Цель лекции: изучение методов узкополосных передач и видов алфавитных кодов.
Содержание:
а) демодуляция и обнаружение;
б) обнаружение сигнала в гауссовом шуме;
в) согласованный фильтр;
г) межсимвольная интерференция;
Демодуляция и обнаружение
В течение данного интервала передачи сигнала T, бинарная узкополосная система передает один из двух возможных сигналов, обозначаемых как g1(t) и g2(t). Подобным образом бинарная полосовая система передает один из двух возможных сигналов, обозначаемых как s1(t) и s2(t). Поскольку общая трактовка демодуляции и обнаружения, по сути, совпадает для узкополосных и полосовых систем, будем использовать запись si(t) для обозначения передаваемого сигнала, вне зависимости от того, является система узкополосной или полосовой. Итак, для любого канала двоичный сигнал, переданный в течение интервала (0, Т), представляется следующим образом.
 (4.11)
(4.11)
Принятый сигнал г(t) искажается вследствие воздействия шума n(t) и, возможно, неидеальной импульсной характеристики канала hc(t) и описывается следующей формулой (4.12)
 (4.12)
(4.12)
В нашем случае n(t) предполагается процессом AWGN с нулевым средним, а знак "*" обозначает операцию свертки, Для бинарной передачи по идеальному, свободному от искажений каналу, где свертка с функцией hc(t) не ухудшает качество сигнала (поскольку для идеального случая hc(t) - импульсная функция), вид r(t) можно упростить.
 i=1,2 0≤t≤T (4.13)
i=1,2 0≤t≤T (4.13)
Типичные функции демодуляции и обнаружения цифрового приемника показаны на рисунке. 4.1. Некоторые авторы используют термины "демодуляция" и "обнаружение" как синонимы. В данном конспекте они имеют различные значения. Демодуляцию (demodulation) мы определим как восстановление сигнала (в неискаженный узкополосный импульс), а обнаружение (detection) - как процесс принятия решения относительно цифрового значения этого сигнала. При отсутствии кодов коррекции ошибок на выход детектора поступают аппроксимации символов (или битов) сообщений mi’ (также называемые жестким решением). При использовании кодов коррекции ошибок на выход детектора поступают аппроксимации канальных символов (или кодированных битов) u'i , имеющие вид жесткого или мягкого решения. Для краткости термин "обнаружение" иногда применяется для обозначения совокупности всех этапов обработки сигнала, выполняемых в приемнике, вплоть до этапа принятия решении.
В блоке демодуляции и дискретизации (рисунок 4.1) изображен принимающий фильтр (по сути, демодулятор), выполняющий восстановление сигнала » качестве подготовки к следующему необходимому этапу - обнаружению. Фильтрация в передатчике и канале обычно приводит к искажению принятой последовательности импульсов, вызванному межсимвольной интерференцией, а значит, эти импульсы не совсем готовы к дискретизации и обнаружению. Задачей принимающего фильтра является восстановление узкополосного импульса с максимально возможным отношением сигнал/шум (signal-to-noise ratio - SNR) и без межсимвольной интерференции. Оптимальный принимающий фильтр, выполняющий такую задачу, называется согласованным (matched), или коррелятором (correlator).. За принимающим фильтром может находиться выравнивающий фильтр (equalizing filter), или эквалайзер (equalizer); он необходим только в тех системах, в которых сигнал может искажаться вследствие межсимвольной интерференции, введенной каналом. Принимающий и выравнивающий фильтры показаны как два отдельных блока, что подчеркивает различие их функций. Впрочем, в большинстве случаев при использовании эквалайзера для выполнения обеих функций (а следовательно, и для компенсации искажения, внесенного передатчиком и каналом) может разрабатываться единый фильтр. Такой составной фильтр иногда называется просто выравнивающим или принимающим и выравнивающим.
На рисунке 4.1 выделены два этапа процесса демодуляции/обнаружения. Этап 1, преобразование сигнала в выборку, выполняется демодулятором и следующим за ним устройством дискретизации, в конце каждого интервала передачи символа Т, на выход устройства дискретизации детекторную точку, поступает выборка z(T), иногда называемая тестовой статистикой. Значение напряжения выборки z(T) прямо пропорционально энергии принятого символа и обратно пропорционально шуму. На этапе 2 принимается решение относительно цифрового значения выборки (выполняется обнаружение). Предполагается, что шум является случайным гауссовым процессом, а принимающий фильтр демодулятора — линейным. Линейная операция со случайным гауссовым процессом дает другой случайный гауссов процесс. Следовательно, на выходе фильтра шум также является гауссовым. Значит, выход этапа 1 можно описать выражением

 (4.14)
(4.14)
где  — желаемый компонент сигнала, а
— желаемый компонент сигнала, а  — шум. Для упрощения записи выражение (4.14) будем иногда представлять в виде z = ai+n0. Шумовой компонент n0 - это случайная гауссова переменная с нулевым средним, поэтому z(T) — случайная гауссова переменная со средним a1 или a2, в зависимости от того, передавался двоичный нуль или двоичная единица. Плотность вероятности случайного гауссового шума n0 можно выразить как
— шум. Для упрощения записи выражение (4.14) будем иногда представлять в виде z = ai+n0. Шумовой компонент n0 - это случайная гауссова переменная с нулевым средним, поэтому z(T) — случайная гауссова переменная со средним a1 или a2, в зависимости от того, передавался двоичный нуль или двоичная единица. Плотность вероятности случайного гауссового шума n0 можно выразить как
 (4.15)
(4.15)
где  2 - дисперсия шума Используя выражения (4.14) и (4.15), можно выразить плотности условных вероятностей
2 - дисперсия шума Используя выражения (4.14) и (4.15), можно выразить плотности условных вероятностей  и
и  .
.
 (4.16)
(4.16)
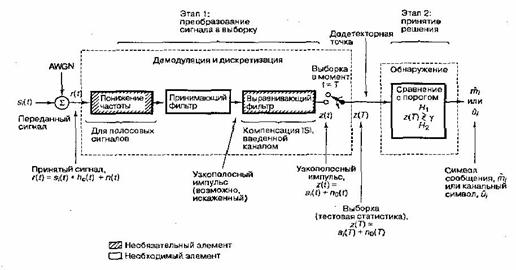
Рисунок 4.1 - Два основных этапа демодуляции/обнаружения цифровых сигналов.
Дата: 2019-12-22, просмотров: 434.