Реферат
1. Пояснительная записка:27 стр., 4 рис, 8 литературных источников
2. Пояснительная записка состоит из трех разделов. В введении описывается назначение и цели курсового проектирования. В организационно-технологической части дается характеристика технологического процесса получения моно фосфата аммония и описание установки барабанной-гранулятор сушилки. В технической части произведено краткое описание работы БГС, и функционально-технологической схемы установки БГС. Так же в этом разделе подбираются элементы контроля и управления технологической операции.
В расчетной части рассчитывается надежность, вероятность отказов системы автоматики и контроля технологической операции
Содержание
Реферат………………..…………………………………………………………..3
Введение…………………………………….…………………………………....5
Организационно-технологическая часть ..………..……………………………7
Описание технологического процесса……………………………………….7
Характеристики основного технологического оборудования……………. 12
Характеристики сырья и материалов, применяемых в производстве……..13
Выбор элементов и контроля технологической операции……………………14
Выбор схемы автоматизации контроля и управления температуры на выходе БГС………………………………………………………….……………………14
Принцип работы схемы автоматизации……………………………………..14
Выбор приборов для автоматизации, контроля и управления технологической операцией…………………………………………………14
Технологическая карта……………………………………………………….14
Описание элементной базы……………………………………………………..15
Блок преобразования сигнала термопар БПТ-22……………………………15
Микроконтроллер АТ89С2051……………………………………………….18
Расходомер Метран – 335…………………………………………………….19
Электромагнитный клапан ВН1М-1К……………………………………….21
Источник питания постоянного тока БП96-24……………………………...22
Расчетная часть…………………………………………………………………..23
Анализ основных показателей надежности………………………………….23
Расчет надежности блоков питания в функционально-технологической схеме…………………………………………………………………………...23
Заключение………………………………………………………………………26
Список литературы……………………………………………………………..27
Введение
Автоматизация – одна из ведущих отраслей науки и техники, развивается особенно динамично, она проникает во все сферы человеческой деятельности. Автоматизация качественно изменяет характер труда рабочих. В цехах с автоматизированным производством главной фигурой становится специалист новой формации – оператор, программист, рабочие других ранее не существующих профессий. Автоматизация технологических процессов является одним из решающих факторов повышения производительности и улучшений условий труда. Современными проектами производств в нефтепереработки, химии и нефтехимии, объектах производства минеральных удобрений, энергетики, и др., предусматривается комплексная автоматизация технологических процессов.
В ходе автоматизации производственных процессов сокращается тяжелый труд, увеличивается производительность труда: наступает новый этап машинного труда – автоматизация, - когда человек освобождается от непосредственного участия в производстве. Функции контроля и управления технологическими процессами предаются автоматическим установкам. Это приводит к улучшению основных показателей эффективности производства и снижению себестоимости продукции.
В течении ряда десятилетий под автоматикой понималось прежде всего выполнение без участия человека некоторых действий, однозначно связывающих причину и следствие.
Сущность современного этапа развития автоматизации можно было бы кратко охарактеризовать как переход от автоматизации «действий» к автоматизации «принятия решений». То есть, переход от так называемой цикловой (обеспечивающей выполнение чисто повторных действий) автоматики и автоматической стабилизации технологических режимов к использованию средств, обеспечивающих оптимизацию процессов, к осуществлению органической связи основного производственного оборудования с автоматикой.
В каждом производственном процессе, наряду с «вещественными потоками», существуют совершенно другие потоки, которые можно назвать «информационными». Они представляют собой некоторую первичную информацию о ходе производственного процесса и необходимы для контроля и управления. Эта информация передается на соответствующие пункты управления (например, в операторную, диспетчерскую и т. п.), где подвергается обработке и используется для принятия решений при управлении процессом.
Автоматическое регулирование технологических процессов на различных предприятиях позволяет получить высокую производительность при наименьших производственных затратах и высоком качестве продуктов. Однако системы автоматического регулирования оказываются не достаточно эффективными, если они спроектированы только на основании общих положений теорем автоматического регулирования. Для наиболее эффективной работы таких систем их необходимо проектировать с учетом особенностей технологических процессов, для которых они предназначены.
Довольно часто системы автоматики, разработанные непосредственно на предприятиях, работают вполне удовлетворительно. Это указывает с одной стороны, на то, что заводские инженеры в состоянии справится с решением таких задач, а с другой стороны – на то, что успешное проектирование систем автоматики иногда может быть выполнено без применения очень сложного математического аппарата. Такое положение объясняется наличием простых правил установки и наладки автоматических регуляторов.
В настоящее время рядом ученых в различных лабораториях и университетах созданы более прогрессивные принципы проектирования систем автоматического регулирования. Однако прелагаемые ими методы обычно не реализуются полностью, если в разработке систем не участвуют люди, которые должны их эксплуатировать. Проблемы, связанные с автоматическим регулированием технологических процессов, как правило, возникают на заводе, поэтому должны решаться на самом предприятии. До тех пор, пока проектировщики систем автоматического регулирования и эксплуатационники не будут связанны между собой, их общие проблемы остаются нерешенными. Несмотря на то, что решение задач автоматического регулирования возможно математическими методами, эти же задачи приближенно могут быть решены путем довольно не сложных приемов. Таким образом, уравнение высокого порядка и быстродействующие вычислительные машины целесообразно применять лишь там, где более простыми методами решить задачи не удается.
Блестяще разработанные общие положения о системах автоматического регулирования, а также математическое описание процесса регулирования сами по себе никакой ценности не представляют. Системы автоматического регулирования должны учитывать свойства технологического процесса с целью обеспечения оптимального протекания процесса.
Без глубокого знания технологического процесса, система регулирования не может быть спроектирована квалифицированно. Для автоматического регулирования необходимо максимально знать требования, предъявляемые к химико-технологическим процессам.
Описание элементной базы
Блок преобразования сигнала термопар БПТ-22
1.1 Блок БПТ-22, предназначен для преобразования сигналов низкого уровня и термопар типа ТХА(K), ТХК(L), ТВР, ТПП(S), ТПР(B) в унифицированный сигнал постоянного тока 0-5 мА,0-20 мА, 4-20 мА. Блок БПТ-22 имеет два идентичных, гальванически не связанных канала преобразования. Блок обеспечивает компенсацию термо Э.Д.С. свободных концов термопары, а также подавление нуля входного сигнала и масштабирование диапазона измерения входног осигнала.
1.2 Оба канала БПТ-22 рассчитаны на подключение одинаковых термопар, имеющих одинаковую настройку. БПТ-22 может использоваться не только для преобразования сигнала термопар, но также для усиления напряжения низкого уровня (0÷100) мВ, полученного от источника Е.
1.3 Преобразователь может быть использован в системах автоматизированного регулирования и управления технологическими процессами в энергетике, металлургии, в измерительных системах и измерительно-вычислительных комплексах.
2.1 Основные технические характеристики БПТ-22 приведены в табл. 1 и 2.
Таблица 1
| Название параметра и размер | Единица измерения | Норма |
| 1 Количество независимых каналов | шт. | 2 |
| 2 Схема подключения датчика | Двухпроводная | |
| 3 Начальное значение входного сигнала | мВ | 0; 2; 4; 6; 8; 10; 12; 14; 16; 18; 20; 25; 30; 40. |
| 4 Номинальный диапазон изменения входного сигнала | мВ | 1;2;5; 10; 15; 25; 40; 60; 80; 100. |
| 5 Сопротивление нагрузки для выходного сигнала: 0-5мА, не более 0-20мА, не более 4-20мА, не более | Ом | 2000 500 500 |
| 6 Основная погрешность преобразования входного сигнала, выраженная в процентах от номинального диапазона изменения выходного сигнала не превышает | % | ± 0,25 - для блоков с диапазоном изменения входного сигнала ∆U≥ 10 мВ ± [0,25+0,25*(10/∆U-1)] - для блоков с диапазоном изменения входного сигнала ∆U< 10 мВ |
| 7 Напряжение питания, от неста-билизированого источника постоянного тока | В | 24 ±15% |
| 8 Ток потребления, не более | мА | 120 |
| 9 Габаритные размеры | мм | 125x75x26 |
| 10 Степень защиты | IP30 | |
| 11 Масса, не более | кг | 0,2 |
| Таблица 2 - |
| ||||
| Тип Датчика | ТПР(B), Е | ТПП(S) | ТВР | ТХА(K) | ТХК(L) |
| Коэффициент преобразования | 0 | 0,0060 | 0,0126 | 0,0404 | 0,0660 |
2.2 По стойкости к климатическому воздействию БПТ-22 отвечает исполнению УХЛ категории размещения 4.2 по ГОСТ 15150 - 69, но для работы при температуре от +1 до +40 °С. При внешнем принудительном охлаждении корпуса допускается работа при температуре до +50 °С.
2.3 По стойкости к механическому воздействию БПТ-22 выполнены в вибростойком исполнении L3, по защите от действия окружающей среды в обычном исполнении по ГОСТ 2997-84.
2.4 Блок БПТ-22 может эксплуатироваться только в закрытых взрывобезопасных
помещениях.
2.5 Средний срок эксплуатации не менее 10 лет.
2.6 Средний срок хранения 1 год в условиях по группе 1 ДСТ 20790 - 82.
2.7 Граница допустимого значения дополнительной погрешности преобразования при изменении напряжения питания от номинального значения в границах указанных в таблицы 1 не превышает ±0,1% от диапазона изменения соответствующего сигнала.
2.8 Граница допустимого значения дополнительной погрешности преобразования при изменении температуры окружающей среды на каждые 10 °С в диапазоне от 1 до 50 °С не превышает ±0,2% от диапазона изменения соответствующего сигнала.
2.9 Граница допустимого значения дополнительной погрешности преобразования при действии постоянных магнитных полей или переменных полей сетевой частоты с напряженностью до 400 А/м не превышает ±0,2% от диапазона изменения соответствующего сигнала.
2.10 Величина пульсации выходного тока не превышает половины границы допустимого значения основной погрешности.
Принцип работы блока
Блок схема преобразователя, приведенная на рисунке 1. Преобразователь состоит из следующих основных функциональных узлов:
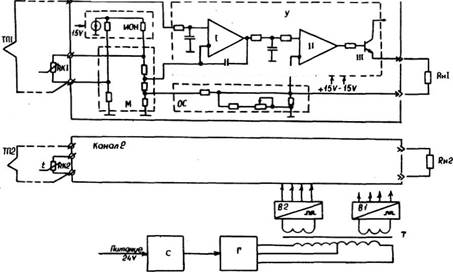
Рисунок 1 - Блок-схема преобразователя БПТ-22.
М - мостовая схема;
У - трёх каскадный усилитель;
ОС - цепь отрицательной обратной связи;
В1, В2-источники питания;
ИОН -источник образцового напряжения;
С, Г, Т-стабилизатор, генератор Роера с развязывающим трансформатором;
4.3 С помощью мостовой схемы осуществляется компенсация нулевого начального значения входного сигнала. Мостовая схема блоков, предназначенных для работы с термопарами типов ТХА, ТХК, ТВР, ТПП дополнительно осуществляет автоматическую компенсацию термо Е.Д.С. свободных концов термопары с помощью медного чувствительного элемента Rк, включённого в плечо моста и установленного вблизи места подключения свободных концов термопары ТП в клеммной колодке.
4.4 Выходной сигнал блока суммированый с выходным напряжением мостовой схемы, поступает на входной каскад усилителя канала, являющийся одновременно активным фильтром. На выходе первого каскада включён дополнительный RC - фильтр, который совместно с первым каскадом обеспечивает необходимое подавление поперечной помехи.
4.5 Второй и третий каскад обеспечивают усиление по мощности до унифицированного сигнала постоянного тока. Все каскады усилителя охвачены отрицательной обратной связью по выходному току.
4.6 Источники В1 (В2) обеспечивают напряжения необходимые для питания каскадов усилителя, а также источника образцового напряжения ИОН, который формирует образцовое напряжение для питания мостовой схемы.
4.7 Для обеспечения помехозащищённости и гальванического разделения каналов друг от друга питание каждого канала усилителя осуществляется от отдельной обмотки развязывающего трансформатора Т, являющегося частью схемы генератора Роера Г. Генератор Роера стабилизирован по питанию стабилизатором С.
Микроконтроллер АТ89С2051
• Совместимость с приборами семейства MCS-51™
• Емкость перепрограммируемой Flash памяти: 2 Кбайт, 1000 циклов стирание/ запись
• Диапазон рабочих напряжений от 2,7 В до 6 В
• Полностью статический прибор - диапазон рабочих частот от 0 Гц до 24 МГц
• Двухуровневая блокировка памяти программ
• СОЗУ емкостью 128 байтов
• 15 программируемых линий ввода/вывода
• Два 16-разрядных таймера/счетчика событий
• Шесть источников сигналов прерывания
• Программируемый последовательный канал UART
• Выходы прямого управления СИД
• Встроенный аналоговый компаратор
• Пассивный (idle) и стоповый (power down) режимы
• Промышленный (-40°С...85°С) и коммерческий (0°С...70°С) диапазоны температур
• 20-выводные корпуса PDIP и SOIC
КМОП микроконтроллер АТ89С2051, оснащенный Flash программируемым и стираемым ПЗУ, совместим по системе команд и по выводам со стандартными приборами семейства MCS-51™. Микроконтроллер содержит 2 Кбайта Flash ПЗУ, 128 байтов ОЗУ, 15 линий ввода/вывода, два 16-разрядных таймера/счетчика событий, полнодуплексный последовательный порт (UART), пять векторных двухуровневых прерываний, встроенный прецизионный аналоговый компаратор, встроенные генератор и схему формирования тактовой последовательности. Программирование Flash памяти программ ведется с использованием напряжения 12 В, ее содержимое может быть защищено от несанкционированных записи/считывания. Имеется возможность очистки Flash памяти за одну операцию, возможность считывания встроенного кода идентификации.
Потребление в активном режиме на частоте 12 МГц не превышает 15 мА и 5,5 мА при напряжении питания 6 В и 3 В, соответственно. При тех же условиях в пассивном режиме, при котором остановлено ЦПУ но система прерываний, ОЗУ, таймер/ счетчик событий и последовательный порт остаются активными, потребление не превышает 5 мА и 1 мА. В стоповом режиме потребление не превышает 100 мкА и 20 мкА при напряжении питания 6 В и 3 В, соответственно.
Расходомер Метран - 335
Принцип измерения расхода – вихревой. Диаметр условного прохода многопараметрического датчика: 32, 50, 80, 100, 150 мм.
Пределы измерений расхода при рабочих условиях 6...5000 м3/ч. Динамический диапазон по расходу 1:30. Взрывозащищенное исполнение. Связь с внешними устройствами вычислительной техники.
Основные преимущества:
· одновременное измерение 3-х параметров среды (F, Р, Т) одним многопараметрическим датчиком;
· существенное сокращение кабельных линий и врезок в трубопровод, удобство монтажа;
· отсутствие подвижных элементов в проточной части;
· снижение потерь давления по сравнению с измерением расхода методом перепада давлений на диафрагме и турбинными расходомерами;
· возможность эксплуатации многопараметрического датчика Метран-335 в помещениях категории В-1а, В-16, а также на открытом воздухе;
· архивирование данных по часам, суткам и месяцам;
· сохранение архивных данных в течение 5 лет, в т.ч и при отсутствии питания;
· защита от несанкционированного доступа;
· возможность построения сети сбора данных.
Технические характеристики
· Измеряемая среда: природный газ, сжатый воздух, технические газы.
· Параметры измеряемой среды: температура от -20 до 50 °С; избыточное давление в трубопроводе до 1,6 МПа; плотность при нормальных условиях: 0,6…1,3 кг/м3.
· Динамический диапазон по расходу 1:30
· Пределы измерений расхода при рабочих условиях (РУ) и исполнения по давлению приведены в табл.1, 2 соответственно.
Таблица 1
| Диаметр условного прохода датчика Dy, мм | Расход газа при РУ, м3/ч | ||
| минимальный, Fmin | номинальный, Fhom | максимальный, Fmax | |
| 32* | 6 | 80 | 160 |
| 50 | 15 | 265 | 530 |
| 80 | 30 | 500 | 1000 |
| 100 | 80 | 1250 | 2500 |
| 150 | 150 | 2500 | 5000 |
Таблица 2
| Параметр | Исполнение по давлению | |||
| Максимальное рабочее избыточное давление, МПа | 0,25 | 0,6 | 1,0 | 1,6 |
| Диапазон рабочих избыточных давлений, МПа | 0...0.25 | 0,2...0,6 | 0,3...1,0 | 0,5...1,6 |
Метрологические характеристики
Таблица 3
| Основная допускаемая погрешность измерений | Относительная, % | Абсолютная | |||
| Параметр | Расход при РУ | Объем при РУ | Время | Избыточное давление, МПа | Температура, °С |
| Предел | ±2,0 | ±1,5 | ±0,01 | ±(0,001+0,01 Р), где Р - измеренное давление | ±0,5 |
· Выходной сигнал датчика для связи с вычислителем - цифровой код по 4-м параметрам F,V,P,T.
· Длина кабеля связи до 300 м.
· Интерфейсы для связи RS232C, RS485.
· Подключаемые устройства вычислительной техники: ПК, принтер с последовательным интерфейсом (EPSON LX или
аналогичный), Hayes-совместимый модем (US Robotics или аналогичный).
· Возможность организации сети сбора данных с передачей информации по коммутируемым телефонным линиям.
Максимальное количество счетчиков, объединяемых в сеть - 256 шт.
· Программное обеспечение для диспетчеризации и связи с ПК входит в комплект поставки.
· Настройка счетчика производится на заводе-изготовителе или пользователем с ПК.
Устройство и принцип действия
Конструктивно датчик представляет собой моноблок, состоящий из корпуса проточной части и электронного блока. В корпусе проточной части датчика размещены первичные преобразователи объемного расхода, избыточного давления и температуры.
Электронный блок представляет собой плату цифровой обработки сигналов первичных преобразователей, заключенную в корпус.
Измерение расхода газа реализовано на вихревом принципе действия. На входе в проточную часть датчика установлено тело обтекания. За телом обтекания, по направлению потока газа, симметрично расположены два пьезоэлектрических преобразователя пульсаций давления. При протекании потока газа через проточную часть датчика за телом обтекания образуется вихревая дорожка, частота следования вихрей в которой с высокой точностью пропорциональна скорости потока, а, следовательно, и расходу. В свою очередь, вихреобразование приводит к появлению за телом обтекания пульсаций давления среды. Частота пульсаций давления идентична частоте вихреобразования и в данном случае служит мерой расхода.
Пульсации давления воспринимаются пьезоэлектрическими преобразователями, сигналы с которых в форме электрических колебаний поступают на плату цифровой обработки, где происходит вычисление объемного расхода и объема газа при РУ и формирование выходных сигналов по данным параметрам в виде цифрового кода.
Преобразователь избыточного давления тензорезистивного принципа действия размещен перед телом обтекания вблизи места его крепления. Он осуществляет преобразование значения избыточного давления потока в трубопроводе в электрический сигнал, который с выхода мостовой схемы преобразователя поступает на плату цифровой обработки.
Термопреобразователь сопротивления платиновый размещен внутри тела обтекания. Для обеспечения непосредственного контакта ТСП со средой в теле обтекания выполнены отверстия . Электрический сигнал термопреобразователя также подвергается цифровой обработке.
Плата цифровой обработки, содержащая два микропроцессора, производит обработку сигналов преобразователей пульсаций давления, избыточного давления и температуры, в ходе которой обеспечивается фильтрация паразитных составляющих, обусловленных влиянием вибрации, флуктуации давления и температуры потока, и происходит формирование выходных сигналов многопараметрического датчика по расходу, объему при РУ, давлению и температуре в виде цифрового кода, выходные сигналы передаются на вычислитель.
Проточная часть датчика и тело обтекания выполнены из стали 12Х18Н10Т.
Расчетная часть
Анализ основных показателей надежности
Расчет надежности блоков питания в функционально-технологической схеме
Определяем опасность отказов блоков питания БП96-24. Исходя из данных работы этих установок за год, в течении года за 8760 часов из восьми приборов отказало два.
Решение
1.Определяем среднее число исправно работающих блоков питания по формуле (3.1):
NСР =  , (3.1)
, (3.1)
где NН – число исправно работающих элементов в начале времени Dt; NН = 8
NК – число исправно работающих элементов в конце Dt; NК = 6
NСР = (8+6)/2 = 7
2. Определяем опасность отказов по формуле (3.2):
l(t) =  , (3.2)
, (3.2)
где DN – число элементов, отказывающих за время Dt; DN = 2
Dt – время работы Dt = 1 год = 8640 часов в год 1/ч
l(t) = 2/(7*8640) = 0,3*10-6 1/ч
3. Определяем среднее время исправной работы блоков питания по формуле (3.3):
tСР =  , (3.3)
, (3.3)
tСР = 106/0,3 = 3333333 часов
1.Определяем вероятную надежность блоков питания
Р(t) = е -2Dt , (3.4)
Р(t) = е -0,3*10(-6)*8640 = 1/е0,0026 = 0,9965
Вероятность исправной работы может иметь значение 0 £ Р(t) £ 1
2.Определяем вероятность отказов (ненадежность)
Q = 1- Р(t), (3.5)
Q = 1- 0,9965 = 0,0035
6. Определяем коэффициент готовности системы автоматики уровнемеров по формуле (3.6):
kГ =  , (3.6)
, (3.6)
где tИ – время исправной работы, час;
tП – время простоя
За год (8640 часов) БПТ-22 простаивает примерно 720 часов, тогда
tИ = 8640-720 = 7920 часов
kГ = 7920/(7920+720) = 0,92
7.Определяем коэффициент вынужденного простоя
kП =  , (3.7)
, (3.7)
kП = 720/(720+7920) = 0,08
Проверка, должно выполняется условие kГ + kП = 1
0,92 + 0,08 = 1® Условие выполняется
3.1.2. Расчет надежности работы элементов взрывозащищенной части блока питания БП96-24 за 1 год.
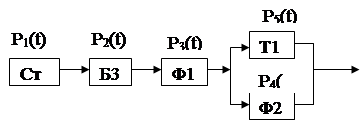 Рис 4 – Расчетная схема блока питания
Рис 4 – Расчетная схема блока питания
Ст1 – стабилизированный источник питания, содержащий в своем составе трансформатор
Б3 – барьер искрозащиты, основан на стабилитронах
Ф1 и Ф2 – фильтры
Т1 – операционный триггер.
Исходные данные: опасность отказов
1.l СТ1 = (0,02¸64)*10-6 принимаем l =1*10-6 ч-1
2.lБ3 = (0,08¸0,3)*10-6 ч-1. Принимаем l = 0,1*10-6 ч-1
3.lФ1 = (0,14¸3)*10-6 ч-1. Принимаем l = 0,2*10-6 ч-1
4.lФ2 = (0,14¸3)*10-6 ч-1. Принимаем l = 1,5*10-6 ч-1
5.l Т1 = (0,03¸0,2)*10-6 ч-1. Принимаем l = 0,17*10-6 ч-1
Решение
Вероятность безотказной работы определяем по формуле (3.4):
Р(t) = е -2Dt
Р1(t) = е -10(-6)*8640 = 0,9913
Р2(t) = е -0,1*10(-6)*8640 = 0,9992
Р3(t) = е -0,2*10(-6)*8640 = 0,9983
Р4(t) = е -1,5*10(-6)*8640 = 0,9871
Р5(t) = е -0,17*10(-6)*8640 = 0,9985
При последовательной работе систем автоматики надежность системы определяется произведение по формуле (3.8):
Р(t) =  , (3.8)
, (3.8)
Р1,2,3(t) = Р1(t)* Р2(t)* Р3(t) = 0,9913*0,9992*0,9983 = 0,9898
При параллельной работе элементов системы автоматики надежность системы определяется по формуле (3.9)
Р(t) = 1-  , (3.9)
, (3.9)
Р4,5(t) = 1-(1- Р4(t))(1- Р5(t)) = 1-(1-0,9871)(1-0,99850 = 1-(0,0129*0,0015) = 0,9999
Определяем общую надежность системы
РОБЩ(t) = Р1,2,3(t)* Р4,5(t), (3.10)
РОБЩ(t) = 0,9898*0,9999 = 0,9897
Вывод: общая вероятность надежности элементов взрывозащищенной части функциональной схемы блока питания БП96-24 равна 0,9897.

Заключение
В ходе курсового проекта по дисциплине «Технически средства автоматизации» на тему «Автоматизация установки барабанной-гранулятор сушилки» был описан технологический процесс производства монофосфата аннония. Разработана функционально-технологическая схема к этой установки. Был произведен выбор блока преобразования сигналов термопар БПТ-22 (с блоком питания БП96-24), расходомером типа Метран-335, электромагнитного клапана типа ВН6М-1К, микроконтроллера АТ89С2051. Что позволило регулировать температуру на выходе БГС в точно заданных пределах, это привело к экономии энергоресурсов, повышению качества продукта, уменьшению бракованного продукта. Что повлияло на уменьшение себестоимости продукта и увеличение прибыли от производства.
Список литературы
1. Л.М. Михайлов. Проектирование, монтаж и эксплуатация систем автоматизации. – Ленинград: Ленинградский университет., 1989. – 258с.: ил.
2. А.С. Клюев. Проектирование систем автоматизации технологических процессов. – М.: Техпром., 1980. – 421с: ил.
3. Алиев Т.М., Тер-Хачатуров А.А.. Измерительная техника: Учеб. пособие для тех. вузов. – М.: Высшая школа., 1991. – 384с.: ил.
4. Технологический регламент цеха «Аммофос».
5. Руководство по эксплуатации блока преобразования сигналов термопар БПТ-22.
6. Руководство по эксплуатации расходомера типа Метран-335
7. Руководство по эксплуатации электромагнитного клапана типа ВН6М-1К
8. Руководство по эксплуатации. Блок питания БП96-24
Реферат
1. Пояснительная записка:27 стр., 4 рис, 8 литературных источников
2. Пояснительная записка состоит из трех разделов. В введении описывается назначение и цели курсового проектирования. В организационно-технологической части дается характеристика технологического процесса получения моно фосфата аммония и описание установки барабанной-гранулятор сушилки. В технической части произведено краткое описание работы БГС, и функционально-технологической схемы установки БГС. Так же в этом разделе подбираются элементы контроля и управления технологической операции.
В расчетной части рассчитывается надежность, вероятность отказов системы автоматики и контроля технологической операции
Содержание
Реферат………………..…………………………………………………………..3
Введение…………………………………….…………………………………....5
Организационно-технологическая часть ..………..……………………………7
Описание технологического процесса……………………………………….7
Характеристики основного технологического оборудования……………. 12
Характеристики сырья и материалов, применяемых в производстве……..13
Выбор элементов и контроля технологической операции……………………14
Выбор схемы автоматизации контроля и управления температуры на выходе БГС………………………………………………………….……………………14
Принцип работы схемы автоматизации……………………………………..14
Выбор приборов для автоматизации, контроля и управления технологической операцией…………………………………………………14
Технологическая карта……………………………………………………….14
Описание элементной базы……………………………………………………..15
Блок преобразования сигнала термопар БПТ-22……………………………15
Микроконтроллер АТ89С2051……………………………………………….18
Расходомер Метран – 335…………………………………………………….19
Электромагнитный клапан ВН1М-1К……………………………………….21
Источник питания постоянного тока БП96-24……………………………...22
Расчетная часть…………………………………………………………………..23
Анализ основных показателей надежности………………………………….23
Расчет надежности блоков питания в функционально-технологической схеме…………………………………………………………………………...23
Заключение………………………………………………………………………26
Список литературы……………………………………………………………..27
Введение
Автоматизация – одна из ведущих отраслей науки и техники, развивается особенно динамично, она проникает во все сферы человеческой деятельности. Автоматизация качественно изменяет характер труда рабочих. В цехах с автоматизированным производством главной фигурой становится специалист новой формации – оператор, программист, рабочие других ранее не существующих профессий. Автоматизация технологических процессов является одним из решающих факторов повышения производительности и улучшений условий труда. Современными проектами производств в нефтепереработки, химии и нефтехимии, объектах производства минеральных удобрений, энергетики, и др., предусматривается комплексная автоматизация технологических процессов.
В ходе автоматизации производственных процессов сокращается тяжелый труд, увеличивается производительность труда: наступает новый этап машинного труда – автоматизация, - когда человек освобождается от непосредственного участия в производстве. Функции контроля и управления технологическими процессами предаются автоматическим установкам. Это приводит к улучшению основных показателей эффективности производства и снижению себестоимости продукции.
В течении ряда десятилетий под автоматикой понималось прежде всего выполнение без участия человека некоторых действий, однозначно связывающих причину и следствие.
Сущность современного этапа развития автоматизации можно было бы кратко охарактеризовать как переход от автоматизации «действий» к автоматизации «принятия решений». То есть, переход от так называемой цикловой (обеспечивающей выполнение чисто повторных действий) автоматики и автоматической стабилизации технологических режимов к использованию средств, обеспечивающих оптимизацию процессов, к осуществлению органической связи основного производственного оборудования с автоматикой.
В каждом производственном процессе, наряду с «вещественными потоками», существуют совершенно другие потоки, которые можно назвать «информационными». Они представляют собой некоторую первичную информацию о ходе производственного процесса и необходимы для контроля и управления. Эта информация передается на соответствующие пункты управления (например, в операторную, диспетчерскую и т. п.), где подвергается обработке и используется для принятия решений при управлении процессом.
Автоматическое регулирование технологических процессов на различных предприятиях позволяет получить высокую производительность при наименьших производственных затратах и высоком качестве продуктов. Однако системы автоматического регулирования оказываются не достаточно эффективными, если они спроектированы только на основании общих положений теорем автоматического регулирования. Для наиболее эффективной работы таких систем их необходимо проектировать с учетом особенностей технологических процессов, для которых они предназначены.
Довольно часто системы автоматики, разработанные непосредственно на предприятиях, работают вполне удовлетворительно. Это указывает с одной стороны, на то, что заводские инженеры в состоянии справится с решением таких задач, а с другой стороны – на то, что успешное проектирование систем автоматики иногда может быть выполнено без применения очень сложного математического аппарата. Такое положение объясняется наличием простых правил установки и наладки автоматических регуляторов.
В настоящее время рядом ученых в различных лабораториях и университетах созданы более прогрессивные принципы проектирования систем автоматического регулирования. Однако прелагаемые ими методы обычно не реализуются полностью, если в разработке систем не участвуют люди, которые должны их эксплуатировать. Проблемы, связанные с автоматическим регулированием технологических процессов, как правило, возникают на заводе, поэтому должны решаться на самом предприятии. До тех пор, пока проектировщики систем автоматического регулирования и эксплуатационники не будут связанны между собой, их общие проблемы остаются нерешенными. Несмотря на то, что решение задач автоматического регулирования возможно математическими методами, эти же задачи приближенно могут быть решены путем довольно не сложных приемов. Таким образом, уравнение высокого порядка и быстродействующие вычислительные машины целесообразно применять лишь там, где более простыми методами решить задачи не удается.
Блестяще разработанные общие положения о системах автоматического регулирования, а также математическое описание процесса регулирования сами по себе никакой ценности не представляют. Системы автоматического регулирования должны учитывать свойства технологического процесса с целью обеспечения оптимального протекания процесса.
Без глубокого знания технологического процесса, система регулирования не может быть спроектирована квалифицированно. Для автоматического регулирования необходимо максимально знать требования, предъявляемые к химико-технологическим процессам.
Организационно-технологическая часть
Дата: 2019-12-10, просмотров: 315.