В прошлом бесконтактные датчики расстояния выдавали информацию только лишь о наличии или отсутствии предмета перед датчиком в виде дискретного сигнала ON/OFF.
В наши дни датчики для измерения расстояния могут использовать различные принципы измерений: индуктивный, ультразвуковой или оптический, однако все они имеют электрический выходной сигнал, величина которого пропорциональна расстоянию до измеряемого объекта.
В таблице 1 представлены основные типы аналоговых бесконтактных датчиков для измерения расстояний и их основные особенности.
Таблица 2. Характеристики различных датчиков расстояния

Индуктивные датчики. Индуктивные датчики расстояния определяют расстояния до проводящих металлических объектов, таких как сталь, алюминий, латунь. Поскольку принцип работы индуктивных датчиков основан на определении токов взаимной индукции, такие датчики очень устойчивы к воздействию неметаллических предметов и помех, таких как, например, пыль или машинное масло. Современные технологии позволяют создать индуктивный датчик с аналоговым выходом имеющей диаметр всего 6 мм и измеряемое расстояние 2 мм. Такие датчики с высоким разрешением и быстрым временем отклика находят применение в большинстве высокоскоростных задач.
Емкостные датчики. Принцип действия основан на изменении электрического поля, генерируемого датчиком, при появлении объекта в зоне его чувствительности. В отличии от индуктивных, емкостные датчики реагируют на предметы из любого материала. Емкостные датчики используют для контроля заполнения бутылки (сквозь ее стенку), контроль сыпучих и жидких материалов в бункерах и емкостях, контроль разрыва/провисания ленты и т.п. Необходимо отметить, что в описаниях к изделиям указывается номинальное расстояние срабатывания, измеренное на заземленный лист стали. Если объект выполнен из другого материала, то необходимо пользоваться таблицей поправочных коэффициентов (коэффициент, как правило, меньше единицы и сильно зависит от наличия влаги в материале). Максимальное расстояние срабатывания составляет около 50 мм.
Емкостные датчики обладают высокой надежностью, в них отсутствует эффект «тяжения», трения. Отрицательными качествами является нелинейность, сложность обработки сигналов и низкая точность.
Ультразвуковые датчики. Общий принцип действия ультразвуковых датчиков расстояния основан на излучении импульсов ультразвука и измерении, пока звуковой импульс, отразившись от объекта измерения, вернется обратно в датчик. При этом достигается разрешения до 0,2 мм.
Благодаря тому, что пьезорезистивный преобразователь может служить как излучателем, так и приемником ультразвуковых импульсов, появляется возможность создать ультразвуковые датчики расстояния с одним преобразователем. Такой преобразователь сначала излучает короткий ультразвуковой импульс. Одновременно с этим, в датчике запускается внутренний таймер. Когда отраженный от объекта ультразвуковой импульс вернется обратно в датчик, таймер останавливается. Время, прошедшее между моментом излучения импульса и моментом, когда отраженный импульс вернулся в датчик, служит основой для вычисления расстояния до объекта. Полный контроль за процессом измерения производится с помощью микропроцессора, обеспечивающего высокую линейность измерений. Наиболее важными особенностями применений ультразвуковых датчиков служит их возможность измерять расстояния до таких сложных объектов таких как, например, сыпучие вещества, жидкости, гранулы, прозрачные или напротив сильно отражающие поверхности. В дополнение ультразвуковыми датчиками можно измерять сравнительно большие расстояния, при этом, сохраняя их небольшие размеры, что может быть существенно для ряда применений.
Более простой способ использования ультразвуковых датчиков состоит в приеме уже сгенерированного «маяком» ультразвукового сигнала. В этом случае нет необходимости сначала излучать короткий ультразвуковой импульс, а расстояние до наблюдаемого объекта измеряется путем анализа амплитуды пришедшего сигнала (подразумевается, что максимальная амплитуда сигнала, соответствующая нулевому расстоянию до объекта-маяка, известна). Пьезоэлектрический преобразователь воспринимает звуковую волну и преобразует ее в электрический сигнал.
Однако и ультразвуковые датчики имеют ряд ограничений. Прежде всего, это пена и другие объекты, сильно поглощающие ультразвуковые колебания. Такое поглощение сильно уменьшает измеряемую дистанцию. Сильно изогнутые поверхности так же снижают расстояние и точность измерений, поскольку рассеивают ультразвуковые колебания в различных направлениях. Ультразвуковые датчики излучают импульс в виде широкого конуса, что так же ограничивает возможность измерения расстояния до небольших объектов, увеличивая уровень помех от других объектов, которые так же могут находиться в поле зрения датчика. Некоторые ультразвуковые датчики имеют конус с углом всего 5 градусов. Это позволяет использовать их для измерения намного меньших объектов, например таких, как бутылки или ампулы.
Оптические датчики. Существует множество различных способов измерить расстояние до предмета с помощью оптики: например лазерные интерферометры, датчики с рассеянным отражением света и оптические датчики радарного типа. Каждый из видов датчиков имеет свои сильные и слабые стороны. Лазерные интерферометры имеют большой диапазон измерений и точность несколько нанометров, однако, эти приборы очень дорогие и сложные в эксплуатации. Датчики с рассеянным отражением и аналоговым выходом могут измерять расстояния в широких пределах, однако поскольку они работают с отраженным светом, то могут быть проблемы с измерением расстояний до окрашенных или отражающих объектов. Оптические датчики радарного типа, преимущественно лазерные, могут измерять большие расстояния, однако принцип их работы, основанный на измерении времени распространения света от датчика до объекта и обратно, позволяет измерять с ограниченным разрешением в 2 – 3 мм.
Подавляющее большинство задач по измерению в промышленности приходится на диапазоны от долей микрон до нескольких десятков метров. При этим датчики должны работать с объектами далекими от идеальных: малого размера, имеющих различный цвет, сложную структуру поверхности и перемещающихся с высокой скоростью. Для таких целей наиболее подходят лазерные датчики расстояния, работающие по принципу оптической триангуляции.
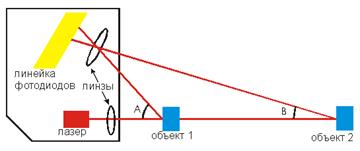
Рисунок 26. Принцип работы оптического датчика расстояния
На рисунке показан принцип работы оптического датчика расстояния. Лазер посылает через линзу луч, который отражается от объекта и фокусируется на линейке из фотодиодов, которая преобразует световой сигнал в электрический. Всякое изменение расстояния до объекта вызывает изменение угла отраженного луча и, следовательно, позиции, которую отраженный луч занимает на линейке фотодиодов. Микроконтроллер обрабатывает сигнал от линейки фотодиодов и преобразует его в аналоговый электрический сигнал.
Наиболее важное качество таких датчиков расстояния состоит в сочетании высокой точности измерения и больших измеряемых расстояниях. Большинство производителей предлагают датчики с разрешением от 1 мкм до 1мм. Однако высокая точность возможна только на относительно коротких расстояниях. Так что, например, точность в 1 мкм на расстояниях в 1 метр получить вряд ли удастся.
Для снижения влияния шумов все лазерные датчики расстояний позволяют проводить интегральные или усредненные измерения. При этом производится множество измерений расстояния до объекта и результат потом усредняется, тем самым повышается точность измерений. Однако большая точность требует большого количества измерений, увеличивая при этом общее время измерения. Так, например, что бы обеспечить точность в 1 мкм типичное время измерения составляет порядка 0,1 сек.
Вывод: Рассмотрев предложенные типы датчиков расстояния, остановимся на ультразвуковых датчиках, позволяющих определять расстояния до объектов на дистанциях до 10 метров, а также обладающих точным определением скорости передвижения объекта.
В разрабатываемой системе управления будем использовать датчик фирмы SICK UM30-15113. Он обладает следующими основными характеристиками:

Рисунок 27. Внешний вид выбранного датчика расстояния
· Максимальная дальность 8м;
· Выход: аналоговый 4-20 мA/0-10 В;
· Vпит. 12...30 В;
· корпус М30х1,5 - никелированная латунь, разъём М12, 4 контакта.
4.6 Обоснование и выбор схемы вычитания:
Схема вычитания предназначена для получения сигнала рассогласования между входами.
Схемотехнически она реализуется следующим образом:
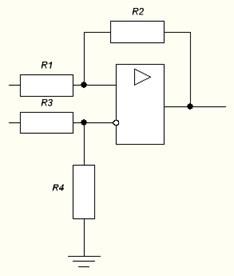
Рисунок 28. Схема вычитания


4.7 Обоснование и выбор схемы суммирования:
Схема суммирования предназначена для получения суммарного сигнала с двух входов. Схемотехнически она реализуется следующим образом:
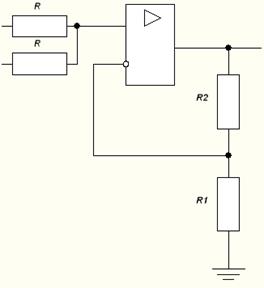
Рисунок 29. Схема суммирования

где n – число входов.
4.8 Обоснование и выбор регулятора:
Главная задача систем регулирования состоит в том, чтобы стабилизировать параметры процесса на заданном уровне при воздействии внешних возмущающих воздействий, действующих на объект управления. Этим занимаются системы автоматической стабилизации. Другой не менее важной задачей является задача обеспечения программного перехода на новые режимы работы. Решение этой проблемы осуществляется с помощью той же системы стабилизации, задание которой изменяется от программного задатчика.
К автоматическим системам регулирования предъявляются требования не только по устойчивости процессов регулирования во всем диапазоне нагрузок на объект, но и по обеспечению определенных качественных показателей процесса автоматического регулирования. Ими являются:
· Ошибка регулирования (статистическая или среднеквадратическая составляющие).
· Время регулирования.
· Перерегулирование.
· Показатель колебательности.
Наиболее широко применяются следующие виды регуляторов:
1. П-регулятор – это линейный усилитель (между выходом и входом прямая зависимость), фазовый сдвиг которого в частотном диапазоне входных воздействий пренебрежительно мал. Введение такого регулятора в систему дает статическую ошибку С0 (ошибка по координате), но в некоторых случаях позволяет сделать систему регулирования устойчивой.
2. ПИ-регулятор – регулятор, использующий пропорционально-интегральный закон регулирования. Использование такого регулятора в системе дает астатическую ошибку первого порядка С1, так называемую ошибку по скорости. При этом за счет интегрального закона регулирования статическая ошибка равна нулю.
3. ПИД-регулятор – основан на пропорционально – интегрально – дифференциальном законе регулирования системы. Как и ПИ-регулятор, ПИД обеспечивает астатическое регулирование. При этом С0 и С1 равны нулю, за счет использования трех звеньев. Данный вид регуляторов плавно уменьшает ошибку регулируемой величины в ходе своей работы. Полезным свойством данных регуляторов является возможность преобразования выходного сигнала в ШИМ.
Вывод: Для создания регулятора будем использовать ПИД-регулятор.
Разрабатываемую функциональную схему можно условно разделить на 3 блока:
- Блок управления скоростью вращения левого колеса
- Блок управления скоростью вращения правого колеса
- Блок определения расстояния и направления до объекта следования
Функциональная схема устройства представлена в приложении А.
В настоящее время происходит бурный рост цифровой техники. Повсеместно создается множество цифровых элементов, которые раньше можно было реализовать только в аналоговом варианте. Цифровые элементы более надежны, функциональны и обладают рядом достоинств:
1. Полностью отсутствует дрейф нуля;
2. Имеется возможность запоминания и коррекции измеряемых значений управляемых (скорость, ускорение, угол) и управляющих (ШИМ) величин;
3. Способны к многоконтурному управлению без наращивания аппаратуры;
4. Способны реализовать не только традиционные линейные законы управления, но и нелинейные.
Исходя из этого разрабатываемую систему управления будем проектировать как цифровую систему управления. В этом случае многие элементы функциональной схемы можно заменить одним – микроконтроллером.
Микроконтроллер – это устройство, включающее в себя ОЗУ, ПЗУ, способное выполнять заложенную в него программу. В зависимости от комплектации МК может иметь и АЦП, ШИМ-модулятор, и т.д.
Наиболее известными являются микроконтроллеры фирмы «Microchip». Их основные особенности это:
1. Достаточно низкая цена 2-10$;
2. Высокая надежность;
3. Развитая периферия;
4. Высокое быстродействие (выполнение команды составляет 100-200 нсек);
Данная фирма выпускает следующие серии микроконтроллеров:
· серия 12С5х – простейшие контроллеры (таймер, DIP8);
· серия 12С67х – простейшие контроллеры (таймер, АЦП, DIP8);
· серия 16С7х – самые распространенные и наиболее «напичканные» периферийными устройствами;
· серия 16С77х – с 12-ти битными АЦП;
· серия 16С78х – АЦП, ЦАП, операционный усилитель, компаратор;
· серия 16С64(66)х – с аналоговыми компараторами 16С7х;
· серия 16С8х – модернизированный вариант старой серии 16С5х;
· серия 16С9хх – имеет выход на ЖКИ;
· серия 17Схх – имеет встроенный умножитель чисел и ориентирована на выполнение математических операций;
· серия 16F87Х – аналог 16C7х но с Flash-памятью 10-ти битными АЦП;
· серия 16С8ххх – 10-ти битные АЦП, 40 МГц тактовая частота, 4 таймера.
При выборе микроконтроллера следует учесть, что сигналы с выходов датчиков будут подаваться в аналоговом виде. Значит, для их обработки необходим АЦП. Исходя из этого выберем серию 16F87x для использования в системе управления.
Список литературы
1. Сборник научных трудов «Мобильные робототехнические комплексы» – М.:ИФТП 1990г.
2. Библиотека электронных компонентов. Выпуск 3: Силовая электроника фирмы HARRIS – М. ДОДЭКА, 1999 г., 32 с.
3. Лекции по курсу “ Технология проектирования СУ ” Ерилов Ю.В.
4. Лекции по курсу “ Микропроцессорные устройства систем управления ” Морозов Б.А.
5. Лекции по курсу “ Микроконтроллеры ” Морозов Б.А.
Дата: 2019-12-10, просмотров: 362.