Взаимосвязь ТАУ с другими техническими науками
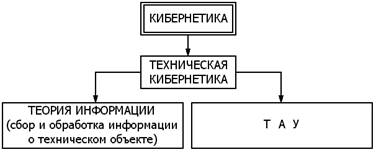
Кибернетика- наука об оптимальном управлении сложными системами (технические объекты, технологические процессы, живые организмы, коллективы, предприятия и др.). В кибернетике выделяется раздел технической кибернетики, как науки об управлении техническими объектами. В технической кибернетике выделяется теория информации – наука, занимающаяся сбором и обработкой информации, необходимой для управления техническими объектами и ТАУ.
Системой автоматического управления - называют совокупность управляемого объекта и автоматического управляющего устройства (регулятора), взаимодействующих между собой в соответствии с определенным алгоритмом управления.
САУ – это такая система, в которой управляющие функции выполняются автоматически, т.е. без участия человека.
АСУ (автоматизированная система управления) - это система, в которой часть управляющих функций выполняется автоматическими управляющими устройствами, а часть функций (наиболее важных и сложных) выполняется человеком.
Основные понятия и определения ТАУ
Автоматическое регулирование - это поддержание постоянной заданной величины, характеризующей состояние объекта управления или изменение этой величины по определенному заданному закону регулирования. При этом это поддержание осуществляется путем измерения управляемых величин объекта управления и выработкой управляющего воздействия на данный объект.
Автоматическое управление - это автоматическое выполнение ряда функций, обеспечивающих оптимальное функционирование системы с возможностью выбора из различных вариантов функционирования. При этом данные функции выполняются по алгоритмам, достигающим цель управления.
САР – система автоматического регулирования;
ТАР – теория автоматического регулирования;
САУ – система автоматического управления;
ТАУ – теория автоматического управления.
Основные характеристики ОУ
Объектом управления в ТАУ могут быть любые технические объекты, технологические процессы, а также более простые САУ. Любой объект характеризуется рядом величин, определяющих процессы в самом объекте, влияние внешней среды на объект, управляющие сигналы с регулятора.
Внешними воздействиями называют величины, влияющие на объект извне. Внешние воздействия бывают двух типов:
1. Управляющее воздействие (управляющий сигнал, управляющая входная величина) – это величина, характеризующая влияние регулятора на объект.
2. Возмущения-внешние воздействия, которые не управляют объектом, но оказывают влияние на функционирование объекта. Возмущения делятся на нагрузку – это внешние воздействия, обусловленные работой системы и помехи - вредное влияние внешней среды, обусловленное побочными явлениями в объекте.
 Величины, характеризующие изменения в самом объекте, называются внутренними величинами или состоянием объекта. Среди них следует выделить управляемую величину, по наблюдениям за которой и вырабатывается управляющее воздействие регулятора.
Величины, характеризующие изменения в самом объекте, называются внутренними величинами или состоянием объекта. Среди них следует выделить управляемую величину, по наблюдениям за которой и вырабатывается управляющее воздействие регулятора.
 - возмущение;
- возмущение;
 - управляющее воздействие;
- управляющее воздействие;
 - управляемая величина.
- управляемая величина.
Примеры объектов управления
1.
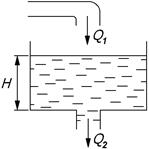
у = Н - управляемая величина (уровень жидкости);
х = Q 1 - управляющее воздействие (приток жидкости);
z = Q 2 – нагрузка (расход жидкости).
Динамическая характеристика:
где S – площадь поперечного сечения резервуара.
Y = f ( X , Z , t ) – взаимосвязь всех координат.
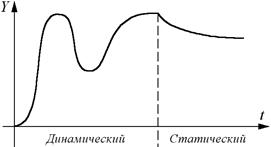
Каждый объект характеризуется двумя характеристиками (режимами): статической и динамической.
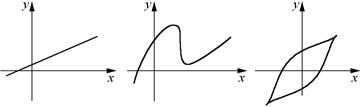
Статическая характеристика (установившийся режим) – это характеристика, в которой постоянное входное воздействие Х и возмущение Z постоянны во времени, тогда управляемая величина Y = f ( X , Z ).
Статические характеристики бывают монотонные и экстремальные.
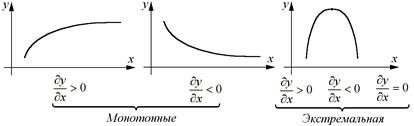
Частным случаем статической характеристики является квазистатическая характеристика, когда на вход подается гармоническое воздействие (sin), тогда в установившемся режиме тоже будет гармоническая величина.
Динамическая характеристика, когда управляемая величина Y не является постоянной во времени и описывается следующим уравнением: Y ( t ) = f ( X ( t ), Z ( t ), t ). Все переменные описываются системой обыкновенных дифференциальных уравнений (ОДУ), либо системой нелинейных дифференциальных уравнений (НДУ).
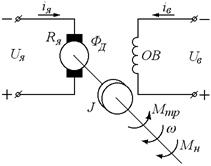
2. Электродвигатель постоянного тока.
Фд - магнитный поток двигателя;
i я - ток якоря двигателя;
U я - напряжение якоря двигателя;
R я - сопротивление якоря двигателя;
i в - ток обмотки возбуждения;
U в - напряжение обмотки возбуждения;
Мтр - момент трения, возникающий на валу двигателя;
w - частота вращения вала двигателя;
J - момент инерции механизма, приведенного к валу двигателя;
Мнагр - момент нагрузки на валу двигателя.
Запишем уравнения:
 - динамические характеристики.
- динамические характеристики.
При статической характеристике все производные зануляются.
a 1 и c 1 -конструктивные параметры двигателя;
Фд - является нелинейной функцией от тока возбуждения;
Мтр - является нелинейной функцией от частоты вращения вала двигателя;
Управляющим воздействием является Х = U я ( U в ), управляемой величиной – У = w, нагрузка (внешнее воздействие) – Z = U в ( U я ), Мнагр, Мтр – помеха.
Классификация САУ
Классификационные признаки САУ выделяют три крупные группы:
1. Классификация по характеру динамических процессов в системе.
2. Классификация по характеристикам управления.
3. Классификация по другим признакам.
Непрерывность.
а) САУ бывают непрерывные - это такие системы, в которых во всех звеньях непрерывному во времени входному сигналу соответствует непрерывный во времени выходной сигнал.
Для того чтобы система была непрерывная, необходимо наличие непрерывных статических характеристик системы.
б) дискретные САУ- это такие системы, в которых хотя бы в одном звене непрерывному входному сигналу соответствует дискретный выходной сигнал (или импульс). Такое звено, называется импульсным.
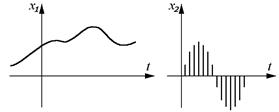
К дискретным системам, как разновидность, относятся цифровые САУ, в которых функции регулятора выполняет цифровое устройство, а выходная величина представляет собой цифры.
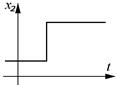 в) релейные САУ (системы релейного действия) - это системы, в которых хотя бы в одном звене непрерывной входной величине соответствует выходная величина, изменяющаяся скачком.
в) релейные САУ (системы релейного действия) - это системы, в которых хотя бы в одном звене непрерывной входной величине соответствует выходная величина, изменяющаяся скачком.
Статическая характеристика релейных систем имеет точку разрыва.
2. Линейность.
а) 1. Обыкновенные линейные системы (с сосредоточенными параметрами) – это такие системы, в которых в каждом из звеньев динамические процессы описываются обыкновенными линейными уравнениями. Статическая характеристика таких систем имеет линейный вид. Параметры (коэффициенты) этой системы постоянны во времени.
а) 2. Особые линейные системы, среди которых различают:
1. линейные системы с переменными параметрами- это такие САУ, в которых хотя бы одни параметры системы изменяются во времени, например, коэффициент усиления.
2. линейные САУ с распределенными параметрами- это такие САУ, динамика которых описывается частными производными.
3. линейные системы с запаздыванием- это такие САУ, в которых присутствует хотя бы одно звено чистого запаздывания (непрерывному входному сигналу соответствует непрерывный выходной сигнал, сдвинутый по времени на t, где t - время запаздывания).
б) Нелинейные системы - это такие САУ, в которых хотя бы одно звено описывается нелинейным уравнением или имеется нелинейность иного вида, такая как произведение двух переменных, квадратный корень, степень и др.
Среди нелинейных систем также выделяют особые нелинейные системы:
б) 1. нелинейные системы с переменными параметрами;
б) 2. нелинейные системы с распределенными параметрами;
б) 3. нелинейные системы с чистым запаздыванием;
б) 4. К нелинейным системам относятся релейные системы.
По принципу управления.
В зависимости от конфигурации цепи воздействий различают три вида систем управления: с разомкнутой цепью воздействий, с замкнутой цепью и комбинированные.
а) В автоматической системе управления с разомкнутой цепью воздействий (кратко – разомкнутая система) входными воздействиями управляющего устройства являются только внешние (задающие и возмущающие) воздействия, т.е. в них не осуществляется контроль управляемой величины.
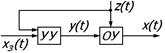
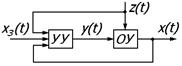
Разомкнутые системы можно разделить в свою очередь на два класса: системы, осуществляющие управление в соответствии с изменением только задающего воздействия (рис. а) и системы, управляющие при изменении возмущения (рис. б).
 Алгоритм управления разомкнутой системы первого типа имеет вид:
Алгоритм управления разомкнутой системы первого типа имеет вид:
Чаще всего оператор Ау устанавливает пропорциональную связь между задающим воздействием хз( t ) и управляющим воздействием y ( t ), а сама система в этом случае осуществляет программное управление.
Системы первого типа работают с достаточной эффективностью лишь при условии, если влияние возмущений на управляемую величину невелико и все элементы разомкнутой цепи обладают достаточно стабильными характеристиками.
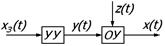
 Система управления по возмущению – это такая система, в которой для уменьшения отклонения управляемой величины от заданной измеряется возмущающее воздействие, обрабатывается по определенному алгоритму и накладывается на прежний управляющий сигнал.
Система управления по возмущению – это такая система, в которой для уменьшения отклонения управляемой величины от заданной измеряется возмущающее воздействие, обрабатывается по определенному алгоритму и накладывается на прежний управляющий сигнал.
В системах управления по возмущению управляющее воздействие зависит от возмущающего и задающего воздействий:

причем в большинстве случаев оператор Ау может быть разделен на две не зависящие друг от друга составляющие:

Оператор Аз соответствует, как правило, простому пропорциональному преобразованию сигнала хз( t ), а оператор Ав может быть и более сложным, например, устанавливающим нелинейное соотношение между сигналами ув( t ) и z ( t ).
В большинстве случаев разомкнутые системы управления по возмущению выполняют функции стабилизации управляемой величины.
Преимущество разомкнутых систем управления по возмущению – их быстродействие: они компенсируют влияние возмущения еще до того, как оно появится на выходе объекта. Но применимы эти системы лишь в том случае, если на управляемую величину действует одно или два возмущения и есть возможность измерения этих возмущений.
 б) В автоматической системе с замкнутой цепью воздействий (кратко – замкнутая система), на вход управляющего устройства поступают как внутреннее (контрольное) воздействие, так и внешнее (задающее).
б) В автоматической системе с замкнутой цепью воздействий (кратко – замкнутая система), на вход управляющего устройства поступают как внутреннее (контрольное) воздействие, так и внешнее (задающее).
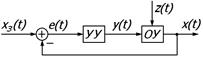
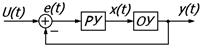
Система управления по отклонению или замкнутая система – это такая система, в которой для уменьшения отклонения управляемой величины от заданной, измеряется данное отклонение, обрабатывается по определенному алгоритму управляющее воздействие.
Управляющее воздействие в замкнутой системе формируется в большинстве случаев в зависимости от величины и знака отклонения истинного значения управляемой величины от ее заданного значения:

где  - сигнал ошибки (называемый также сигналом рассогласования).
- сигнал ошибки (называемый также сигналом рассогласования).
В замкнутой системе контролируется непосредственно управляемая величина и тем самым при выработке управляющих воздействий учитывается действие всех возмущений, влияющих на управляемую величину. В этом заключается преимущество замкнутых систем. Но из-за наличия замкнутой цепи воздействий в этих системах могут возникать колебания, которые в некоторых случаях делают систему неработоспособной. Кроме того, сам принцип действия замкнутых систем (принцип управления по отклонению) допускает нежелательные изменения управляемой величины: вначале возмущение должно проявиться на выходе, система «почувствует» отклонение и лишь потом выработает управляющие воздействия, направленные на устранение отклонения. Такая «медлительность» снижает эффективность управления. Несмотря на наличие определенных недостатков, этот принцип широко применяют при создании автоматических систем.
 Во всех замкнутых системах существуют обратные связи, которые подразделяются на жесткие обратные связи и гибкие обратные связи. Жесткие обратные связи – это такие связи, в которых обратный сигнал существует как в динамическом, так и в статическом режиме. Гибкие обратные связи – связи, в которых сигнал обратной связи существует только в динамическом режиме.
Во всех замкнутых системах существуют обратные связи, которые подразделяются на жесткие обратные связи и гибкие обратные связи. Жесткие обратные связи – это такие связи, в которых обратный сигнал существует как в динамическом, так и в статическом режиме. Гибкие обратные связи – связи, в которых сигнал обратной связи существует только в динамическом режиме.
В комбинированных системах создают две цепи воздействий – по заданию и по возмущению, и управляющее воздействие формируется согласно оператору

Эффективность работы комбинированной системы управления всегда больше, чем у порознь функционирующих замкнутой или разомкнутой систем.
2. По управляющему воздействию (задающее воздействие).
В зависимости от характера изменения задающего воздействия во времени автоматические системы управления разделяются на три класса: стабилизирующие, программные и следящие системы.
 а) Стабилизирующая автоматическая система управления (система стабилизации) – это система, алгоритм функционирования которой содержит предписание поддерживать значение управляемой величины постоянным:
а) Стабилизирующая автоматическая система управления (система стабилизации) – это система, алгоритм функционирования которой содержит предписание поддерживать значение управляемой величины постоянным:

Стабилизирующие системы самые распространенные в промышленной автоматике. Их применяют для стабилизации различных физических величин, характеризующих состояние технологических объектов.
б) Алгоритм функционирования программной автоматической системы содержит предписание изменять управляемую величину в соответствии с заранее заданной функцией времени f ( t ):
 .
.
в) Следящая автоматическая система управления предназначена для изменения управляемой величины в соответствии с изменениями другой величины, которая действует на входе системы и закон изменения которой заранее не известен:
,
но f ( t ) заранее не известна.
Следящие системы используют обычно для дистанционного управления перемещением объектов в пространстве. Управляемой величиной в этом случае является либо расстояние (перемещаемого объекта) от какой-либо начальной точки, либо угол поворота (вращаемого объекта), отсчитываемый от начального положения. Следящие системы применяют также для дистанционной передачи показаний.
г) Самонастраивающиеся системы (адаптивные или экстремальные) U ( t )= extr ( Ui ( t )), входной сигнал U ( t ) выбирается наилучшим из множества сигналов в соответствии с целью управления.
Наиболее часто принцип автоматического поиска применяют для управления объектами, характеристики которых имеют экстремальный характер. Целью управления является отыскание и поддержание управляющих воздействий, соответствующих экстремальному значению управляемой величины. Такие системы поиска называют экстремальными системами.
3. Свойства в установившемся режиме .
а) Статические системы - это такие системы, в которых при заданном воздействии, которое стремится к постоянному, отклонение управляющей величины также стремится к постоянной величине, отличной от нуля.
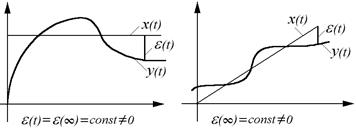
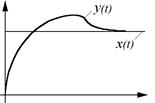
б) Астатические системы - это такие системы, в которых отклонение управляющей величины при любом постоянном задающем воздействии стремится к нулю.
Типовые динамические звенья
Алгоритмические звенья, которые описываются обыкновенными дифференциальными уравнениями первого и второго порядка, получили название типовых динамических звеньев.
Типовые динамические звенья подразделяются на:
1. безынерционное звено (усилительное);
2. апериодическое звено;
3. колебательное звено;
4. идеальное дифференцирующее звено;
5. реальное дифференцирующее звено;
6. идеальное интегрирующее звено;
7. реальное интегрирующее звено;
8. форсирующее звено;
9. звено чистого запаздывания.
Безынерционное звено
Безынерционное звено является простейшим среди всех типовых звеньев. Оно передает сигнал со входа на выход мгновенно, без искажений его формы. В звене может происходить только усиление или ослабление мгновенных значений входной величины.
Связь между мгновенными значениями входной величины x ( t ) и выходной величины y ( t ) описывается алгебраическим уравнением

Передаточные свойства звена определяются лишь одним параметром – передаточным коэффициентом k.
При единичном ступенчатом воздействии x ( t )=1( t ), приложенном в момент t=0, выходная величина мгновенно изменяется и принимает значение k (рис.а).
1. Переходная характеристика звена имеет вид
2. Импульсная переходная характеристика (функция веса) (рис.б)
3. Уравнение звена в операционной форме

отсюда передаточная функция
4. Амплитудно-фазовая характеристика (АФХ) звена описывается функцией

которой на комплексной плоскости соответствует одна точка на действительной оси (рис.е).
5. Амплитудно-частотная характеристика (АЧХ)
представляет собой прямую, параллельную оси частот (рис.в).
Это означает, что сигналы любой частоты (от нуля до бесконечности) проходят через безынерционное звено с одинаковым отношением амплитуд выходной и входной величин, равным k.
6. Выражение для фазовой частотной характеристики (ФЧХ) (рис.г)

показывает, что безынерционное звено не создает фазовых сдвигов между входной и выходной величиной. Это и оправдывает название звена.
7. Логарифмическая амплитудная частотная характеристика (ЛАЧХ) безынерционного звена

так же, как и его АЧХ, является прямой линией, параллельной оси абсцисс (рис.д).
 |
Графики соответствующих характеристик изображены на рис.:
 На алгоритмических схемах безынерционное звено изображают в виде прямоугольника, внутри которого указывают буквенное обозначение или числовое значение передаточного коэффициента k (см. рис.).
На алгоритмических схемах безынерционное звено изображают в виде прямоугольника, внутри которого указывают буквенное обозначение или числовое значение передаточного коэффициента k (см. рис.).
Пример:
Здесь U - входная характеристика;
I - выходная характеристика.
Примерами могут также служить любая электрическая цепь, состоящая из сопротивлений и являющаяся усилительным звеном; рычаги и зубчатые передачи. В практике усилительные звенья встречаются очень редко.
Апериодическое звено
Динамика процесса описывается следующим уравнением:
где k- передаточный коэффициент или коэффициент усиления, Т-постоянная времени, характеризующая инерционность звена.
 1. Переходная характеристика:
1. Переходная характеристика:
1) 
2) В точке ноль строят касательную переходной характеристики, определяют точку пересечения с линией k. Абсцисса этой точки и есть постоянная времени.
2. Импульсная переходная характеристика, или функция веса, звена может быть получена путем дифференцирования функции h ( t ):
3. Передаточная функция:
 Применим преобразование Лапласа к уравнению:
Применим преобразование Лапласа к уравнению:
Структурная схема звена при этом будет выглядеть следующим образом:
4. АФХ:
Подставляя в передаточную функцию p = j w, получим амплитудно-фазовую функцию:
 5. АЧХ:
5. АЧХ:

График АЧХ строится по точкам:
Здесь w с – частота среза.
Гармонические сигналы малой частоты (w < wс) пропускаются звеном хорошо – с отношением амплитуд выходной и входной величин, близким к передаточному коэффициенту k. Сигналы большой частоты (w > wс) плохо пропускаются звеном: отношение амплитуд существенно коэффициента k. Чем больше постоянная времени Т, т.е. чем больше инерционность меньше звена, тем меньше АЧХ вытянута вдоль оси частот, или, тем уже полоса пропускания частот.
Т.о. инерционное звено первого порядка по своим частотным свойствам является фильтром низкой частоты.
6.ФЧХ:
ФЧХ инерционного звена первого порядка равна:
Чем больше частота входного сигнала, тем больше отставание по фазе выходной величины от входной. Максимально возможное отставание равно 900. При частоте wс=1/Т сдвиг фаз равен –450.
7.ЛАЧХ:
Рассмотрим теперь ЛАЧХ звена. Точная ЛАЧХ описывается выражением:

При построении ЛАЧХ апериодического звена прибегают к асимптотическим методам или, другими словами, строят асимптотический график ЛАЧХ.
На втором участке наклон асимптотической ЛАЧХ составляет 20 дБ/дек.
От первых двух точек эта характеристика ЛАЧХ в точке среза будет меньше асимптотической ЛАЧХ на величину  .
.
Шаблон поправки
 Для построения ЛАЧХ апериодических звеньев в литературе приводится шаблон поправки.
Для построения ЛАЧХ апериодических звеньев в литературе приводится шаблон поправки.
В пределах одной декады ЛАЧХ вокруг частоты w с претерпевает наибольшие изменения. Шаблон таких изменений уже вычислен и приведен в литературе.
Примеры апериодических звеньев
 |
Колебательное звено
Динамика процессов в колебательном звене описывается уравнением:
 ,
,
где k- коэффициент усиления звена; Т- постоянная времени колебательного звена;  - коэффициент демпфирования звена (или коэффициент затухания).
- коэффициент демпфирования звена (или коэффициент затухания).
В зависимости от величины коэффициента демпфирования различают четыре типа звеньев:
а) колебательное 0<  <1;
<1;
б) апериодическое звено II порядка >1;
в) консервативное звено =0;
г) неустойчивое колебательное звено <0.
1. Переходная характеристика колебательного звена:
Амплитуды первых двух колебаний определяют величину -  .
.
Чем ближе коэффициент затухания к единице, тем меньше амплитуда колебаний, чем меньше Т, тем быстрее устанавливаются переходные процессы.
При x >1 колебательное звено называется апериодическим звеном второго порядка (последовательное соединение двух апериодических звеньев с постоянными времени Т1 и Т2).
|
 , или можно записать так
, или можно записать так  .
.
Здесь w 0 – величина, обратная постоянной времени (  );
);  .
.
Такое звено в литературе называют консервативным звеном.
Все переходные характеристики будут колебаться вдоль величины k.
2. Импульсная переходная характеристика:
 3.Передаточная функция:
3.Передаточная функция:
4.АФХ:

График АФХ будет выглядеть следующим образом:
Это характеристика для колебательного звена и для апериодического звена второго порядка.
Для апериодического звена -  .
.
А в случае б) формула АФХ совпадает со случаем а).
 -
-
- АФХ для консервативного звена.
 5.АЧХ:
5.АЧХ:
 .
.
АЧХ при частоте  имеет максимум (резонансный пик), равный
имеет максимум (резонансный пик), равный
 .
.
Отсюда видно, что, чем меньше коэффициент x, тем больше резонансный пик.
 Т.о., по графику АЧХ видно, что колебательное звено, как и все инерционные звенья, хорошо пропускает сигналы низкой частоты и плохо – сигналы высокой частоты; если частота гармонического входного сигнала близка к частоте собственных колебаний звена, то отношение амплитуды выходного сигнала к амплитуде входного больше передаточного коэффициента k.
Т.о., по графику АЧХ видно, что колебательное звено, как и все инерционные звенья, хорошо пропускает сигналы низкой частоты и плохо – сигналы высокой частоты; если частота гармонического входного сигнала близка к частоте собственных колебаний звена, то отношение амплитуды выходного сигнала к амплитуде входного больше передаточного коэффициента k.
6.ФЧХ:
Для случая б) график будет аналогичным, только перегиб будет чуть меньше (штриховая линия на графике).

7.ЛАЧХ:
 , где
, где 
Асимптотическая ЛАЧХ колебательного звена:
Определяем наклон на втором участке:

Шаблон к графику а) дается от 0 до 1 шагом в 0,1.
Консервативное звено:
Структурная схема колебательного звена будет выглядеть следующим образом:
Примером колебательного звена является любая RLc- цепь.
Примером изодромного интегрирующего звена может служить гидравлический демпфер, к поршню которого присоединена пружина.
Звено чистого запаздывания
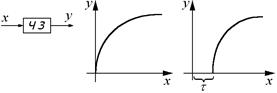
Звеном чистого запаздывания называется такое звено, выходная величина которого полностью повторяет входную величину, но со сдвигом во времени на величину t (время запаздывания).
 Динамика процесса описывается уравнением:
Динамика процесса описывается уравнением:
 ,
,
где t - длительность запаздывания.
1. Переходная характеристика:

2. Импульсная переходная характеристика:

3. Передаточная функция звена:

4. АФХ:

представляет собой окружность с центром в начале координат и радиусом, равным единице.
5. АЧХ:

6. ФЧХ:

 |
7. ЛАЧХ:

 Структурная схема:
Структурная схема:
Структурные схемы САУ
Для оценки точности, устойчивости и качества управления замкнутых систем необходимо знать их уравнения статики и динамики. Уравнение динамики замкнутой системы можно получить на основе совокупности уравнений отдельных элементов, образующих систему, путем последовательного исключения промежуточных переменных. Наиболее удобным для решения этой задачи объединения математических моделей элементов является метод структурных преобразований, согласно которому по структуре схемы с помощью нескольких простых правил находят ее общую (эквивалентную) передаточную функцию, а затем – соответствующее уравнение динамики.
Структурные схемы САУ - это графическое изображение САУ, где динамика процессов представлена в операторной форме в виде передаточных функций.
Взаимосвязь ТАУ с другими техническими науками
Кибернетика- наука об оптимальном управлении сложными системами (технические объекты, технологические процессы, живые организмы, коллективы, предприятия и др.). В кибернетике выделяется раздел технической кибернетики, как науки об управлении техническими объектами. В технической кибернетике выделяется теория информации – наука, занимающаяся сбором и обработкой информации, необходимой для управления техническими объектами и ТАУ.
Системой автоматического управления - называют совокупность управляемого объекта и автоматического управляющего устройства (регулятора), взаимодействующих между собой в соответствии с определенным алгоритмом управления.
САУ – это такая система, в которой управляющие функции выполняются автоматически, т.е. без участия человека.
АСУ (автоматизированная система управления) - это система, в которой часть управляющих функций выполняется автоматическими управляющими устройствами, а часть функций (наиболее важных и сложных) выполняется человеком.
Основные понятия и определения ТАУ
Автоматическое регулирование - это поддержание постоянной заданной величины, характеризующей состояние объекта управления или изменение этой величины по определенному заданному закону регулирования. При этом это поддержание осуществляется путем измерения управляемых величин объекта управления и выработкой управляющего воздействия на данный объект.
Автоматическое управление - это автоматическое выполнение ряда функций, обеспечивающих оптимальное функционирование системы с возможностью выбора из различных вариантов функционирования. При этом данные функции выполняются по алгоритмам, достигающим цель управления.
САР – система автоматического регулирования;
ТАР – теория автоматического регулирования;
САУ – система автоматического управления;
ТАУ – теория автоматического управления.
Основные характеристики ОУ
Объектом управления в ТАУ могут быть любые технические объекты, технологические процессы, а также более простые САУ. Любой объект характеризуется рядом величин, определяющих процессы в самом объекте, влияние внешней среды на объект, управляющие сигналы с регулятора.
Внешними воздействиями называют величины, влияющие на объект извне. Внешние воздействия бывают двух типов:
1. Управляющее воздействие (управляющий сигнал, управляющая входная величина) – это величина, характеризующая влияние регулятора на объект.
2. Возмущения-внешние воздействия, которые не управляют объектом, но оказывают влияние на функционирование объекта. Возмущения делятся на нагрузку – это внешние воздействия, обусловленные работой системы и помехи - вредное влияние внешней среды, обусловленное побочными явлениями в объекте.
Величины, характеризующие изменения в самом объекте, называются внутренними величинами или состоянием объекта. Среди них следует выделить управляемую величину, по наблюдениям за которой и вырабатывается управляющее воздействие регулятора.
- возмущение;
- управляющее воздействие;
- управляемая величина.
Примеры объектов управления
1.
у = Н - управляемая величина (уровень жидкости);
х = Q 1 - управляющее воздействие (приток жидкости);
z = Q 2 – нагрузка (расход жидкости).
Динамическая характеристика:
где S – площадь поперечного сечения резервуара.
Y = f ( X , Z , t ) – взаимосвязь всех координат.
Каждый объект характеризуется двумя характеристиками (режимами): статической и динамической.
Статическая характеристика (установившийся режим) – это характеристика, в которой постоянное входное воздействие Х и возмущение Z постоянны во времени, тогда управляемая величина Y = f ( X , Z ).
Статические характеристики бывают монотонные и экстремальные.
Частным случаем статической характеристики является квазистатическая характеристика, когда на вход подается гармоническое воздействие (sin), тогда в установившемся режиме тоже будет гармоническая величина.
Динамическая характеристика, когда управляемая величина Y не является постоянной во времени и описывается следующим уравнением: Y ( t ) = f ( X ( t ), Z ( t ), t ). Все переменные описываются системой обыкновенных дифференциальных уравнений (ОДУ), либо системой нелинейных дифференциальных уравнений (НДУ).
2. Электродвигатель постоянного тока.
Фд - магнитный поток двигателя;
i я - ток якоря двигателя;
U я - напряжение якоря двигателя;
R я - сопротивление якоря двигателя;
i в - ток обмотки возбуждения;
U в - напряжение обмотки возбуждения;
Мтр - момент трения, возникающий на валу двигателя;
w - частота вращения вала двигателя;
J - момент инерции механизма, приведенного к валу двигателя;
Мнагр - момент нагрузки на валу двигателя.
Запишем уравнения:
- динамические характеристики.
При статической характеристике все производные зануляются.
a 1 и c 1 -конструктивные параметры двигателя;
Фд - является нелинейной функцией от тока возбуждения;
Мтр - является нелинейной функцией от частоты вращения вала двигателя;
Управляющим воздействием является Х = U я ( U в ), управляемой величиной – У = w, нагрузка (внешнее воздействие) – Z = U в ( U я ), Мнагр, Мтр – помеха.
Дата: 2018-12-21, просмотров: 425.