Основным назначением гидропривода, как упоминалось выше, является преобразование приведенной к выходному звену механической характеристики приводящего двигателя в соответствии с требованиями нагрузочной характеристики рабочей машины или механизма. При этом широкие возможности объемного гидропривода позволяют использовать в качестве привода почти любой машины или механизма наиболее простой и дешевый нерегулируемый трехфазный асинхронный двигатель с короткозамкнутым ротором.
Рассмотрим совместную работу приводящего асинхронного двигателя с объемным гидроприводом. Пусть вал электродвигателя соединен непосредственно с валом насоса, т. е. моменты на валах и частоты их вращения одинаковы: МЭ = МН, nэ = nн, Для упрощения задачи пусть и вал гидромотора также непосредственно соединен с валом машины или механизма, т. е. Мд = Мм, nД=nМ. Требуется при заданной нагрузке на валу машины определить рабочий режим гидромотора и электродвигателя.
Для решения поставленной задачи наиболее рационально привести (пересчитать) моментную характеристику электродвигателя Мэ =ƒ(п) к валу гидромотора и, решив совместно уравнения приведенной характеристики Мд=f (п) и нагрузочной характеристики Мм = / (n), определить рабочий режим гидромотора. Затем, зная рабочий режим гидромотора, обратным пересчетом определить рабочий режим электродвигателя. Пересчет характеристик следует выполнять по уравнению, которое в данном случае будет иметь вид:
|
|
Для наглядности задача по приведению моментных характеристик и определению рабочих режимов машин решена графически.
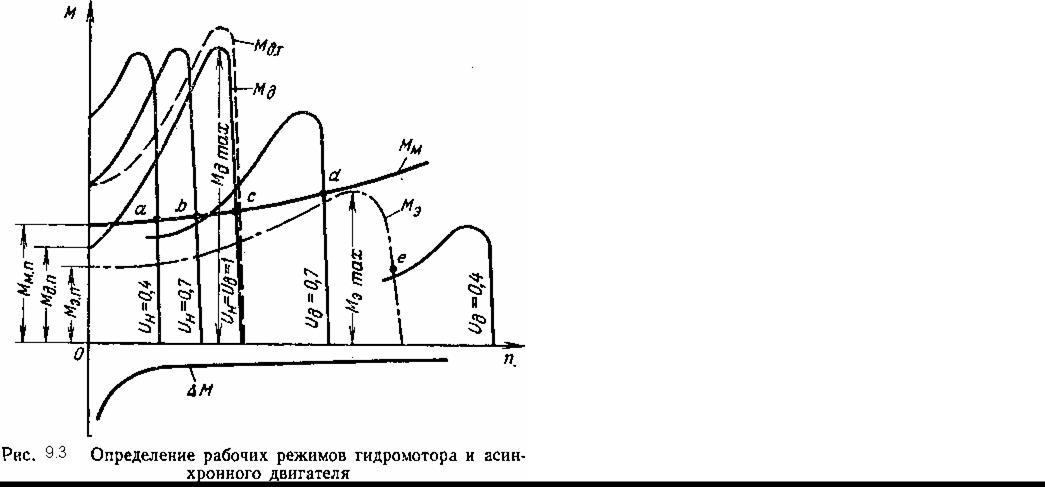
Причем при пересчете характеристики Мэ = ƒ(п) по уравнению (9.5) приняты: η= 1, Rм = 1/i = const. На рис. 9.3 при построении взят kM = 2. Затем из приведенной теоретической ха рактеристики Мл.т = f (п) вычтен момент сопротивления ∆M, соответствующий потерям мощности в гидроприводе:
|
где ∑∆N — суммарные потери мощности.
Приведенная к валу гидромотора моментная характеристика за вычетом ∆M = ƒ(п) показана на рис. 9.3 кривой МД = f (п) При UH = U Д = 1. Как видно из рисунка, моментная характеристика в рабочей зоне (правее горба) стала еще более жесткой, чем у электродвигателя (при значительном изменении момента n≈const). Значительно увеличился максимальный момент Мдmax двигателя. Однако пусковой момент Мд. п остался малым.
Рабочий режим гидромотора будет определяться точкой пересечения характеристик МД =ƒ(п) и Мм = f ( n )—точка с при Uн = 1. Для определения рабочего режима электродвигателя достаточно воспользоваться координатами точки с и уравнением (9.5). На рис. 9.3 рабочий режим электродвигателя показан nочкой е.
При регулировании подачи насоса (Uн = var) момент на валу гидромотора почти не меняется (см. рис. 9.2, б). Поэтому почти неизменным будет и общий вид характеристики Мд =ƒ(n). С изменением частоты вращения будет осуществляться параллельное перемещение характеристики влево с уменьшением параметра UH (на рис. 9.3 показаны искусственные характеристики при Uн =
0,7 и UН = 0,4). В действительности значения моментов будут несколько уменьшаться с уменьшением подачи насоса вследствие увеличения значений ∆M. Однако Мд мах при этом будет оставаться достаточно большим. Этим обстоятельством пользуются на Практике для увеличения пускового момента гидромотора при включении его под нагрузкой.
При изменении рабочего объема гидромотора момент на его валу с увеличением частоты вращения уменьшается (см. рис. 9.1, б). Поэтому моментная характеристика Мд =ƒ(п) будет смещаться от естественной Uн = Uд = 1) вправо и вниз по соответствующим законам (на рис. 13.6 кривые при Uд = 0,7 и U Д =0,4).
При регулировании частоты вращения гидромотора точка, Определяющая его рабочий режим, будет перемещаться по кривой Мм = f (п) — точка а и b при UH = 0,4 и UH = 0,7 и точка d при UД = 0,7. При этом с уменьшением рабочего объема гидромотора значение МД может уменьшиться настолько, что работа привода на данную нагрузку станет невозможной (например, при UД - 0,4).
При дроссельном регулировании полученная ранее силовая характеристика выходного звена гидродвигателя является одновременно и приведенной характеристикой электродвигателя. Причем при расположении дросселя последовательно с гидродвигателем мощность насоса, а следовательно, и электродвигателя, не меняется с изменением нагрузки ни выходном звене гидродвигателя (при ∆Q > 0). Поэтому электродвигатель будет работать с постоянным моментом, а следова-тельно, и скоростью на валу. Эти параметры будут определяться давлением, на которое настроен переливной клапан.
При расположении дросселя параллельно гидродвигателю мощность насоса, а следовательно, и электродвигателя будет меняться с изменением нагрузки на выходном звене гидродвигателя. Поэтому несколько изменится и частота вращения вала электродвигателя, а следовательно, и подача насоса. Таким образом, в этом случае приведенная характеристика к выходному звену гидродвигателя, почти не будет меняться с изменением нагрузки.
Вопросы для самопроверки.
1. Для чего используется . совместная работа объемного привода с приводящим двигателем.
2. По какой формуле осуществляется пересчет характеристик?
Литература: 2, 3
Раздел 10. ГИДРОМУФТЫ.
Дата: 2018-12-28, просмотров: 388.