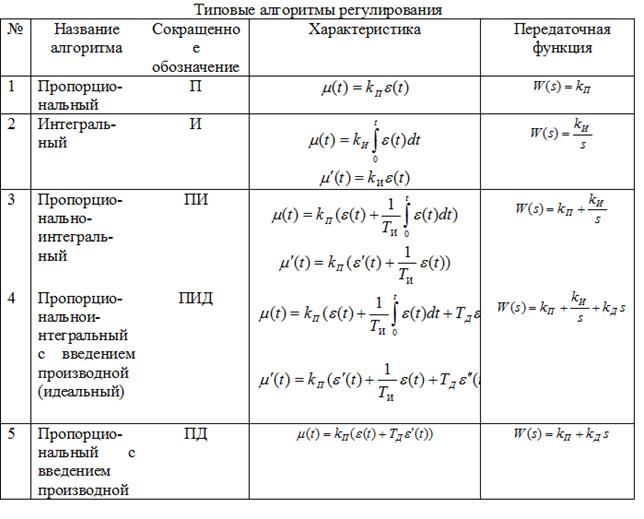
Рассмотрим типовые линейные алгоритмы регулирования. К типовым линейным алгоритмам относятся П, И, ПИ, ПИД-алгоритмы. Также может применяться ПД-алгоритм. ПИД-алгоритмы бывают идеальные и реальные (в зависимости от применяемого дифференцирующего звена). В реальной практике применяется реальный ПИД-алгоритм, но во многих случаях расчеты можно с достаточной точностью вести по идеальному.
То же можно сказать и о ПД-алгоритм – в нем может применяться идеальное или реальное дифференцирующее звено, в реальной практике, разумеется всегда применяется алгоритм с реальным дифференцирующим звеном.
Выбор того или иного алгоритма регулирования зависит от принятых стандартных технических решений, необходимой точности и некоторых других соображений.
Описания типовых линейных алгоритмов регулирования приведены в Таблице 4-1.
Таблица 4-1.
Типовые линейные алгоритмы регулирования
|
Показатели качества работы АСР
Показатели качества работы АСР бывают прямые и интегральные.
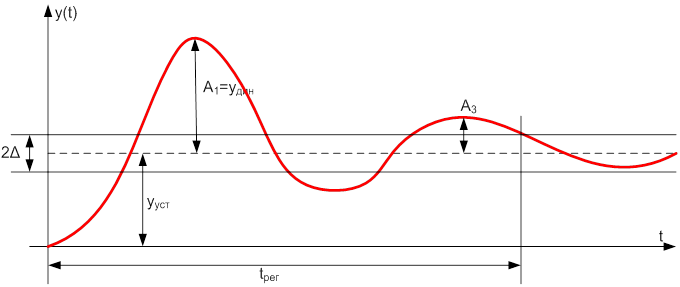
Прямые показатели качества:
1. Динамическое отклонение.
2. Статическое отклонение (остаточное отклонение, остаточная неравномерность).
3. Время регулирования.
4. Степень затухания
5. Перерегулирование.
Определение прямых показателей качества проиллюстрировано на рис. 4-6.
|
Рис. 4-6. Определение прямых показателей качества работы АСР.
Интегральные показатели качества:
1. Линейный: 
2. Модульный: 
3. Квадратичный: 
Устойчивость линейных динамических систем. Критерии устойчивости
Критерии Гурвица, Михайлова, Найквиста
Критерий Рауса-Гурвица
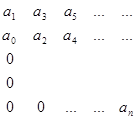
Это алгебраический критерий, основанный на использовании коэффициентов характеристического уравнения (13-2). Нужно составить квадратную матрицу, также она называется матрицей Гурвица, это квадратная матрица n×n. Матрица имеет вид:
 .
.
Матрица состоит из коэффициентов характеристического уравнения, свободные места в матрице заполняются нулями. Далее последовательно вычисляются диагональные миноры, все диагональные миноры должны быть положительными, чтобы система была устойчива.
Если хотя бы один минор отрицателен, то система неустойчива.
Если коэффициенты характеристического уравнения знакопеременны, то система обязательно неустойчива, и матрицу можно не составлять.
Критерий Михайлова
Критерий Михайлова так же работает на основании характеристического уравнения и получаемого на его основе характеристического вектора или вектора Михайлова.
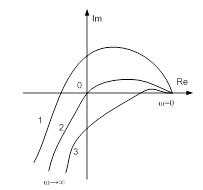
Система устойчива, если при изменении частоты от нуля до бесконечности годограф характеристического вектора, начинаясь на вещественной положительной полуоси проходит последовательно против часовой стрелки n квадрантов комплексной плоскости (где n – порядок характеристического уравнения, он же порядок системы). Говоря иначе, характеристический вектор должен совершать поворот против часовой стрелки на угол n*90.
Для получения характеристического вектора в характеристическом уравнении нужно заменить s на jω. Формула для характеристического вектора приводится ниже:
 . (13-3)
. (13-3)
Если годограф проходит через начало координат, то система находится на границе устойчивости. Если годограф проходит не через то количество квадрантов или не в том порядке, то система неустойчива. Годографы для устойчивой системы, неустойчивой системы и системы на границе устойчивости показаны на рис. 13-2.
|
Рис. 13-2. Примеры годографов характеристического вектора для различных систем.
Годограф 1 соответствует устойчивой системе, годограф 2 соответствует системе на границе устойчивости, годограф 3 - неустойчивой системе.
Критерий Найквиста
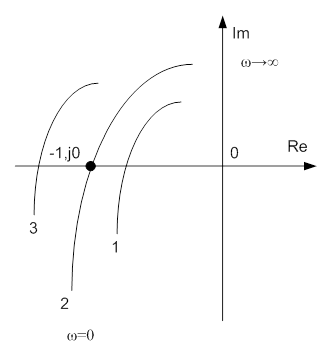
Критерий Найквиста применяется для АСР с обратной связью и позволяет судить о поведении замкнутой АСР по поведению разомкнутой. Он формулируется следующим образом.
Если разомкнутый контур устойчив и годограф КЧХ разомкнутой АСР не охватывает точку на комплексной плоскости с координатами -1, j0, то после замыкания система сохранит устойчивость.
Если годограф проходит через эту точку, система находится на границе устойчивости. Если годограф охватывает эту точку, система неустойчива. Примеры годографов приведены на рис. 13-3.
|
Рис. 13-3. Примеры годографов КЧХ разомкнутой АСР.
Запас устойчивости
Синтез систем управления
При синтезе САУ необходимо определить алгоритм регулятора и алгоритм командного блока, при этом первым определяется алгоритм регулятора. Для решения задачи синтеза необходимо задаться критерием оптимальности.
Критерий оптимальности для регулятора можно определить следующим образом: алгоритм функционирования регулятора оптимален, если достигается минимум принятого показателя точности регулирования при выполнении ограничений на заданный запас устойчивости и робастность.
Запас устойчивости и робастность системы определяются характеристиками замкнутого контура системы они не зависят от вида возмущающих и командных воздействий.
Необходимо учитывать, что возмущения действуют по нескольким каналам, динамические свойства этих каналов различны, таким образом, степень затухания для этих каналов может также существенно различаться.
Существуют задачи полного и ограниченного синтеза АСР. В рамках данного курса рассмотрим задачу ограниченного синтеза.
Ограниченный синтез – выбор типового алгоритма регулирования и расчет его оптимальных параметров настройки.
Лекция 4
Автоматические системы регулирования
Список источников
[1] Главы 5-7
1. Одноконтурная АСР. Структура АСР, объект и регулятор.
3. Обзор типовых линейных алгоритмов регулирования.
◦ - П-алгоритм;
◦ - И – алгоритм;
◦ - ПИ-алгоритм;
◦ - ПИД-алгоритм.
4. АСР с типовыми алгоритмами регулирования. Сравнение переходных процессов.
5. Двухпозиционный регулятор.
6. Показатели качества работы АСР (прямые и интегральные)
прямые показатели качества;
интегральные показатели качества.
7. Устойчивость линейных динамических систем.
8. Понятие запаса устойчивости.
9. Расчет АСР на заданный запас устойчивости.
10. Способы повышения качества АСР. АСР с дополнительными информационными сигналами.
Одноконтурная АСР
Структура одноконтурной АСР приведена на рис. 4-1. Если рассматривать укрупненно и упрощенно, то такая АСР состоит из объекта, регулятора, связей между ними и воздействующих на систему внешних сигналов.
|
|
Рис. 4-1. Структура одноконтурной АСР.
Дата: 2018-12-28, просмотров: 456.