Рассмотрим систему электросвязи для передачи дискретных сообщений (ДС). Источник сообщений вырабатывает во времени последовательность элементов, выбираемых из множества  , где m-общее число различных элементов множества. В зависимости от вида линии связи сообщения
, где m-общее число различных элементов множества. В зависимости от вида линии связи сообщения  предаются либо непосредственно, либо путем предварительной модуляции переносчика. Задача приемного устройства состоит в том, чтобы на основе анализа реализаций принятого сигнала вынести решение: какой передавался сигнал. При этом следует иметь в виду, что полностью безошибочное решение невозможно.
предаются либо непосредственно, либо путем предварительной модуляции переносчика. Задача приемного устройства состоит в том, чтобы на основе анализа реализаций принятого сигнала вынести решение: какой передавался сигнал. При этом следует иметь в виду, что полностью безошибочное решение невозможно.
Решение, соответствующее некоторому критерию оптимальности, называют оптимальным решением, а приемник, работающий в соответствии с таким критерием, - оптимальным приемником.
На рисунке 5.5 для случайной переменной z(T) показаны две плотности условных вероятностей -  — со средними значениями а, и а2. Эти функции именуются правдоподобием s1, и правдоподобием s2. Приведем их .
— со средними значениями а, и а2. Эти функции именуются правдоподобием s1, и правдоподобием s2. Приведем их .
 (7.1)
(7.1)
Здесь σ02 - дисперсия шума. На рисунке 7.1 правое правдоподобие p(z│s1) иллюстрирует вероятностное распределение сигналов на выходе детектора z(T) при переданном сигнале s1.
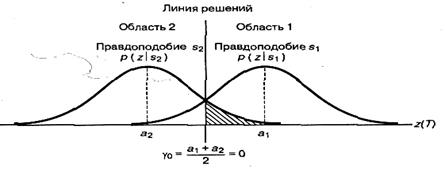
Рисунок 7.1 - Плотность условных вероятностей
Подобным образом левое правдоподобие p(z│s2) демонстрирует вероятностное распределение сигналов на выходе детектора г(Т) при переданном сигнале s2. Абсцисса z(Г) представляет полный диапазон возможных значений выборок на выходе корреляционного приемника, показанного на рисунке 7.2.

Рисунок 7.2 - Двоичный корреляционный приемник
При рассмотрении задачи оптимизации порога двоичного решения относительно принадлежности принятого сигнала к одной из двух областей было показано, что критерий минимума ошибок для равновероятных двоичных сигналов, искаженных гауссовым шумом, можно сформулировать следующим образом
 (7.2)
(7.2)
Здесь а1 - сигнальный компонент z(T) при передаче s1(t), а а2 - сигнальный компонент z(Т) при передаче s2(t). Порог γ0, равный (а1+а2)/2, - это оптимальный порог для минимизации вероятности принятия неверного решения при равновероятных сигналах и симметричных правдоподобиях. Правило принятия решения, приведенное в формуле (7.2), указывает, что гипотеза H1, (решение, что переданный сигнал - это s1(t) выбирается при z(T) >γ0. а гипотеза Н2 (решение, что переданный сигнал - это s2(t) - при z(T) < γ0 Если z(T) = γ. Решение может быть любым. При равновероятных антиподных сигналах с равными энергиями, где s1(t) = - s2(t) и а1=-а2, оптимальное правило принятия решения принимает следующий вид.
 (7.3)
(7.3)
7.2.1 Векторное представление сигналов MFSK (многочаcтотная фазовая манипуляция)
Поскольку сигнальное пространство MFSK описывается М взаимно перпендикулярными осями, мы без труда можем проиллюстрировать случаи М=2 и М = 3. Итак, на рисунке 7.3, а видим бинарные ортогональные векторы s1 и s2.
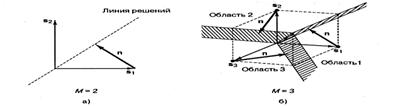
Рисунок 7.3 - Наборы сигналов для MFSK для М=2,3
На рисунке 7.3, б - показано трехмерное сигнальное пространство со взаимно перпендикулярными координатными осями. В этом случае плоскости решений разбивают пространство на три области. Показано, как к каждому сигнальному вектору s1, s2 и s3 прибавляется вектор шума n, представляющий минимальный вектор, который может привести к принятию неправильного решения. Векторы шума на рисунке 7.3, б имеют тот же модуль, что и вектор шума, показанный на рисунке 7.3, a. При данном уровне принятой энергии расстояние между любыми двумя векторами сигналов-прототипов si и sj-М-мерного ортогонального пространства является константой. Отсюда следует, что минимальное расстояние между вектором сигнала-прототипа и любой границей решений не меняется с изменением М. В отличие от модуляции MPSK, когда добавление нового сигнала к сигнальному множеству делало сигналы более уязвимыми к меньшим векторам шума, при MFSK такого не происходит.
Для иллюстрации этого момента можно было бы нарисовать ортогональные пространства высших размерностей, но, к сожалению, это затруднительно. Мы можем использовать только наш «мысленный взгляд», чтобы понять, что увеличение сигнального множества М путем введения дополнительных осей, причем, каждая новая ось перпендикулярна всем существующим, не приводит к его уплотнению. Следовательно, переданный сигнал, принадлежащий ортогональному набору, не становится более уязвимым к шуму при увеличении размерности.
Пониманию улучшения надежности при ортогональной передаче сигналов способствует сравнение зависимости вероятности символьной ошибки (РЕ) от ненормированного отношения сигнал/шум (signal-to-noise ratio — SNR) с зависимостью РЕ от Eb/N0. Стоит отметить, что изучение зависимости достоверности передачи от M при фиксированном SNR не является лучшим направлением в цифровой связи. Фиксированное SNR означает фиксированный объем энергии на символ; следовательно, при увеличении М этот объем энергии необходимо распределять уже между большим числом битов, т.е. на каждый бит приходится меньше энергии. В этой связи наиболее удобным способом сравнения различных цифровых систем является использование в качестве критерия отношения сигнал/шум, нормированного на бит, или Eb/N0. Повышение достоверности передачи с увеличением М проявляется только в том случае, если вероятность ошибки изображается как зависимость от Eb/N0. В этом случае при увеличении М отношение Eb/N0, требуемое для получения заданной вероятности ошибки, снижается при фиксированном SNR; следовательно, нам нужен новый график, где ось абсцисс представляет не SNR, a Eb/N0.
7.2.2 Векторное представление сигналов MPSK (многофазовая манипуляция). На рисунке 7.4 показаны наборы сигналов MPSK для М = 2, 4, 8 и 16. На рисунке 7.4, а видим бинарные (к=1, М = 2) антигодные векторы S1 и s2, угол между которыми равен 180°. Граница областей решений разделяет сигнальное пространство на две области. На рисунке также показан вектор шума n, равный по амплитуде сигналу S1,. При указанных направлении и амплитуде энергия вектора шума является минимальной, и детектор может допустить символьную ошибку.
На рисунке 7.4, б видим 4-арные (k = 2, М = 4) векторы, расположенные друг к другу под углом 90°. Границы областей решений (на рисунке изображена только одна) делят сигнальное пространство на четыре области.
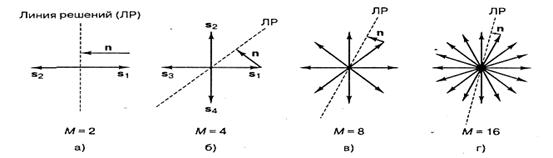
Рисунок 7.4 - Наборы сигналов MPSK для М=2,4,8,16
Здесь также изображен вектор шума n (начало — в вершине вектора сигнала, направление перпендикулярно ближайшей границе областей решений), являющийся вектором минимальной энергии, достаточной, чтобы детектор допустил символьную ошибку. Отметим, что вектор шума минимальной энергии на рисунке 7.4, б меньше вектора шума на рисунке 7.4 а, что свидетельствует о большей уязвимости 4-арной системы к шуму по сравнению с бинарной (энергии сигналов в обоих случаях взяты равными). Изучая рисунок 7.4, в, г, можно отмстить следующую закономерность. При многофазной передаче сигналов по мере роста величины М на сигнальную плоскость помещается все больше сигнальных векторов. По мере того как векторы располагаются плотнее, для появления ошибки вследствие шума требуется все меньше энергии.
С помощью рисунка 7.4 можно лучше понять поведение зависимости вероятности РB от Eb/N0, при росте к. Кроме того, рисунок позволяет взглянуть на природу компромиссов при многофазной передаче сигналов. Размещение большего числа векторов сигналов в сигнальном пространстве эквивалентно повышению скорости передачи данных без увеличения системной ширины полосы (все векторы ограничиваются одной и той же плоскостью). Другими словами, мы повысили использование полосы за счет вероятности ошибки. Рассмотрим рисунок 7.4, г, где из приведенных вариантов вероятность ошибки является наивысшей. Чем мы может заплатить, чтобы "выкупить" возросшую вероятность ошибки? Иными словами, чем мы можем поступиться, чтобы расстояние между соседними векторами сигналов на рисунке 7.4, д стало таким же, как на рисунке 7.4, а, Отметим, что на схемах, изображенных на рисунке 7.4, а для различных значений М, все векторы имеют одинаковую амплитуду. Это равносильно утверждению, что сопоставление различных схем выполняется при фиксированном отношении Es/N0, где Es - энергия символа.
Дата: 2019-12-22, просмотров: 417.