3. Вицын Н. «Современные тенденции развития систем автоматизированного проектирования в области электроники» // Chip News, № 1, 1997. С. 12–15.
4. Губанов Д. А., Стешенко В. Б., Храпов В. Ю., Шипулин С. Н. «Перспективы реализации алгоритмов цифровой фильтрации на основе ПЛИС фирмы ALTERA» // Chip News, № 9–10, 1997, с. 26–33.
5. Тех. Док. «One Technology Way, P.O. Box9106, Norwood, MA 02062-9106, U.S.A.», http://www.analog.com
6. LCD Controller/Driver LSI. Data Book. © 1994 Hitachi America Ltd.
7. «Алфавитно-цифровые индицирующие ЖК-модули фирмы Powertip.» Каталог, 1-е издание, © 1998 КТЦ-МК.
8. Микросхема: СЕ110. Техническое описание, 1-е издание, © 1997 КТЦ-МК,
9. Микросхема: DB-CE110. Техническое описание, 1-е издание, © 1997 КТЦ-МК.
10. Тех. Док.«MC78TXX», Fairchild Semiconductor Corporation, 2002, http://www.fairchildsemi.com
11. Тех. Док. «LMS1585A», National Semiconductor Corporation, April, 2000, http://www.national.com, Email: europ.support@nsc.com
12. Тех. Док. «ByteBlasterMV Parallel Port Download Cable» Altera Corporation, July, 2002, Version 3.3
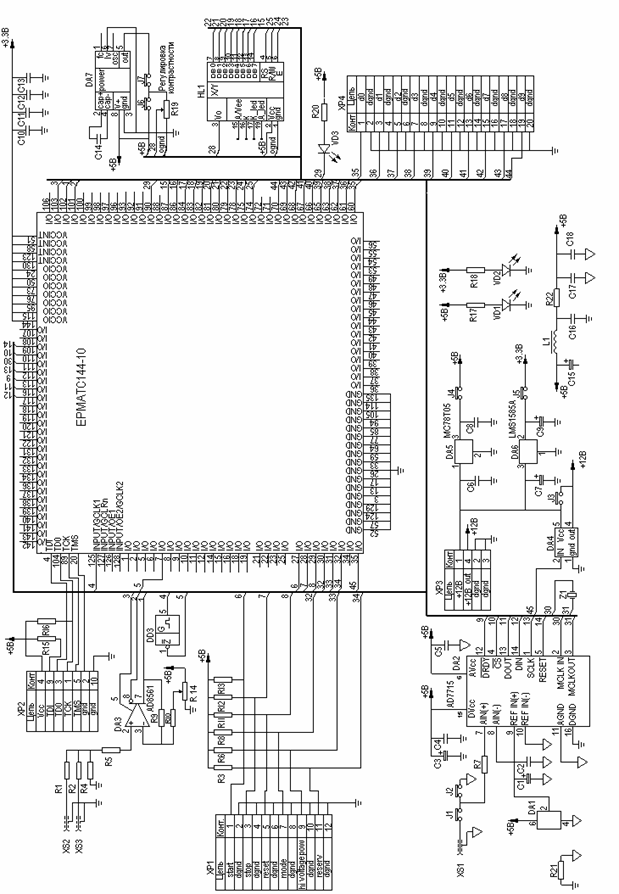
Приложение 1 (Принципиальная схема устройства)
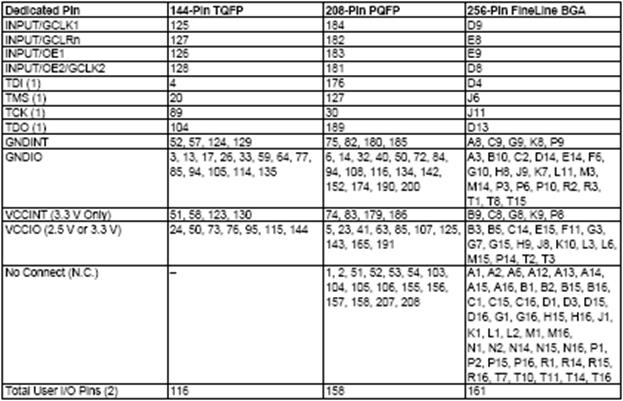
Приложение 2 (Список портов ввода вывода ПЛИС epm 3256a)
Приложение 3 (Текст программы)
--Антидребезговая система
INCLUDE "LPM_COUNTER";
CONSTANT DELAY = 6;
SUBDESIGN ANTIBOUNCE
(
IN : INPUT;
CLK : INPUT;
OUT : OUTPUT;
)
VARIABLE
CT : LPM_COUNTER WITH(LPM_WIDTH=DELAY);
TRIG : DFF;
BEGIN
TRIG.D = !IN;
CT.ACLR = !(!IN $ TRIG.Q);
CT.CLOCK = CLK;
TRIG.CLK=CT.Q[DELAY-1];
OUT = !TRIG.Q;
END;
--Десятичнодвоичный счетчик
CONSTANT DIGITS = 6;
INCLUDE "LPM_COUNTER";
SUBDESIGN COUNTER10
(
-- входные данные
CLOCK : INPUT;
ACLR : INPUT;
COUNT_ENA : INPUT;
-- выход
Q[DIGITS-1..0][3..0] : OUTPUT;
)
VARIABLE
RESET[DIGITS-1..0] : NODE;
COUNTER[DIGITS-1..0] : LPM_COUNTER WITH (LPM_WIDTH=4);
BEGIN
IF COUNTER[0].Q[3..0]==B"1010" THEN RESET[0]=vcc; ELSE RESET[0]=gnd; END IF;
IF COUNTER[1].Q[3..0]==B"1010" THEN RESET[1]=vcc; ELSE RESET[1]=gnd; END IF;
IF COUNTER[2].Q[3..0]==B"1010" THEN RESET[2]=vcc; ELSE RESET[2]=gnd; END IF;
IF COUNTER[3].Q[3..0]==B"1010" THEN RESET[3]=vcc; ELSE RESET[3]=gnd; END IF;
IF COUNTER[4].Q[3..0]==B"1010" THEN RESET[4]=vcc; ELSE RESET[4]=gnd; END IF;
IF COUNTER[5].Q[3..0]==B"1010" THEN RESET[5]=vcc; ELSE RESET[5]=gnd; END IF;
COUNTER[0].clock=clock;
COUNTER[DIGITS-1..1].clock=RESET[DIGITS-2..0];
Q[DIGITS-1..0][3..0]=COUNTER[DIGITS-1..0].Q[3..0];
COUNTER[DIGITS-1..0].aclr=RESET[DIGITS-1..0]#aclr;
COUNTER[0].cnt_en=COUNT_ENA;
END;
--Устройство управления индикатором
CONSTANT DATA_WITH = 8;
INCLUDE "LPM_COUNTER";
SUBDESIGN WH1602
(
CLK : INPUT;
IN[5..0][DATA_WITH-1..0] : INPUT;
D[DATA_WITH-1..0] : BIDIR;
E : OUTPUT;
RW : OUTPUT;
RS : OUTPUT;
)
VARIABLE
clk_a : NODE;
Ddff[DATA_WITH-1..0] : dff;
Din[DATA_WITH-1..0] : dff;
Dmsh[DATA_WITH-1..0] : NODE;
_RW : NODE;
_RS : NODE;
Eena : NODE;
Pause : LPM_COUNTER WITH (LPM_WIDTH=9);
STR : LPM_COUNTER WITH (LPM_WIDTH=4);
LINE[DATA_WITH-1..0] : NODE;
ST : MACHINE
WITH STATES ( z0, p1, r1, p2, r2, p3, r3, p4,
r4, b4, c4, r5, b5, c5, r6, b6, c6, r7, b7, c7, r8, b8, c8,
ds, bs, cs, dz0, bz0, cz0, dz1, bz1, cz1 );
Dtri[DATA_WITH-1..0] : TRI;
OE : NODE;
INC[3..0] : NODE;
INBUF[5..0][DATA_WITH-1..0] : DFF;
READ : DFF;
BEGIN
clk_a = dff(!clk_a, clk, vcc, vcc);
Pause.clock = clk_a;
-- outputs
Ddff[DATA_WITH-1..0].d = Dmsh[DATA_WITH-1..0];
Ddff[DATA_WITH-1..0].clk = !clk_a;
Dtri[DATA_WITH-1..0].in = Ddff[DATA_WITH-1..0].q;
D[DATA_WITH-1..0] = Dtri[DATA_WITH-1..0].out;
Din[DATA_WITH-1..0].d = D[DATA_WITH-1..0];
Din[DATA_WITH-1..0].clk = !dff (clk_a & Eena , clk, vcc, vcc);
Dtri[DATA_WITH-1..0].oe = dff (OE, !clk_a, vcc, vcc);
RW = dff (_RW, !clk_a, vcc, vcc);
RS = dff (_RS, !clk_a, vcc, vcc);
E = dff (clk_a & Eena , clk, vcc, vcc);
-- machine
ST.clk = clk_a;
CASE ST IS
WHEN z0 =>
Dmsh[DATA_WITH-1..0] = H"FF"; OE = vcc;
Eena = gnd; _RW = gnd; _RS = gnd; Pause.aclr = vcc;
ST = p1;
-- загрузка индикатора после включения питания
-- пауза перед включением 21мс
WHEN p1 =>
Dmsh[DATA_WITH-1..0] = H"38"; OE = vcc;
Eena = gnd; _RW = gnd; _RS = gnd; Pause.aclr = gnd;
IF Pause.q[]==200 THEN ST = r1; ELSE ST = p1; END IF;
-- INITIAL SETTING ONCE 00111000
WHEN r1 =>
Dmsh[DATA_WITH-1..0] = H"38"; OE = vcc;
Eena = vcc; _RW = gnd; _RS = gnd; Pause.aclr = vcc;
ST = p2;
-- пауза 7 мс > 4.1 мс
WHEN p2 =>
Dmsh[DATA_WITH-1..0] = H"38"; OE = vcc;
Eena = gnd; _RW = gnd; _RS = gnd; Pause.aclr = gnd;
IF Pause.q[]==100 THEN ST = r2; ELSE ST = p2; END IF;
-- INITIAL SETTING TWICE 00111000
WHEN r2 =>
Dmsh[DATA_WITH-1..0] = H"38"; OE = vcc;
Eena = vcc; _RW = gnd; _RS = gnd; Pause.aclr = vcc;
ST = p3;
-- пауза 0.7 мс > 0.1 мс
WHEN p3 =>
Dmsh[DATA_WITH-1..0] = H"38"; OE = vcc;
Eena = gnd; _RW = gnd; _RS = gnd; Pause.aclr = gnd;
IF Pause.q[]==10 THEN ST = r3; ELSE ST = p3; END IF;
-- INITIAL SETTING THIRD 00111000
WHEN r3 =>
Dmsh[DATA_WITH-1..0] = H"38"; OE = vcc;
Eena = vcc; _RW = gnd; _RS = gnd; Pause.aclr = vcc;
ST = p4;
-- пауза 0.7 мс > 0.1 мс
WHEN p4 =>
Dmsh[DATA_WITH-1..0] = H"38"; OE = vcc;
Eena = gnd; _RW = gnd; _RS = gnd; Pause.aclr = gnd;
IF Pause.q[]==10 THEN ST = r4; ELSE ST = p4; END IF;
-- Function Set 0011NF**
WHEN r4 =>
Dmsh[DATA_WITH-1..0] = H"3C"; OE = vcc;
Eena = vcc; _RW = gnd; _RS = gnd; Pause.aclr = vcc;
ST = b4;
WHEN b4 =>
Dmsh[DATA_WITH-1..0] = H"00"; OE = gnd;
Eena = vcc; _RW = vcc; _RS = gnd; Pause.aclr = vcc;
ST = c4;
WHEN c4 =>
Dmsh[DATA_WITH-1..0] = H"00"; OE = gnd;
Eena = gnd; _RW = vcc; _RS = gnd; Pause.aclr = gnd;
IF Din[DATA_WITH-1].q==0 THEN ST = r5; ELSE ST = b4; END IF;
-- Display ON/OFF = 00001DCB, Display ON,Cursor&Blink OFF
WHEN r5 =>
Dmsh[DATA_WITH-1..0] = H"0C"; OE = vcc;
Eena = vcc; _RW = gnd; _RS = gnd; Pause.aclr = vcc;
ST = b5;
WHEN b5 =>
Dmsh[DATA_WITH-1..0] = H"00"; OE = gnd;
Eena = vcc; _RW = vcc; _RS = gnd; Pause.aclr = vcc;
ST = c5;
WHEN c5 =>
Dmsh[DATA_WITH-1..0] = H"00"; OE = gnd;
Eena = gnd; _RW = vcc; _RS = gnd; Pause.aclr = gnd;
IF Din[DATA_WITH-1].q==0 THEN ST = r6; ELSE ST = b5; END IF;
-- Entry Mode Set = 000001IS, Increment & Shift OFF
WHEN r6 =>
Dmsh[DATA_WITH-1..0] = H"06"; OE = vcc;
Eena = vcc; _RW = gnd; _RS = gnd; Pause.aclr = vcc;
ST = b6;
WHEN b6 =>
Dmsh[DATA_WITH-1..0] = H"00"; OE = gnd;
Eena = vcc; _RW = vcc; _RS = gnd; Pause.aclr = vcc;
ST = c6;
WHEN c6 =>
Dmsh[DATA_WITH-1..0] = H"00"; OE = gnd;
Eena = gnd; _RW = vcc; _RS = gnd; Pause.aclr = gnd;
IF Din[DATA_WITH-1].q==0 THEN ST = r7; ELSE ST = b6; END IF;
-- Return Home
WHEN r7 =>
Dmsh[DATA_WITH-1..0] = H"02"; OE = vcc;
Eena = vcc; _RW = gnd; _RS = gnd; Pause.aclr = vcc;
ST = b7;
WHEN b7 =>
Dmsh[DATA_WITH-1..0] = H"00"; OE = gnd;
Eena = vcc; _RW = vcc; _RS = gnd; Pause.aclr = vcc;
ST = c7;
WHEN c7 =>
Dmsh[DATA_WITH-1..0] = H"00"; OE = gnd;
Eena = gnd; _RW = vcc; _RS = gnd; Pause.aclr = gnd;
IF Din[DATA_WITH-1].q==0 THEN ST = r8; ELSE ST = b7; END IF;
-- Clear Display
WHEN r8 =>
Dmsh[DATA_WITH-1..0] = H"01"; OE = vcc;
Eena = vcc; _RW = gnd; _RS = gnd; Pause.aclr = vcc;
ST = b8;
WHEN b8 =>
Dmsh[DATA_WITH-1..0] = H"00"; OE = gnd;
Eena = vcc; _RW = vcc; _RS = gnd; Pause.aclr = vcc;
ST = c8;
WHEN c8 =>
Dmsh[DATA_WITH-1..0] = H"00"; OE = gnd;
Eena = gnd; _RW = vcc; _RS = gnd; Pause.aclr = gnd;
IF Din[DATA_WITH-1].q==0 THEN ST = ds; ELSE ST = b8; END IF;
--формирование изображения
WHEN ds =>
Dmsh[DATA_WITH-1..0] = LINE[]; OE = vcc;
Eena = vcc; RW = gnd; _RS = vcc; Pause.aclr = vcc;
ST = bs;
WHEN bs =>
Dmsh[DATA_WITH-1..0] = H"00"; OE = gnd;
Eena = vcc; _RW = vcc; _RS = gnd; Pause.aclr = vcc;
ST = cs;
WHEN cs =>
Dmsh[DATA_WITH-1..0] = H"00"; OE = gnd;
Eena = gnd; _RW = vcc; _RS = gnd; Pause.aclr = gnd;
IF STR.q==H"F" THEN ST=dz0;
ELSIF Din[DATA_WITH-1].q==0 THEN ST = ds; ELSE ST = bs; END IF;
--перемещение в начало
WHEN dz0 =>
Dmsh[DATA_WITH-1..0] = H"40"; OE = vcc;
Eena = gnd; _RW = gnd; _RS = gnd; Pause.aclr = vcc;
ST = bz0;
WHEN bz0 =>
Dmsh[DATA_WITH-1..0] = H"00"; OE = gnd;
Eena = vcc; _RW = vcc; _RS = gnd; Pause.aclr = vcc;
ST = cz0;
WHEN cz0 =>
Dmsh[DATA_WITH-1..0] = H"00"; OE = gnd;
Eena = gnd; _RW = vcc; _RS = gnd; Pause.aclr = gnd;
IF Din[DATA_WITH-1].q==0 THEN ST = dz1; ELSE ST = bz0; END IF;
WHEN dz1 =>
Dmsh[DATA_WITH-1..0] = H"80"; OE = vcc;
Eena = vcc; _RW = gnd; _RS = gnd; Pause.aclr = vcc;
ST = bz1;
WHEN bz1 =>
Dmsh[DATA_WITH-1..0] = H"00"; OE = gnd;
Eena = vcc; _RW = vcc; _RS = gnd; Pause.aclr = vcc;
ST = cz1;
WHEN cz1 =>
Dmsh[DATA_WITH-1..0] = H"00"; OE = gnd;
Eena = gnd; _RW = vcc; _RS = gnd; Pause.aclr = gnd;
IF Din[DATA_WITH-1].q==0 THEN ST = ds; ELSE ST = bz1; END IF;
END CASE;
INBUF[5..0][DATA_WITH-1..0].clk=READ.q;
INBUF[5..0][DATA_WITH-1..0].d=IN[5..0][DATA_WITH-1..0];
IF ST==dz1 THEN READ.d=vcc; ELSE READ.d=gnd; END IF;
READ.clk=clk;
IF ST==ds THEN STR.clock=vcc; ELSE STR.clock=gnd; END IF;
STR.aclr=READ.q;
CASE STR.q[] IS
WHEN H"1" => LINE[]=INBUF[5][DATA_WITH-1..0];
WHEN H"2" => LINE[]=INBUF[4][DATA_WITH-1..0];
WHEN H"3" => LINE[]=INBUF[3][DATA_WITH-1..0];
WHEN H"4" => LINE[]=INBUF[2][DATA_WITH-1..0];
WHEN H"5" => LINE[]=INBUF[1][DATA_WITH-1..0];
WHEN H"6" => LINE[]=INBUF[0][DATA_WITH-1..0];
WHEN H"7" => LINE[]=H"20";
WHEN H"8" => LINE[]=H"43";
WHEN H"9" => LINE[]=H"44";
WHEN H"A" => LINE[]=H"45";
WHEN H"B" => LINE[]=H"46";
WHEN H"C" => LINE[]=H"47";
WHEN H"D" => LINE[]=H"48";
WHEN H"E" => LINE[]=H"49";
WHEN H"F" => LINE[]=H"4A";
END CASE;
END;
* промиль (миллионная часть, 10-6). Стабильность частоты
Допустимое отклонение частоты от номинального значения. Измеряется в процентах или в "ppm"
Дата: 2019-12-22, просмотров: 391.