В соответствии с ТЗ выбираемый двигатель должен обладать следующими характеристиками:
1. Ток якоря электродвигателя на валу при максимальной нагрузке не должен превышать 10А;
2. Двигатель должен запитываться от одной аккумуляторной батареи 12В.
Двигатель – это электромеханический преобразователь, в котором осуществляется преобразование электрической энергии в механическую. В зависимости от рода потребляемого или отдаваемого в сеть тока двигатели подразделяются на двигатели переменного и постоянного тока. Двигатели переменного тока в свою очередь делятся на синхронные, асинхронные и коллекторные.
В синхронных двигателях поле возбуждения создается обмоткой, расположенной на роторе, которая питается постоянным током. Обмотка статора соединена с сетью переменного тока. В обычном исполнении вращающийся ротор с обмоткой возбуждения располагается внутри статора, а статор неподвижен. Управление синхронными двигателями осуществляется путем изменения частоты питающего напряжения, что недопустимо для нас. Синхронные двигатели также характеризуются большими угловыми скоростями и маленькими моментами. Поэтому часто такие двигатели используются в гироскопах.
В асинхронных двигателях специальная обмотка возбуждения отсутствует, рабочий поток создается реактивной составляющей тока обмотки статора. Этим объясняется простота конструкции и обслуживания асинхронных двигателей, так как отсутствуют скользящие контакты (щеточно-коллекторный узел) для подвода тока к вращающейся обмотке возбуждения и отпадает необходимость в дополнительном источнике постоянного тока для возбуждения двигателя. Недостатком является невозможность управления таким двигателем.
Среди коллекторных двигателей переменного тока получили распространение в основном однофазные двигатели малой мощности. Они находят применение в приводах, к которым подвод трехфазного или постоянного тока затруднен или нецелесообразен (в электрифицированном инструменте, бытовой технике и т. п.).
Использование двигателей переменного тока неприменимо для нашей системы, питающейся от аккумуляторов, т.к. для их использования придется устанавливать преобразователь постоянного напряжения в переменное.
Поэтому рассмотрим двигатели постоянного тока. Большинство двигателей постоянного тока — это коллекторные двигатели. Они выпускаются мощностью от долей ватта до нескольких тысяч киловатт. Обмотки возбуждения двигателей постоянного тока располагаются на главных полюсах, закрепленных на станине. Выводы секций обмотки ротора (якоря) впаяны в пластины коллектора.
Одна обмотка коллекторного двигателя постоянного тока представлена ниже:
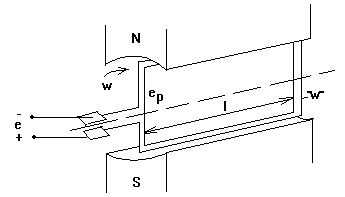
Рисунок 5. Вид одной обмотки коллекторного двигателя постоянного тока
Ток, протекая по обмотке, находящейся в магнитном поле, наводит в ней ЭДС, которая старается провернуть рамку. Направление этой силы определяется по правилу правой руки. Чтобы во внешней цепи ток протекал в одном направлении, он должен быть выпрямлен. Для этого служит специальный электромеханический выпрямитель – коллектор, расположенный на валу машины. В простейшем случае используют две пластины с наложенными на них щетками. Последние так должны быть расположены в пространстве, чтобы коммутация происходила в моменты периода ЭДС через ноль. С увеличением количества рамок (секций) и соответственно пластин коллектора пульсации уменьшаются. При восьми коллекторных пластинах пульсация напряжения на щетках не превышает 1% от среднего, поэтому ток, протекающий во внешней цепи, можно считать практически постоянным.
Коллекторный двигатель постоянного тока обычно управляется при помощи Н-моста, позволяющего задавать направление вращения:
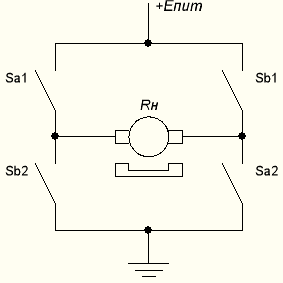
Рисунок 6. Н-мост
Для того, чтобы двигатель вращался вперед ключи Sa1 и Sa2, обозначенные на рисунке, должны быть замкнуты. Если необходимо вращение в обратную сторону, что замыкаются ключи Sb1 и Sb2, а Sa1 и Sa2 при этом должны быть разомкнуты.
Как видно, коллекторный двигатель постоянного тока прост в управлении. Но при этом обладает меньшим КПД, т.к. в единичный момент времени «полноценно работает» только 1 обмотка, а наличие щеточно-коллекторного узла приводит к искрению, стиранию контактов, что является причиной невысокой (по сравнению с другими двигателями) долговечностью.
Существуют также бесконтактные двигатели постоянного тока, которые лишены недостатка коллекторных ДПТ, но имеют более сложную схему управления. Рассмотрим принцип действия такого двигателя:
В первоначальный момент времени по обмоткам A, B, C протекают токи так, как указано на рисунке. Намагничивающая сила FR взаимодействует с потоком постоянного магнита ротора. Возникает вращающий момент, и двигатель приходит во вращение.
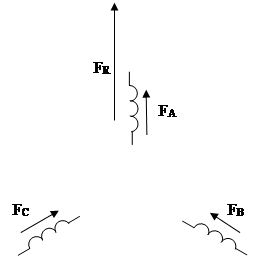 |

Рисунок 7. Положение ротора в начальный момент времени
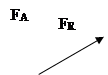
Затем происходит смена токов в обмотке и FR изменяет свое направление. Ротор продолжает свое вращение, стремясь совместиться с результирующим вектором.


 |


|
|



Рисунок 8. Положение ротора с течением времени
Последовательная смена подаваемых токов на обмотках заставляет вращаться ротор в выбранном направлении. Для более плавного изменения направления вектора FR используют модуляцию.
Схема управления бесконтактным двигателем постоянного тока выглядит следующим образом:
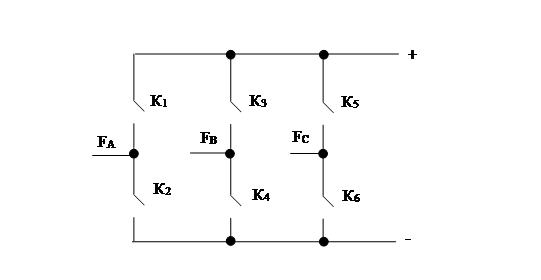
Рисунок 9. Схема управления бесконтактным двигателем постоянного тока
В качестве элемента, отслеживающего положение ротора, обычно используют датчик поворота ротора, который жестко соединен с ротором.
Схема управления таким двигателем сложнее. Однако, это компенсируется высоким КПД двигателя (все 3 обмотки всегда активны), отсутствием щеточно-коллекторного узла (нет искрения, высокая долговечность элементов).
Подведем итог: конструкция двигателей постоянного тока более сложная, стоимость выше и эксплуатация более дорогая, чем асинхронных, поэтому двигатели постоянного тока применяются в приводах, требующих широкого и плавного регулирования частоты вращения, или в автономных установках при питании двигателей от аккумуляторных батарей.
Выбор исполнительного двигателя должен соответствовать поставленным требованиям технического задания:
1. Основное назначение электродвигателя.
2. Тип и параметры источника питания.
3. Конструктивные особенности и массогабаритные показатели двигателя.
4. Тип системы управления двигателем.
5. Условия окружающей среды, в которой предстоит работать.
6. Ориентировочная мощность на валу двигателя, КПД двигателя.
7. Требования по надежности, работе на отказ, возможности проведения планового технического осмотра.
8. Стоимость и эксплуатационные расходы.
Вывод: Использование двигателей переменного тока не представляется возможным, т.к. разрабатываемая система относится к классу бортовых систем. Выбор электродвигателя переменного тока потребует использования дополнительного источника переменного напряжения.
Двигатель постоянного тока лишен этого недостатка – в качестве источника питания для него можно использовать аккумуляторную батарею и генератор постоянного тока, что удовлетворяет условиям технического задания.
Поэтому в качестве желаемого двигателя можно использовать бесконтактный двигатель постоянного тока.
Однако, как уже упоминалось выше, сложная схема управления данным классом двигателей накладывает дополнительные требования к разработке схемы управления.
В связи с тем, что курсовой проект является учебным, по согласованию с руководителем целесообразно использовать коллекторный двигатель постоянного тока с независимым возбуждением. Поставленным требованиям удовлетворяет планетарный мотор-редуктор King Right Motor PT7152 с двигателем постоянного тока. Характеристики электродвигателя:
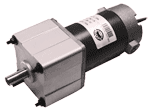
Рисунок 10. Внешний вид выбранного двигателя
· Мощность - 120Вт
· Напряжение питания - 12В
· Скорость холостого хода - 2200 Об/мин
· Номинальная скорость - 1600 Об/мин
· Номинальный ток - 10А
· Крутящий момент двигателя (без редуктора) - 5,4 кг*см
Таблица 1. Характеристики планетарных мотор-редукторов PT7152

| Передаточное число редуктора |
| 30 |
| 60 |
| 90 |
|
| Крутящий момент на выходе, кг•см | 137,7 | 259,2 | 340,2 | |||||
| Скорость на выходе, об/мин | 53,3 | 26,7 | 17,8 | |||||
| Скорость без нагрузки, об/мин | 73,3 | 36,7 | 24,4 | |||||
| КПД | 0.85 | 0.8 | 0.7 | |||||
| Длина редуктора, мм | 65 | |||||||
4.2 Обоснование и выбор усилителя мощности:
Управление исполнительным органом осуществляется путем подачи на него сигнала рассогласования. Однако почти всегда величина сигнала рассогласования слишком мала для восприятия исполнительным элементом. Чтобы усилить ее используются усилители. Существует множество типов усилителей: релейные, электромагнитные, магнитные, полупроводниковые.
Все они обладают как положительными, так и отрицательными сторонами.
Релейное усиление обеспечивает хороший коэффициент усиления U, I, P. Имеет высокое КПД за счет низкого сопротивления контактов; имеет идеальную изоляцию между источником сигнала и нагрузкой. Но в момент коммутации происходит искрение, разрушающее контакты. Это приводит к низкой надежности и малому быстродействию. К тому же системам управления при использовании реле свойственно колебание.
Полупроводниковые усилители обладают высоким быстродействием. Их отрицательная сторона – остаточное напряжение 0.3В
С целью устранения недостатков релейных усилителей используются линейные усилители и усилители с импульсной модуляцией. Рассмотрим принцип действия линейного усилителя:
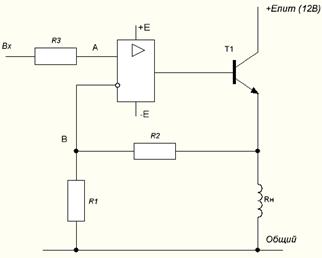
Рисунок 11. Линейный усилитель
Коэффициент усиления такой схемы равен:
 (1)
(1)
Для определения необходимого коэффициента усиления по току и по напряжению необходимо выбрать интерфейс, который будет использоваться в разрабатываемой системе.
Существует 4 основных предела изменения абсолютных значений сигналов напряжения постоянного тока:
· От -5В до +5В
· От 0В до +5В
· От 0В до +10В
· От -10В до +10В
Так как в разрабатываемой системе предполагается использовать микроконтроллер, который работает с диапазоном напряжений от 0 до +5В, логично выбрать именно такой интерфейс. Выбранный двигатель работает от напряжения 12В, максимальный выход с микроконтроллера – 5В. Следовательно, коэффициент усиления по напряжению разрабатываемого усилителя должен быть 12 / 5 = 2.4.
Теперь определимся с коэффициентом усиления по току. Пределов изменения силы тока сигналов постоянного тока также четыре:
· От 0А до +5мА
· От -5мА до +5мА
· От 0А до +20мА
· От 4мА до +20мА
Максимальный ток на выходе микроконтроллера составляет 25мА. Минимальный – 0мА. Наиболее близкий интерфейс – от 0А до +20мА. Его и будем использовать в разрабатываемой системе.
Теперь, зная необходимый коэффициент усиления и подставив его в формулу (1), получаем:

Элементы R2 и R1 выбирают по таблицам рядов с учетом рекомендуемых значений не выше 1МОм. Это обусловлено тем, что для правильной работы операционного усилителя (ОУ) на его входах должны быть одинаковые потенциалы (у идеального ОУ; у реальных ОУ величина разности Uсм обычно равна 0.35мВ).
Падение напряжения в точке B равно:

Поэтому чтобы на первом входе (точка А) был такой же потенциал, R3 берут равным по номиналу параллельному включению R1 и R2. Однако, при изменении температуры суммарное сопротивление группы R1, R2 будет изменяться по другому, чем у резистора R3. И если брать очень большие величины сопротивлений данное различие в температурных коэффициентах очень быстро приведет к высокой разности входных потенциалов на входах ОУ и он выйдет в нерабочий режим – насыщение.
Рассчитаем коэффициент  , который должен иметь выбираемый транзистор для обеспечения тока 10А на выходе схемы (в соответствии с выбранным двигателем).
, который должен иметь выбираемый транзистор для обеспечения тока 10А на выходе схемы (в соответствии с выбранным двигателем).
Максимальный ток на выходе ОУ составляет 3мА. Этот ток является током базы транзистора. А т.к. есть ток базы, то появляется ток коллектора, который равен  * Iб. Отсюда мы можем найти интересующий нас коэффициент:
* Iб. Отсюда мы можем найти интересующий нас коэффициент:
=  =
=  =
= 
Ни один транзистор не обладает таким коэффициентом усиления по току. Поэтому используются составные транзисторы, которые позволяют увеличить за счет того, что суммарная = 1 * 2 * 3. Электрическая схема такой группы представлена ниже:
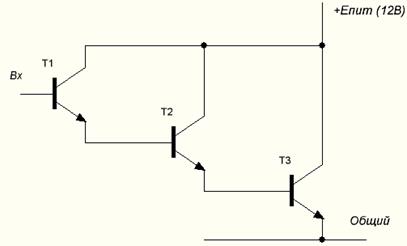
Рисунок 12. Схема усиления на составных транзисторах
Входной ток является током базы транзистора Т1. Т.к. существует ток базы у 1го транзистора появляется ток коллектора 1го транзистора, который является достаточным током базы для 2го транзистора. Под действием тока базы Iб2 второй транзистор открывается и появляется Ik2, который является током базы для 3го транзистора. Через транзистор Т3 начинает протекать Ik3.
Коэффициент у третьего транзистора невысок, порядка 10, т.к. это высокомощный транзистор. У Т2 этот коэффициент меньше – порядка 40. Т1 имеет самый большой коэффициент = 100. Таким образом общий коэффициент усиления данного каскада транзисторов составляет 40000, что является достаточным для нашего случая. Однако, данная схема обладает существенным недостатком – высоким падением напряжения, равным 2.1В
Для уменьшения потерей используется схема Шиклая:
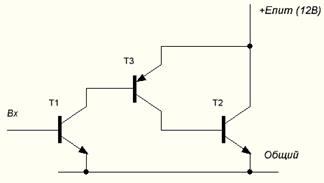
Рисунок 13. Схема Шиклая
Входной ток, протекая через базу транзистора Т1 открывает его. Возникает ток коллектора Iк1, который является током базы для n-p-n транзистора Т3. В нем возникает ток коллектора, который протекает через базу второго транзистора. Под действием этого тока он открывается и в нем возникает ток коллектора Ik2. Общий коэффициент усиления схемы также составляет 40000, но уже при меньшем падении напряжения (1В).
Режим реверса реализуется с введением второго транзистора (n-p-n), показанного на схеме ниже:
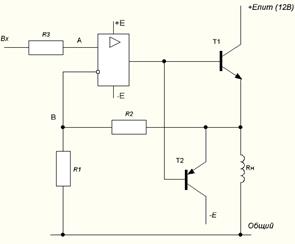
Рисунок 14. Схема с режимом реверса
Ток, протекая через базу транзистора Т2 открывает его и возникает Ik2.
Для исключения влияния температурного фактора на разрабатываемую схему вместо управления двигателем по напряжению будем использовать управление двигателем по току. Для этого в цепь включается прецизионный по температуре резистор очень небольшого сопротивления 0.01 Ом. В этом случае при изменении температуры сопротивление резистора изменится незначительно, что как раз и дает устойчивость системы к температурному фактору. Падение напряжения на резисторе составляет:
Uпал = 0.01Ом * 10А = 0.1В
Это очень малая величина, которая не сказывается на КПД двигателя.
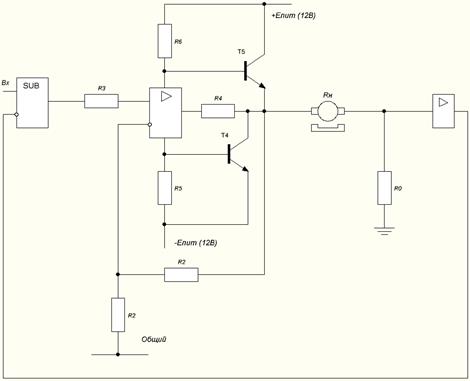
Рисунок 15. Схема управления двигателем по току
Рассчитаем необходимый коэффициент усиления в цепи обратной связи:

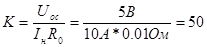
Мощность, рассеиваемую на транзисторе, можно найти по формуле:


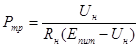
Построим график зависимости рассеиваемой мощности Pтр от напряжения нагрузки Uн:
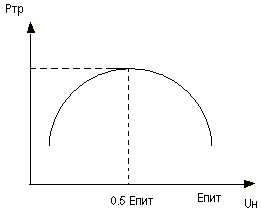
Рисунок 16. График рассеиваемой мощности
Из графика видно, что максимум рассеиваемой мощности приходится на напряжение ½ Eпит на нагрузке. Следует учитывать, что для отвода 10 Вт рассеиваемой мощности необходимо пространство объемом 1 литр.
Так как двигатель обладает высокой постоянной времени, то он будет продолжать вращаться еще некоторое время после снятия питания. Это свойство используют в импульсных схемах, где напряжение на нагрузку подается не постоянно, а импульсами. Двигатель в этом случае работает в так называем квазилинейном режиме.
Существует множество видов модуляции. Наиболее известные это:
1. Широтно-импульсная модуляция (ШИМ)
2. Частотно-импульсная модуляция (ЧИМ)
3. Амплитудно-импульсная модуляция (АИМ)
4. Импульсная модуляция (ИМ)
ШИМ:
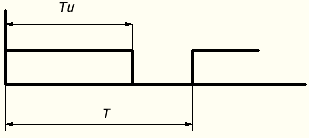
Рисунок 17. Внешний вид широтно-импульсной модуляции
При ШИМ период следования импульсов Т постоянен, изменяется ширина импульса Tи.
ЧИМ:
Рисунок 18. Внешний вид частотно-импульсной модуляции
Ширина импульса постоянна, различна частота их следования.
Модуляция позволяет снизить энергозатраты, что приводит к увеличению КПД. Также т.к. через транзистор не всегда течет ток, на нем меньше рассеивается мощности.
Выбираем ШИМ как наиболее простой в реализации вид модуляции – реализуется при помощи генератора пилообразного напряжения и компоратора.
Преобразуем исходную схему линейного усилителя в импульсную:
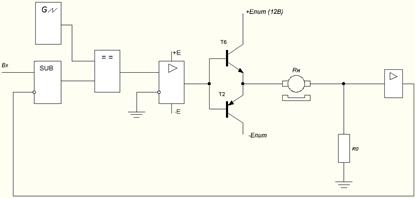
Рисунок 19. Импульсная схема усилителя
В разрабатываемой системе нет отрицательного источника питания, поэтому модернизируем исходную схему, избавившись от отрицательного источника питания:
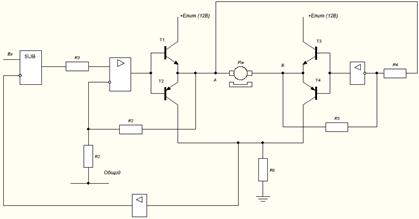
Рисунок 20. Импульсная схема усилителя с одним источником питания
В представленной схеме для того, чтобы двигатель вращался в одну сторону в точке А создается потенциал +12В, а в точке B 0В. Для вращения двигателя в другую сторону данные потенциалы меняются местами. Если же необходимо, чтобы двигатель не вращался в обоих точках задается потенциал равный +6В.
Вывод : Окончательная импульсная схема управления двигателем с использованием одного источника питания +12В и Н-моста:
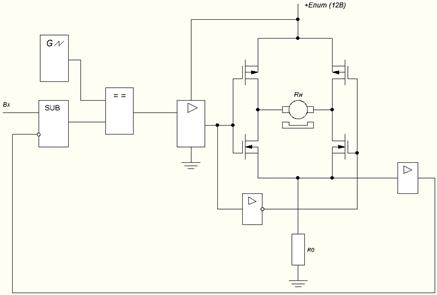
Рисунок 21. Импульсная схема управления на КМОП-транзисторах
В схеме используются КМОП транзисторы как имеющие меньшее падение напряжения.
В разрабатываемой схеме будем использовать усилитель фирмы APEX Microtechnology SA60. Его основные характеристики:
· Рабочая частота – 500 кГц;
· Полномостовой выход 0,1-80 В;
· Выходной ток – 10 А;
· Занимаемая площадь – 1 кв. дюйм;
· Герметичный и удароустойчивый корпус.
4.3 Обоснование и выбор датчика угловой скорости:
Для осуществления обратной связи в цепи управления двигателем по скорости вращения вала двигателя необходим датчик угловой скорости.
К датчикам предъявляются следующие требования:
· Линейность
· Чувствительность (разрешающая способность)
· Стабильность характеристик во времени, температуре, давлении, влажности
· Устойчивость к химическим, физическим воздействиям и т.д.
· Технологичность
Все датчики можно разделить на контактные и бесконтактные. Контактные не подходят для разрабатываемой схемы, т.к. у них низкая надежность и срок службы. Гораздо эффективнее использовать бесконтактные датчики. Они бывают следующего исполнения:
1. Резистивные:

где  - плотность материала, l – длинна, а S – площадь поперечного сечения.
- плотность материала, l – длинна, а S – площадь поперечного сечения.
Положительными качествами таких датчиков являются простота, доступность и высокая чувствительность. Отрицательными – низкая надежность (трущиеся материалы), влияние механических воздействий («ступеньки») при переключении, низкая линейность, большой начальный момент трогания.
2. Емкостные:

где S – это площадь, d – расстояние между обкладками
Данная группа датчиков обладает отсутствием трения, «тяжения» и высокой надежностью. Однако, их недостатками является нелинейность, сложность обработки сигналов, низкая точность.
3. Индуктивные – измеряется магнитное поле, которое создается током, протекающим по проводнику.

Такие датчики ценят за простоту конструкции, высокую точность, линейность и надежность. Но у них есть ряд отрицательных качеств: сложность обработки сигнала, большие масса-габаритные показатели и наличие «тяжения».
Существует также множество видов других датчиков.
Наиболее часто в автоматических системах применяют тахогенераторы постоянного и переменного тока, электромагнитные датчики и опто-электрические датчики.
Тахогенераторы представляют собой электрические генераторы небольшой мощности для преобразования частоты вращения в электрический сигнал. Выходное напряжение может достигать 50 В, нелинейность характеристики – не более 2%. Недостатком являются более низкая точность, большие массогабаритные показатели и стоимость. Зато на выходе такого датчика напряжение.
Магнитные датчики содержат установленную на вал двигателя шестеренку из ферромагнитного материала, рядом с которой крепится магнитная головка. При вращении шестеренки на выводах головки появляется переменное напряжение с частотой, равной частоте вращения двигателя, умноженной на количество зубьев на шестеренке.
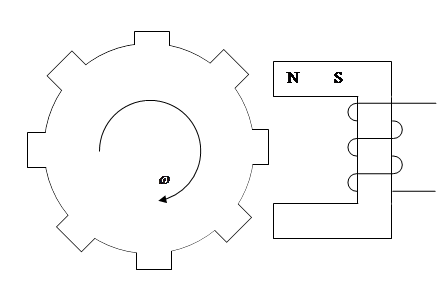
Рисунок 22. Магнитный датчик
Оптоэлектрический датчик (фотоэлектрический преобразователь вращения) включает в себя оптопару, световой поток которой прерывается диском с отверстиями, который насаживается на вал двигателя. Диск с отверстиями прерывает световой поток, и на выходе оптопары формируются импульсы с частотой вращения двигателя, умноженной на количество прорезей в диске.
Для данной системы предпочтителен магнитный датчик, в связи с надежностью и более высоким ресурсом в агрессивной среде. В соответствии с этим выберем магнитный датчик Pepperl+Fuchs серии MBF32. Он обладает следующими характеристиками:
· Гарантированная зона реагирования: 0…35, 0…48,6, 0…60 мм
· 2-, 3-проводная схема подключения
· Частота срабатывания: 400, 1000 Гц
· Тип выхода: PNP, NAMUR (нормально разомкнутый)
· Напряжение питания: 10…30 В, 8 В для датчиков с выходом NAMUR
· Степень защиты IP67
· Диапазон рабочих температур -25…+70°С
4.4 Обоснование и выбор преобразователя для датчика угловой скорости:
Для того, чтобы в дальнейшем использовать данные с датчика угловой скорости необходимо их преобразовать к номинальным значениям.
Сначала необходимо усилить очень слабый сигнал с выхода датчика. Для этого используем схему неинвертирующего усилителя:
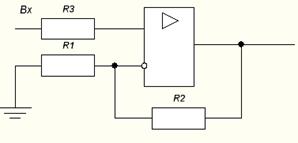
Рисунок 23. Схема неинвертирующего усилителя
Сигнал подается на прямой вход.
При этом коэффициент усиления определяется отрицательной обратной связью:

Далее в схеме ставится компаратор-детектор нулевого уровня с подачей сигнала на прямой вход.
На его выходе будет «+1» если входное напряжение больше нуля, и 0 если напряжение меньше нуля. Таким образом после компаратора мы получим сигнал следующего вида:
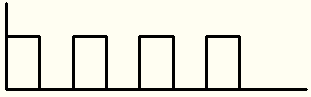
Рисунок 24. Внешний вид сигнала на выходе компаратора
Осталось только измерить количество данных импульсов в единицу времени.
Для этого используется генератор временных интервалов совместно с логическим элементом «И». Затем сигнал подается на счетчик.
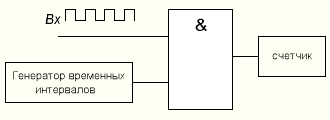
Рисунок 25. Схема подсчета количества импульсов
Чем выше скорость вращения вала, на котором сидит шестеренка, тем с большей частотой наводится сигнал на датчике.
Тем большее количество импульсов попадет в заданный временной интервал и соответственно будет сосчитано счетчиком.
Дата: 2019-12-10, просмотров: 370.